
一种船用吊机及其吊装控制系统和吊装控制方法.pdf

长春****主a

1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种船用吊机及其吊装控制系统和吊装控制方法.pdf
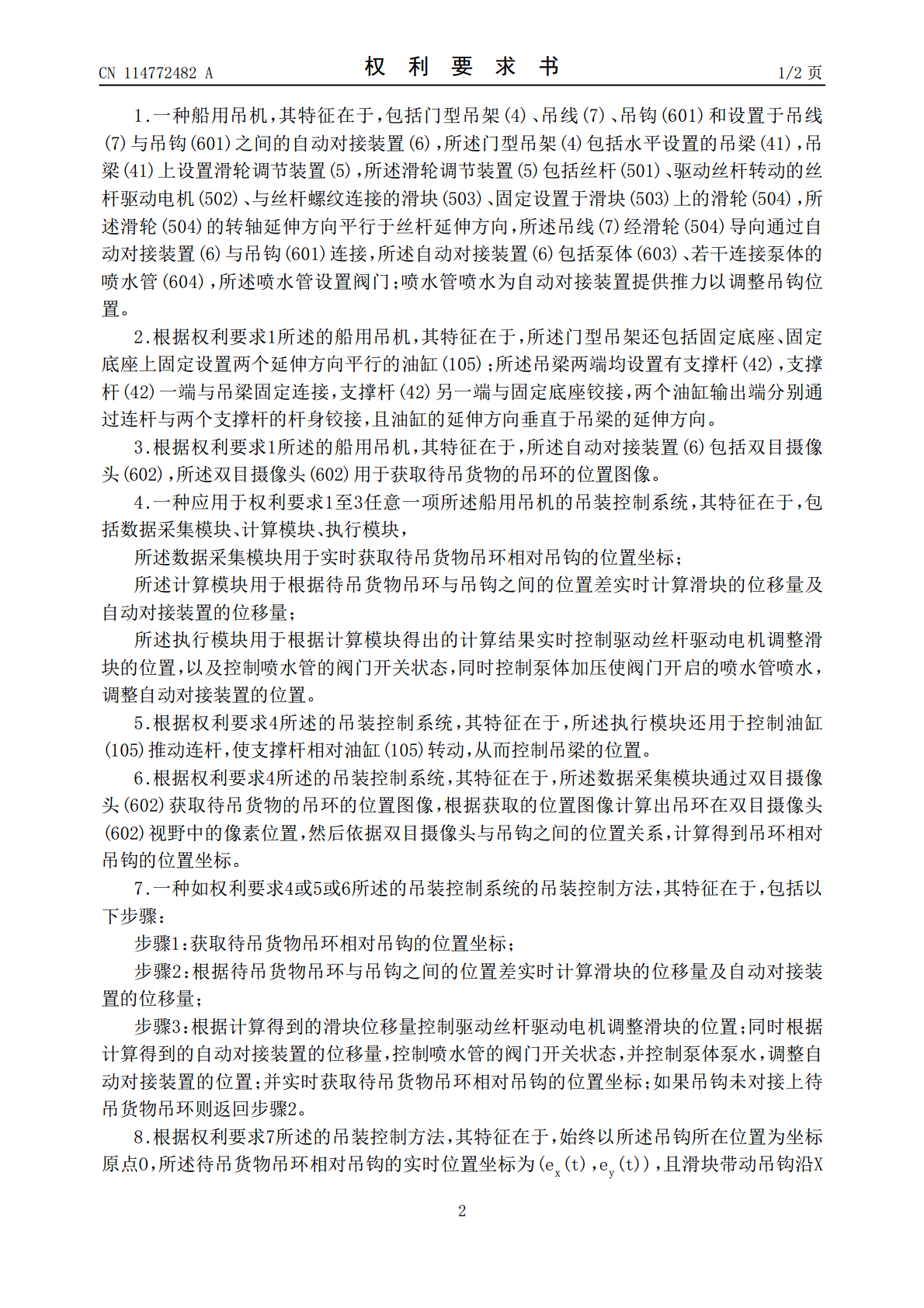
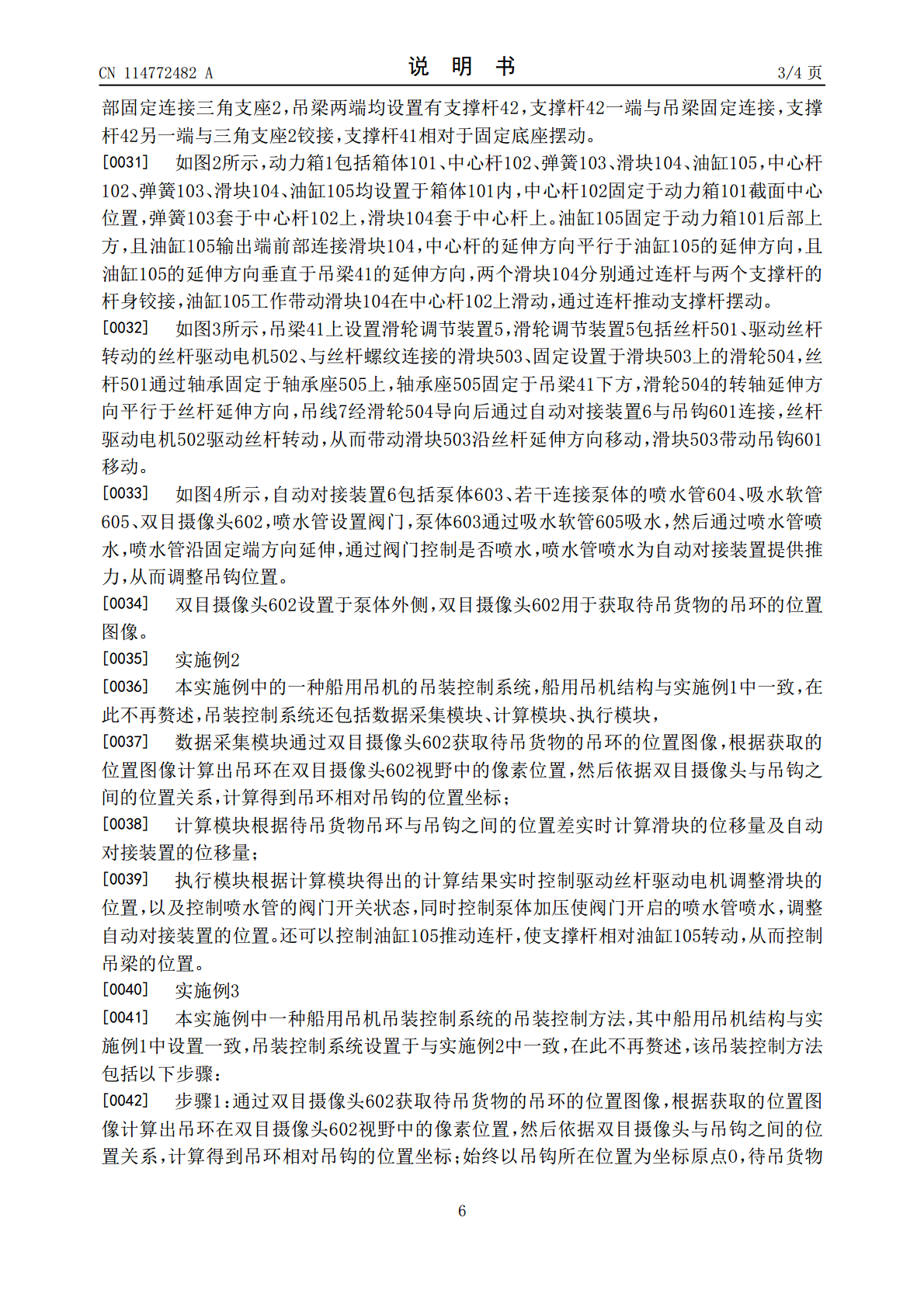
本发明公开了一种船用吊机及其吊装控制系统和吊装控制方法,船用吊机包括门型吊架、吊线、吊钩和设置于吊线与吊钩之间的自动对接装置,所述门型吊架包括水平设置的吊梁,吊梁上设