
开关电源控制环路设计(初级篇).pdf

qw****27

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

开关电源控制环路设计(初级篇).pdf
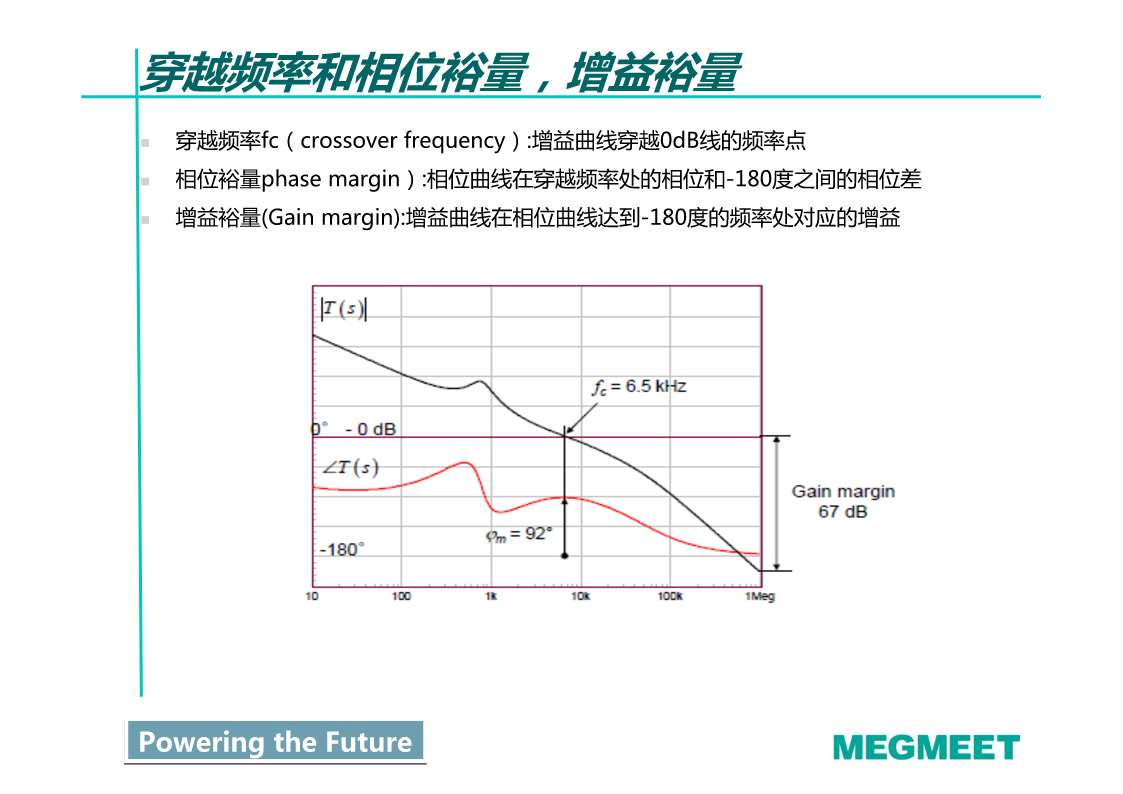
开关电源控制环路设计(初级篇)开关电源控制环路设计(初级篇)Preparedby:ChenXiaominMobile:13699791397Email:cxmmeg@megmeet.comDate:December30,2010Address:Shenzhen议程1、环路和直流稳压电源的关系2、与环路相关的基本概念波特图,环路稳定性判据,传递函数,零极点3、常用的补偿控制器PI,TypeII,TypeIII控制器(s域的传递函数,波特图)4、模拟环路设计流程4.1收集系统参数(输入电压,输出电压,输出电感

开关电源控制环路设计读书笔记.docx
《开关电源控制环路设计》读书笔记一、书籍基本信息书籍简介:《开关电源控制环路设计》是一本关于开关电源设计领域的专业书籍,重点介绍了开关电源控制环路的设计原理、方法、技巧及实际应用。本书内容涵盖了开关电源的基本概念、控制环路的基本原理、设计步骤、性能优化以及相关的注意事项等,是电子工程师和电源设计师不可或缺的技术参考资料。1.书籍名称:《开关电源控制环路设计》在我探索电子工程领域的过程中,一本名为《开关电源控制环路设计》的书籍引起了我的极大兴趣。这本书深入探讨了开关电源控制环路设计的原理、技术和应用,为我打

