
一种关节力矩传感器及机器人关节.pdf

雨巷****可歆

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种关节力矩传感器及机器人关节.pdf
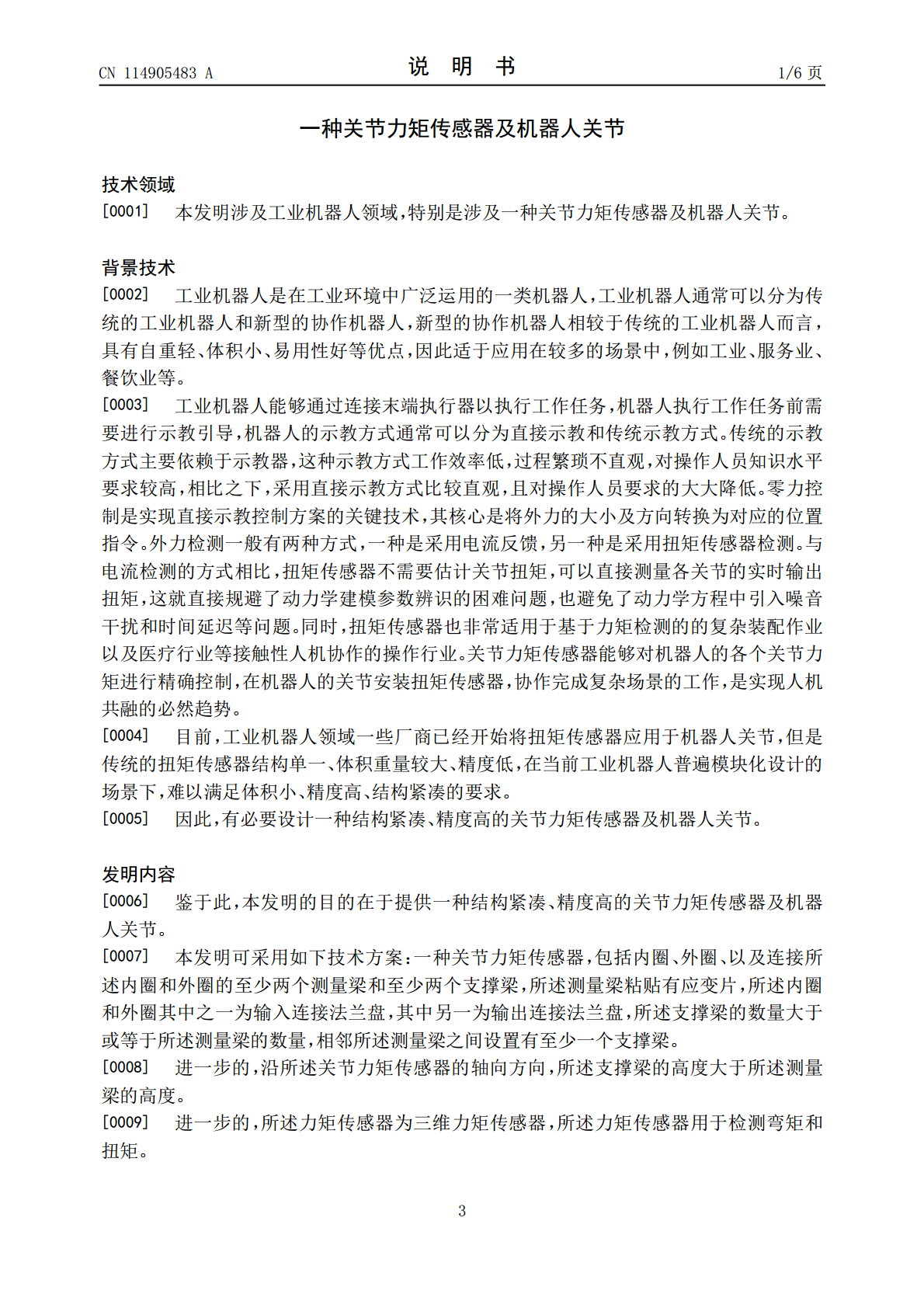
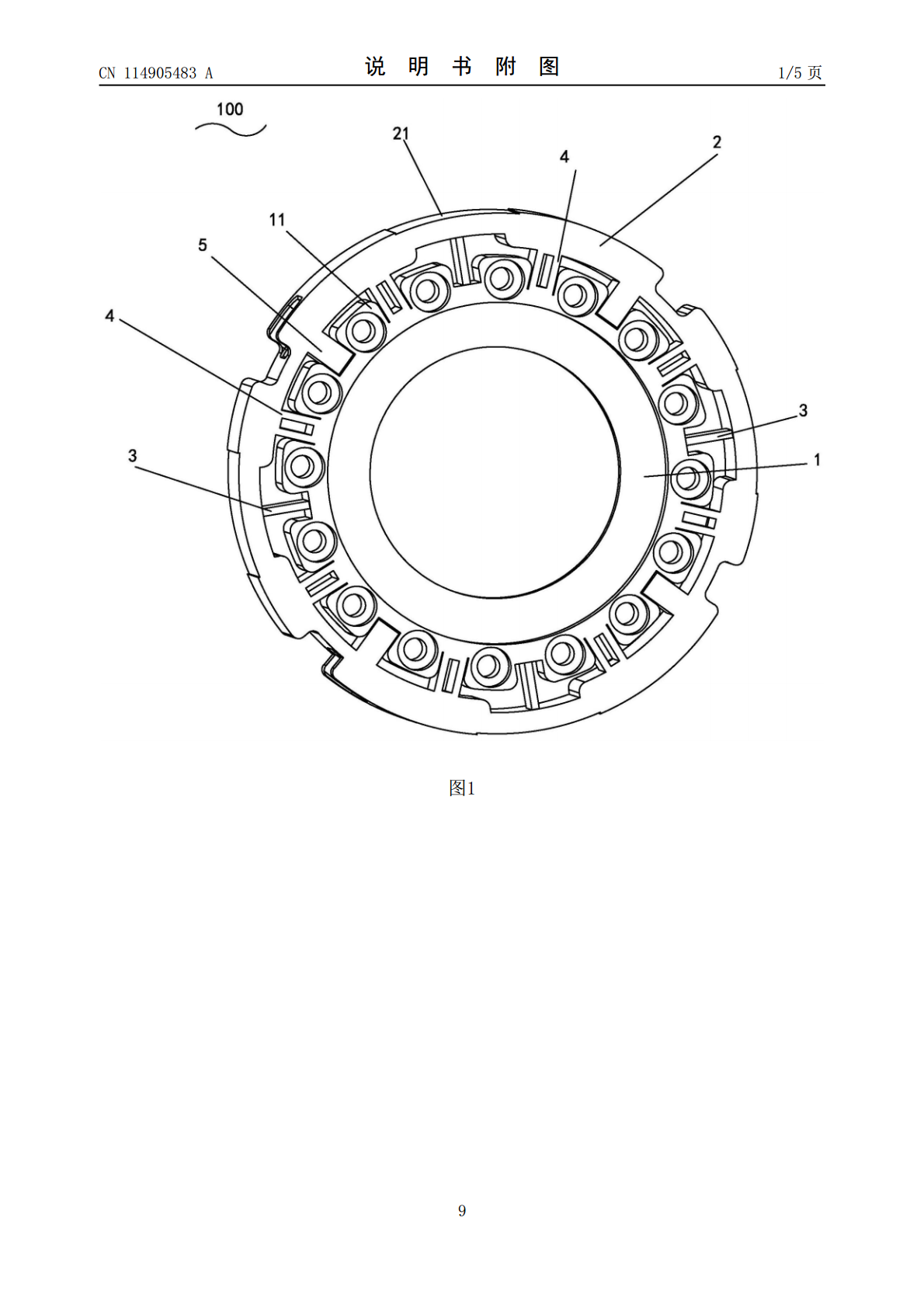
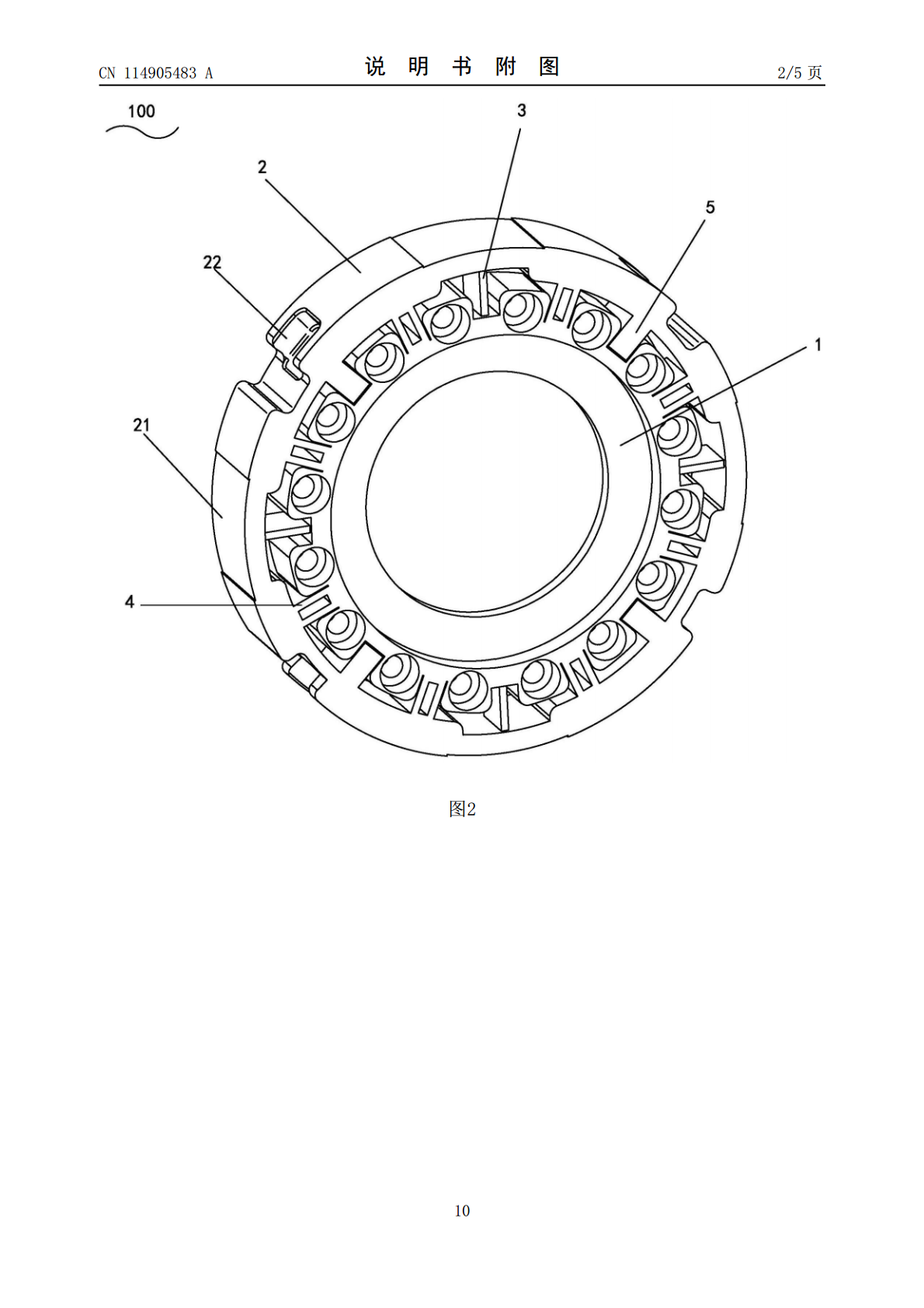
本发明涉及一种关节力矩传感器及机器人关节,所述关节力矩传感器包括内圈、外圈以及连接所述内圈和外圈的至少两个测量梁和至少两个支撑梁,所述测量梁粘贴有应变片,所述支撑梁用于增强所述关节力矩传感器的刚度,所述内圈和外圈其中之一为输入连接法兰盘,其中另一为输出连接法兰盘,所述支撑梁的数量大于或等于所述测量梁的数量,相邻所述测量梁之间设置有至少一个支撑梁。本发明的有益效果是:关节力矩传感器结构紧凑、精度高、抗过载能力强。