置滑轮调节装置,所述滑轮调节装置包括丝杆、驱动丝杆转动的丝杆驱动电机、与丝杆螺纹连接的滑块、固定设置于滑块上的滑轮,所述滑轮的转轴延伸方向平行于丝杆延伸方向,所述吊线经滑轮导向通过自动对接装置与吊钩连接,所述自动对接装置包括泵体、若干连接泵体的喷水管,所述喷水管设置阀门。通过控制滑块和自动对接装置,调节吊钩的位置,实现吊钩自动对接待吊货物上的
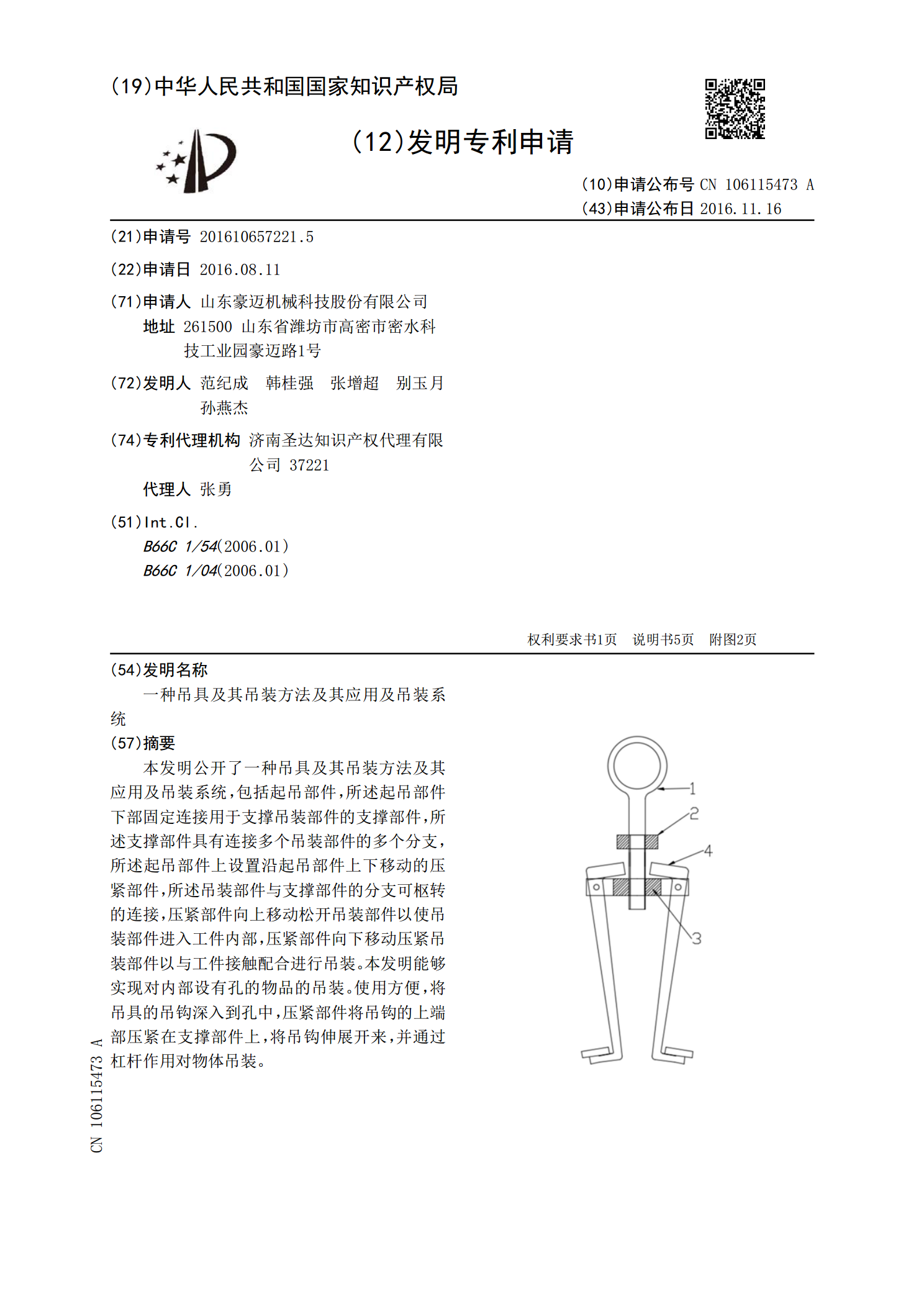
一种吊具及其吊装方法及其应用及吊装系统.pdf
本发明公开了一种吊具及其吊装方法及其应用及吊装系统,包括起吊部件,所述起吊部件下部固定连