开关电源的环路设计及仿真.doc
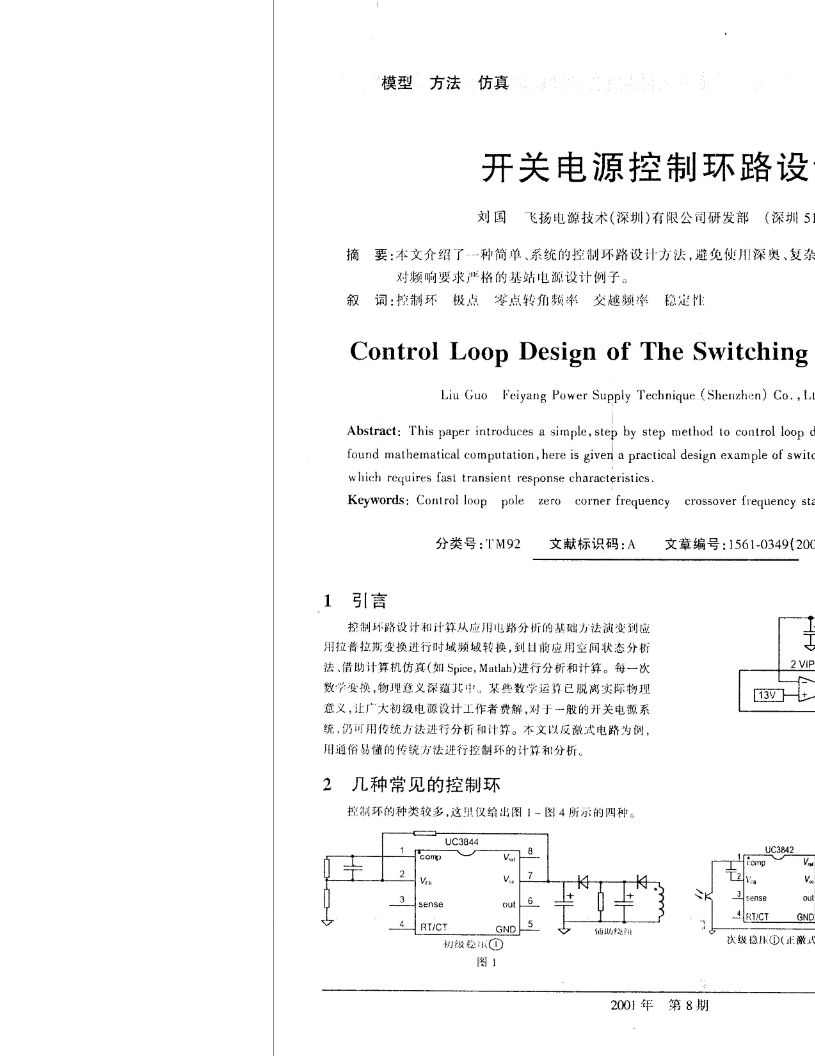
开关电源的环路设计及仿真(完整版)实用资料(可以直接使用,可编辑完整版实用资料,欢迎下载)基于UC3844的反激式开关电源控制环路设计实例管晓磊哈尔滨九洲电气股份,黑龙江哈尔滨150081摘要:电流型控制芯片UC3844已经广泛应用在开关电源中,本文是基于UC3844设计的控制环路,阐述了反激式开关电源控制环路的一般方法。关键词:控制环路设计UC3844反激开关电源引言在开关电源的设计过程中,控制环路的设计至关重要,控制环路的设计可以决定电源的成败与否。开关电源的控制方式有电流控制方式和电压控制方式两种。
经典中文版 开关电源控制环路设计.pdf
开关电源负反馈环路的设计.pdf
开关电源负反馈环路的设计司振范管Q.的导通、截止,将Vjn变成高频方波电摘要压此电压经变压器降压后,再由二极管D、D整流,经L—C滤波,最后输出所需要本文运用自动控制原理分析了开关电源的平滑的电压V。工作状态,使电源稳定工作的方法、积分环取样网络从输出端取出部分电压加到误和微分环的设计及元件的选择。差放大器反相输入端,与基准电压比较。放一、开关电源的工作原大后,加刊脉冲形成电路,与三角波电压相比较,形成宽度可调节的脉冲方波,经功率理及等效电路放大后,驱动开关管q,从而保证了在外电本文所分析的开关电源是将市