
一种无人驾驶汽车及其控制系统.pdf

春兰****89


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人驾驶汽车及其控制系统.pdf
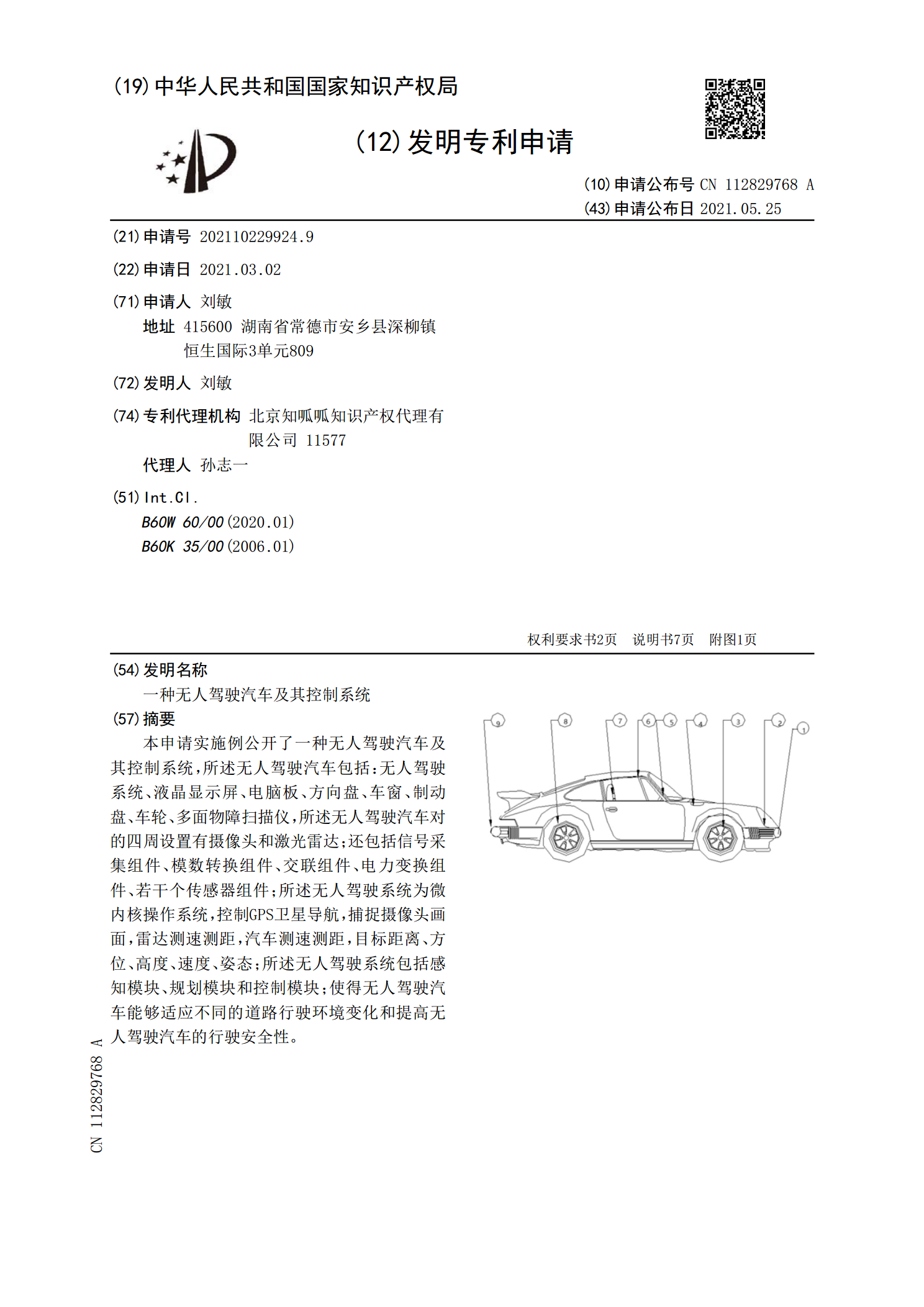
本申请实施例公开了一种无人驾驶汽车及其控制系统,所述无人驾驶汽车包括:无人驾驶系统、液晶显示屏、电脑板、方向盘、车窗、制动盘、车轮、多面物障扫描仪,所述无人驾驶汽车对的四周设置有摄像头和激光雷达;还包括信号采集组件、模数转换组件、交联组件、电力变换组件、若干个传感器组件;所述无人驾驶系统为微内核操作系统,控制GPS卫星导航,捕捉摄像头画面,雷达测速测距,汽车测速测距,目标距离、方位、高度、速度、姿态;所述无人驾驶系统包括感知模块、规划模块和控制模块;使得无人驾驶汽车能够适应不同的道路行驶环境变化和提高无人

