
俄罗斯火花车载雷达测速仪.doc

kp****93


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

俄罗斯火花车载雷达测速仪.doc
俄罗斯火花M雷达测速仪型号:ISKRA-M型雷达结构特性:独一无二的重量(220克)及尺寸.世界上最迷你的速度传感器之一.标准的,广泛适用的连接COM-port的DB9接口(可以使用其他厂家的数据线).独创的安全,方便设计.传感器外壳由耐冲击ABC塑料制成(品牌NOVODUR).两种固定方式:可移动的-利用VELCRO带固定,固定的-用固定螺丝固定.雷达的主要功能及可能性:通过两个接口:USB或者RS-232中的任意一个与外部设备交换数据(根据订购者的选择).新的处理信号的三种模式的计算法.保证在巡逻车运
一种带避震功能的车载雷达测速仪.pdf
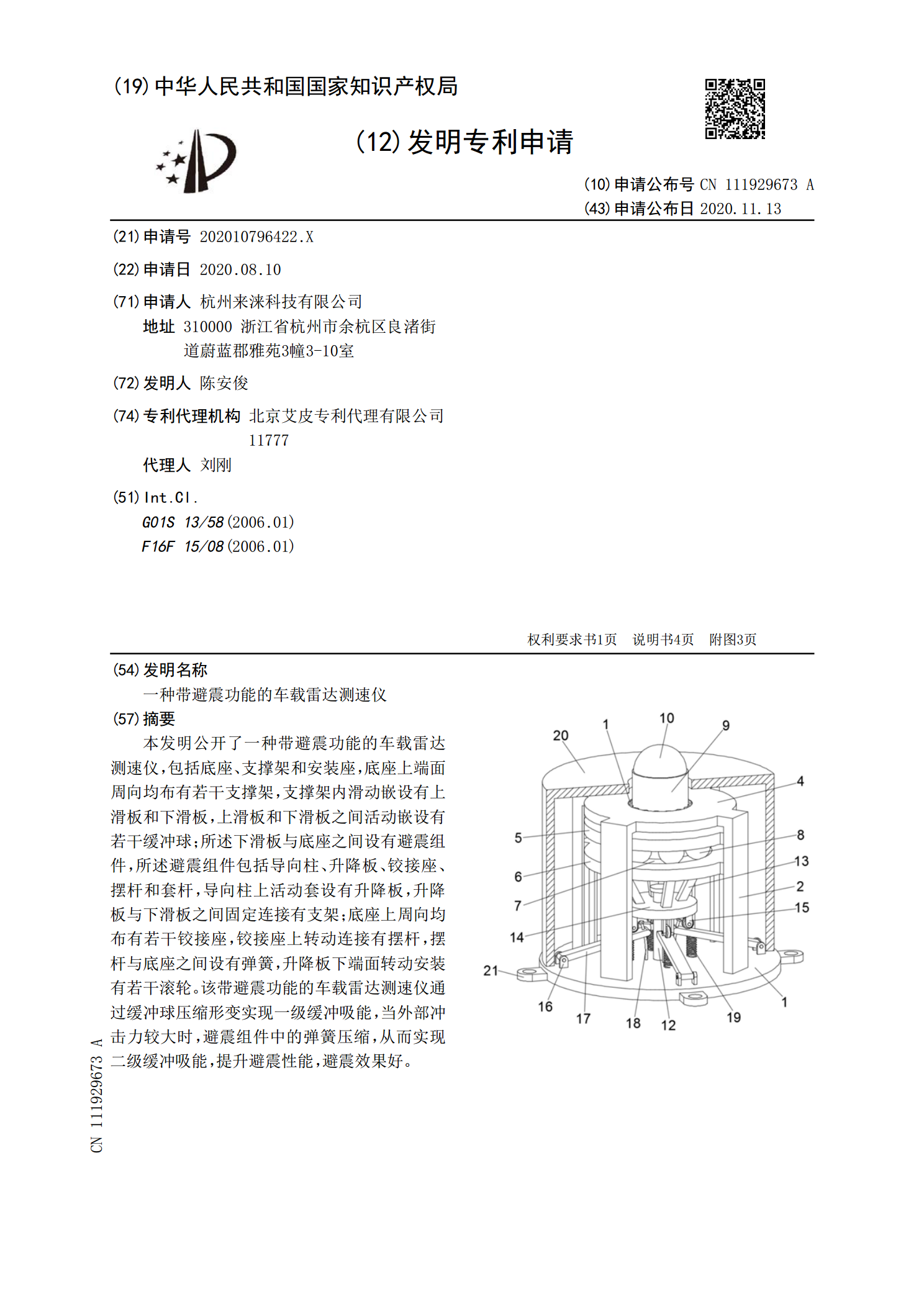
本发明公开了一种带避震功能的车载雷达测速仪,包括底座、支撑架和安装座,底座上端面周向均布有若干支撑架,支撑架内滑动嵌设有上滑板和下滑板,上滑板和下滑板之间活动嵌设有若干缓冲球;所述下滑板与底座之间设有避震组件,所述避震组件包括导向柱、升降板、铰接座、摆杆和套杆,导向柱上活动套设有升降板,升降板与下滑板之间固定连接有支架;底座上周向均布有若干铰接座,铰接座上转动连接有摆杆,摆杆与底座之间设有弹簧,升降板下端面转动安装有若干滚轮。该带避震功能的车载雷达测速仪通过缓冲球压缩形变实现一级缓冲吸能,当外部冲击力较大