接用于支撑吊装部件的支撑部件,所述支撑部件具有连接多个吊装部件的多个分支,所述起吊部件上设置沿起吊部件上下移动的压紧部件,所述吊装部件与支撑部件的分支可枢转的连接,压紧部件向上移动松开吊装部件以使吊装部件进入工件内部,压紧部件向下移动压紧吊装部件以与工件接触配合进行吊装。本发明能够实现对内部设有孔的物品的吊装。使用方便,将吊具的吊钩深入到孔中,压紧部件将吊钩的上端部压紧在支撑部件上,将吊钩伸展开来,并通过杠杆作用对物体
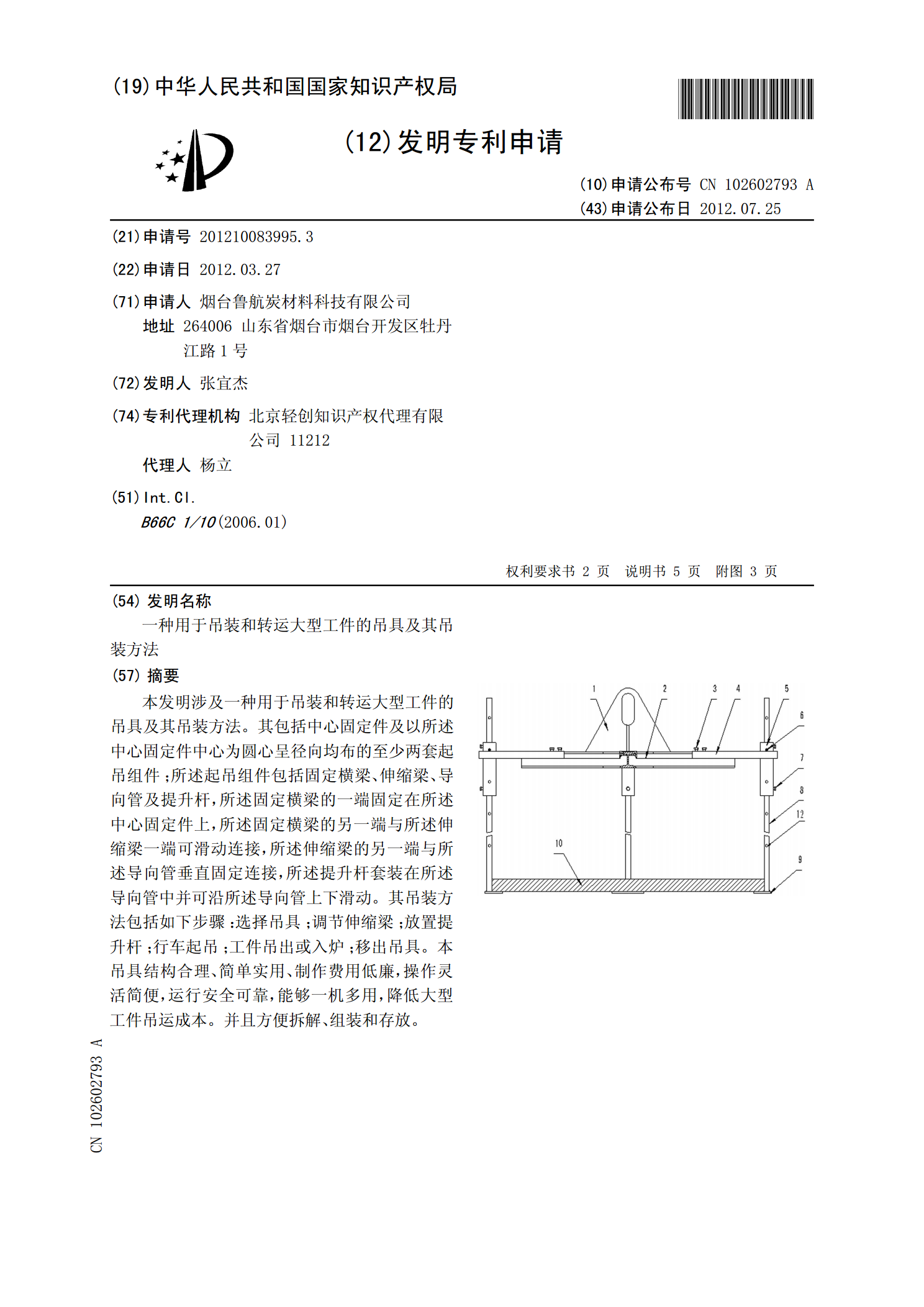
一种用于吊装和转运大型工件的吊具及其吊装方法.pdf