一种无人驾驶汽车自动充电装置及其控制系统.pdf
本发明公开了一种无人驾驶汽车自动充电装置及其控制系统,包括充电棚和安装在汽车边部的充电承接机构,通过充电棚对汽车进行充电,可对雨水进行遮挡,提高充电安全性,汽车可从任意方向进入充电棚内,只需移动到充电棚下,利用摄像头定位汽车的位置,再通过电动轨道车和第一伸缩臂的作用,带动充电座绕汽车进行移动,利用红外线发射器识别汽车上的红外线接收点,自动搜寻充电口,再通过第二伸缩臂带动充电插座于充电口对接进行自动充电,无论汽车在充电棚下处于什么姿态,无论充电口处于汽车边部什么位置,均可自动识别和自动对接,提高装置的适用范

一种汽车无人驾驶模式的控制系统及方法.pdf
本发明涉及汽车无人驾驶技术领域,公开了一种汽车无人驾驶模式的控制系统及方法,所述的控制系统包括环境感知模块、横向控制模块、纵向控制模块、中心控制模块、行为数据采集模块和决策执行模块。本发明设有的行为数据采集模块,通过CAN总线与中心控制模块和决策执行模块连接,在人工驾驶模式下接收决策执行模块的特征信息,并通过构建人工神经网络模型获取在不同行驶工况下的最佳行为参数,并将获取的最佳行为参数与执行反馈信息进行数据融合,生成具有人类驾驶特性的决策指令用于控制决策执行模块,使其控制结果及控制过程更加接近于人工驾驶模