雷达测速仪与激光测速仪区别.doc
(完整版)雷达测速仪与激光测速仪区别(完整版)雷达测速仪与激光测速仪区别(完整版)雷达测速仪与激光测速仪区别雷达测速仪与激光测速仪区别测速仪在交通执法中的应用:目前我国较多采用的测速方式有雷达测速、激光测速、地感线圈测速方式、视频测速和红外线检测。目前,运用最多的还是雷达测速和激光测速这两种。一、最大的区别—原理不同激光测速的原理是用过发射和接收激光光束来计算时间差,从而来确定被测物体与测试点的距离。激光测速是对被测物体进行两次有特定时间间隔的激光测距,取得在该时段内被测物体的移动距离,从而得到该被测物体

新型雷达测速仪.pdf
本发明公开了一种新型雷达测速仪,包括:第一控制箱体、雷达本体、保护罩、摄像头以及支撑机构;雷达本体设置在第一控制箱体上,摄像头通过支撑柱设置在第一控制箱体的上表面,摄像头上设置有保护罩,第一控制箱体固定在支撑机构上;支撑机构包括:自上而下依次连接的固定台、旋转柱、第二控制箱体、连接台以及多根支撑脚,第二控制箱体内设置有驱动电机,驱动电机通过传动齿轮与旋转柱相连。该新型雷达测速仪克服现有技术中的雷达测速仪在户外长期使用时,摄像头上容易积灰,影响拍摄效果,需要人工清理,操作不便捷,且现有的雷达测速仪支架都是比

雷达测速仪工作原理.doc
雷达测速仪简介雷达测速仪是通过微波来测量运动物体的速度,其工作理论是基于多普勒原理,既当微波照射到运动的物体上时,会产生一个与运动物体速度成比率的一个变化,其变化大小正比于物体运动的速度。雷达发射的微波以一个扇型的方式出去(S1),在照射区域内的目标会对微波形成一个反射(S2),其中依据实际测量的要求,雷达又分为两种工作模式:一种是静态工作模式,一种是动态工作模式。所谓静态:即雷达静止不动(不在运动的巡逻车内),测迎面来的汽车或同向远离的汽车。所谓动态:既雷达处于运动状态(一般在运动的巡逻车内),测迎面来