本发明涉及一种用于吊装和转运大型工件的吊具及其吊装方法。其包括中心固定件及以所述中心固定件中心为圆心呈径向均布的至少两套起吊组件;所述起吊组件包括固定横梁、伸缩梁、导向管及提升杆,所述固定横梁的一端固定在所述中心固定件上,所述固定横梁的另一端与所述伸缩梁一端可滑动连接,所述伸缩梁的另一端与所述导向管垂直固定连接,所述提升杆套装在所述导向管中并可沿所述导向管上下滑动。其吊装方法包括如下步骤:选择吊具;调节伸缩梁;放置提升杆;行车起吊;工件吊出或入炉;移出吊具。本吊具结构合理、简单实用、制作费用低廉,操作灵活

一种便携式吊机及其吊装方法.pdf
一种便携式吊机,包括自上而下依次连接的旋转臂、主立杆和基座,其特征在于:所述基座包括矩形平板状结构的基座本体和竖直设置在靠近基座本体短边一侧的下立杆;所述基座本体上远离下立杆的一侧设有用于放置车辆或工程机械的支腿或车轮的垫板。本发明通过在基座上设置与车辆或工程机械的支腿配合使用的垫板,进行吊装作业时可以将支腿直接压在垫板上作为吊机的配重使用,避免了传统需要单独设置吊机配重的弊端,且具有较高的安全可靠性和较强吊装能力。同时,旋转臂、主立杆和基座等主要组件之间采用法兰盘连接结构,仅需8颗螺栓即可完成现场组装,
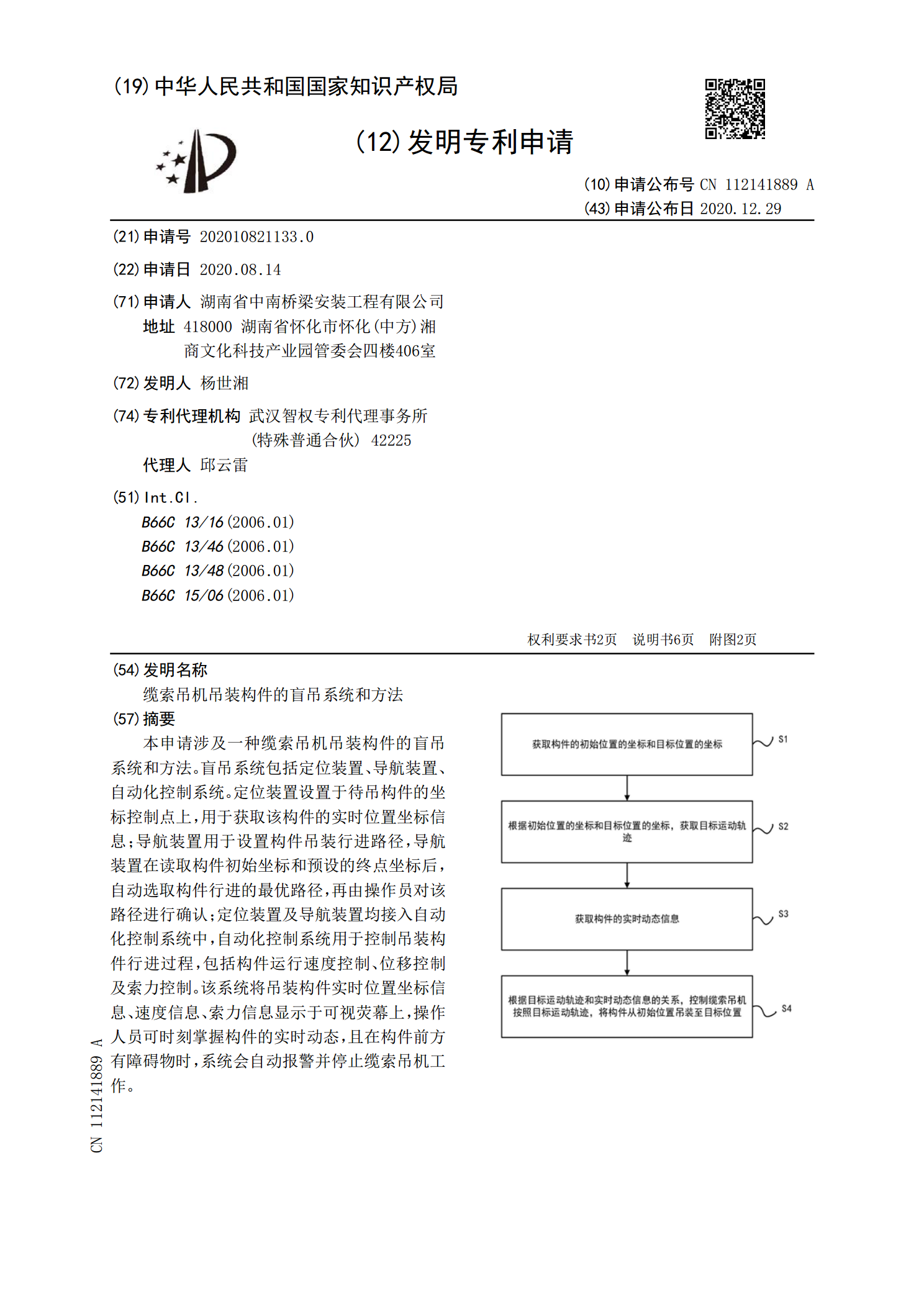
缆索吊机吊装构件的盲吊系统和方法.pdf
本申请涉及一种缆索吊机吊装构件的盲吊系统和方法。盲吊系统包括定位装置、导航装置、自动化控制系统。定位装置设置于待吊构件的坐标控制点上,用于获取该构件的实时位置坐标信息;导航装置用于设置构件吊装行进路径,导航装置在读取构件初始坐标和预设的终点坐标后,自动选取构件行进的最优路径,再由操作员对该路径进行确认;定位装置及导航装置均接入自动化控制系统中,自动化控制系统用于控制吊装构件行进过程,包括构件运行速度控制、位移控制及索力控制。该系统将吊装构件实时位置坐标信息、速度信息、索力信息显示于可视荧幕上,操作人员可时