一种无人驾驶汽车速度控制系统.pdf
本发明公开了汽车速度控制技术领域的一种无人驾驶汽车速度控制系统,包括路况识别模块,用于识别当前道路的路况信息;车速检测模块,用于检测当前车辆的速度信息;决策模块,用于获取驾驶人员以及乘客的驾驶风格信息;通信模块,用于路况识别模块、车速检测模块、障碍物检测模块和决策模块与处理模块通信,处理模块与执行模块通信;处理模块,上述模块采集信息得出应对障碍物时的驾驶策略;并将驾驶策略发送至执行模块;行模块,用于接收驾驶策略,并执行驾驶策略,控制车辆。本发明构建出应对障碍物的不同驾驶策略,在保证驾驶安全的前提下,为驾驶
一种无人驾驶的智能汽车及其控制方法.pdf
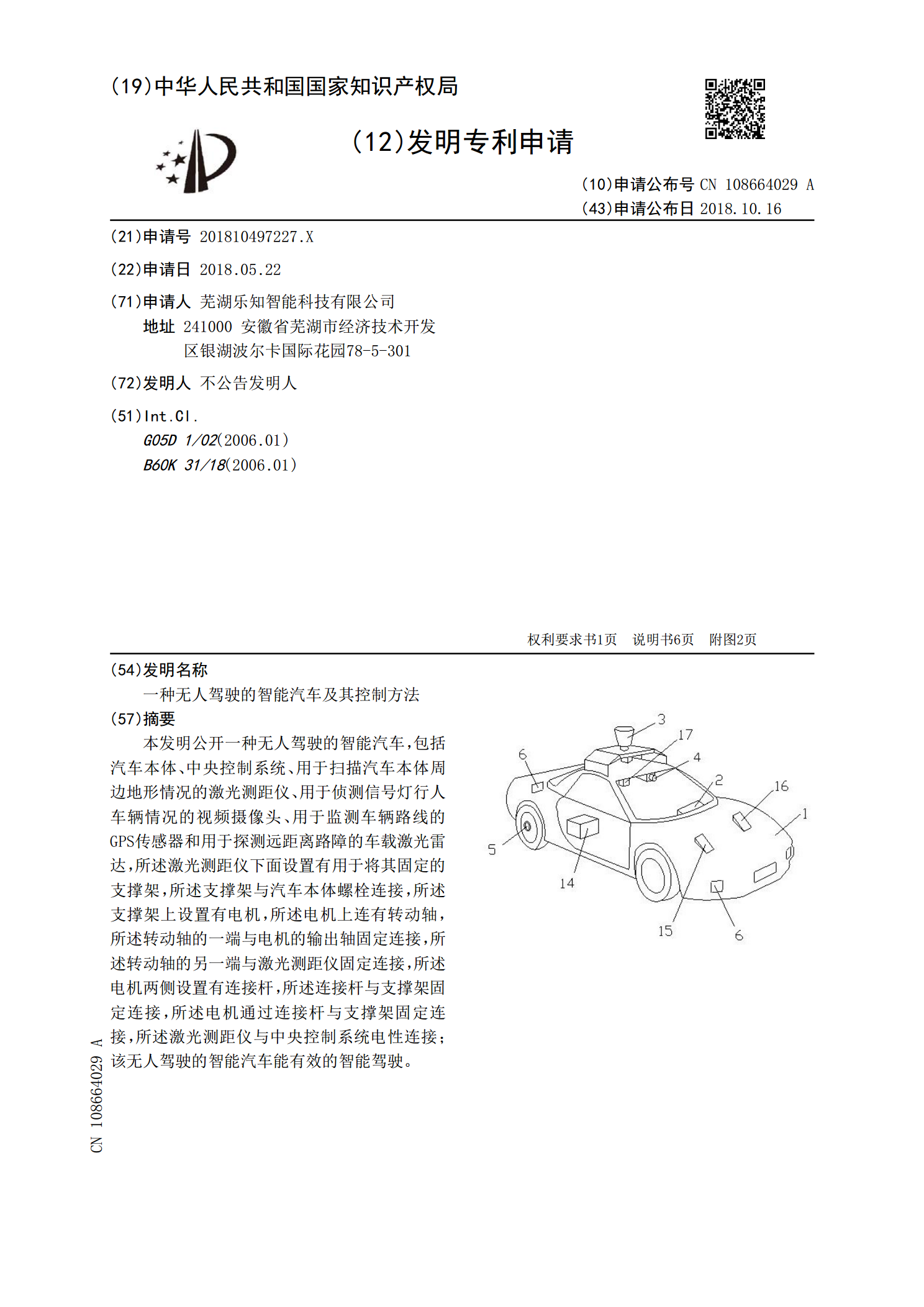
本发明公开一种无人驾驶的智能汽车,包括汽车本体、中央控制系统、用于扫描汽车本体周边地形情况的激光测距仪、用于侦测信号灯行人车辆情况的视频摄像头、用于监测车辆路线的GPS传感器和用于探测远距离路障的车载激光雷达,所述激光测距仪下面设置有用于将其固定的支撑架,所述支撑架与汽车本体螺栓连接,所述支撑架上设置有电机,所述电机上连有转动轴,所述转动轴的一端与电机的输出轴固定连接,所述转动轴的另一端与激光测距仪固定连接,所述电机两侧设置有连接杆,所述连接杆与支撑架固定连接,所述电机通过连接杆与支撑架固定连接,所述激光