协作机器人关节力矩传感器的设计与研究.docx
协作机器人关节力矩传感器的设计与研究随着工业自动化技术不断发展,协作机器人逐渐进入人们的视野。协作机器人能够与人类共同完成工作,缩短了生产周期,提高了生产效率。而协作机器人的关节力矩传感器是其中一个非常重要的组成部分,它能够对协作机器人的关节施力情况进行监测和控制,保证机器人在工作过程中的稳定性和安全性。本文将介绍协作机器人关节力矩传感器的设计原理和研究进展。一、协作机器人关节力矩传感器的设计原理协作机器人关节力矩传感器是一种测量机械臂关节受力情况的装置。传感器根据机械臂关节处力矩的不同变化,利用传感器的

模块化机器人关节力矩传感器的研究.docx
模块化机器人关节力矩传感器的研究摘要本文介绍了模块化机器人关节力矩传感器的研究。机器人的关节力矩传感器可以测量机器人在关节处的力矩,是机器人控制系统的重要组成部分。本文介绍了机器人关节力矩传感器的原理、设计、制造等方面的研究进展。针对传统机器人传感器的缺点,本文提出了一种模块化机器人关节力矩传感器的设计方案,并对其进行了实验验证。实验结果表明,该传感器具有较好的稳定性和精度,可应用于机器人控制系统中。关键词:机器人;关节力矩传感器;模块化设计;实验验证1.引言机器人是一种智能化的操作系统,其特点是能够自主
一种机器人关节力矩平衡装置.pdf
本发明公开了一种机器人关节力矩平衡装置,包括偏心凸轮,所述偏心凸轮的中轴与RV减速机的输出端固定连接,机器人手臂固定在偏心凸轮上;多个平衡油缸,多个所述平衡油缸以偏心凸轮的对称轴线为轴对称的布置在偏心凸轮的两侧,平衡油缸的活动端抵靠在偏心凸轮的外轮廓上;液压油泵,所述液压油泵通过输油管路与多个所述平衡油缸相连接,用于驱动所述平衡油缸动作;角度编码器,用于检测所述偏心凸轮或者机器人手臂的角度信号;PLC,用于接收所述角度编码器发送的角度信号,并控制所述液压油泵动作。本发明的效果是:结构紧凑,占用空间小,平衡

基于应变片阵列的机器人变刚度关节力矩传感器研究.docx
基于应变片阵列的机器人变刚度关节力矩传感器研究近年来,随着机器人在工业、医疗和服务领域的广泛应用,对机器人的运动控制和力矩控制精度要求越来越高。因此,研究开发一种精度高、功能强大的机器人变刚度关节力矩传感器对于机器人控制和应用有着极为重要的意义。本文以基于应变片阵列技术的变刚度关节力矩传感器为研究对象,探究其研究现状、原理、结构、性能及应用等问题。一、研究现状变刚度关节力矩传感器是机器人控制领域中重要的传感器之一。目前,国内外学者对该领域的研究已经取得了一系列成果。国外主要研究机构包括麻省理工学院、南加州