
位置检测装置-脉冲编码器-光栅资料.pptx

17****92

1/10

2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

位置检测装置-脉冲编码器-光栅资料.pptx
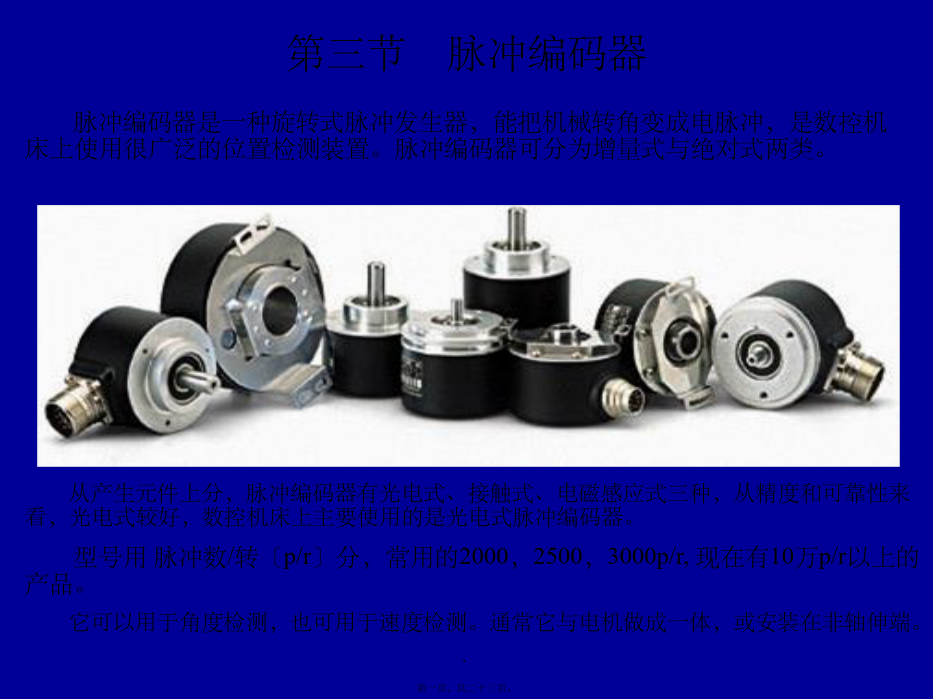
第三节脉冲编码器由图可以看出,码道的圈数就是二进制的位数,且高位在内,低位在外。其分辨角θ=360o/24=22.5o,假设是n位二进制码盘,就有n圈码道,分辨角θ=360o/2n,码盘位数越大,所能分辨的角度越小,测量精度越高。假设要提高分辨力,就必须增多码道,即二进制位数增多。目前接触式码盘一般可以做到9位二进制,光电式码盘可以做到18位二进制。在数控机床上,光电脉冲编码器作为位置检测装置,用在数字比较伺服系统中,将位置检测信号反响给CNC装置。光电脉冲编码器用于数字脉冲比较伺服系统〔图5-17〕的工

【精编医学资料】位置检测装置-脉冲编码器-光栅资料.pptx
第三节脉冲编码器由图可以看出码道的圈数就是二进制的位数且高位在内低位在外。其分辨角θ=360o/24=22.5o假设是n位二进制码盘就有n圈码道分辨角θ=360o/2n码盘位数越大所能分辨的角度越小测量精度越高。假设要提高分辨力就必须增多码道即二进制位数增多。目前接触式码盘一般可以做到9位二进制光电式码盘可以做到18位二进制。在数控机床上光电脉冲编码器作为位置检测装置用在数字比较伺服系统中将位置检测信号反响给

最新精编医学专题—位置检测装置-脉冲编码器-光栅资料.ppt
第三节脉冲(màichōng)编码器由图可以看出(kànchū)码道的圈数就是二进制的位数且高位在内低位在外。其分辨角θ=360o/24=22.5o若是n位二进制码盘就有n圈码道分辨角θ=360o/2n码盘位数越大所能分辨的角度越小测量精度越高。若要提高分辨力就必须增多码道即二进制位数增多。目前接触式码盘一般可以做到9位二进制光电式码盘可以做到18位二进制。在数控机床上光电脉冲编码器作为位置检测装置用在数字

基于光栅编码器对开关磁阻电机的位置和速度的检测.docx
基于光栅编码器对开关磁阻电机的位置和速度的检测随着实时控制技术的发展,开关磁阻电机在许多行业中被广泛使用。开关磁阻电机具有低噪音、低振动、高效率以及快速响应的特点,因此在工业控制、医疗器械、电器、自动化等领域中得到了广泛应用。开关磁阻电机具有简单的结构,只需要控制电流的通过,便可使转子旋转,从而完成动力传输。因此,对于开关磁阻电机的位置和速度的检测尤为重要。无论是用于闭环控制的精准定位,还是监测电机的输出速度和负载变化,都需要对电机的位置和速度进行准确检测,并及时反馈到控制系统中,以便于控制系统实时地对电
位置编码器装置.pdf
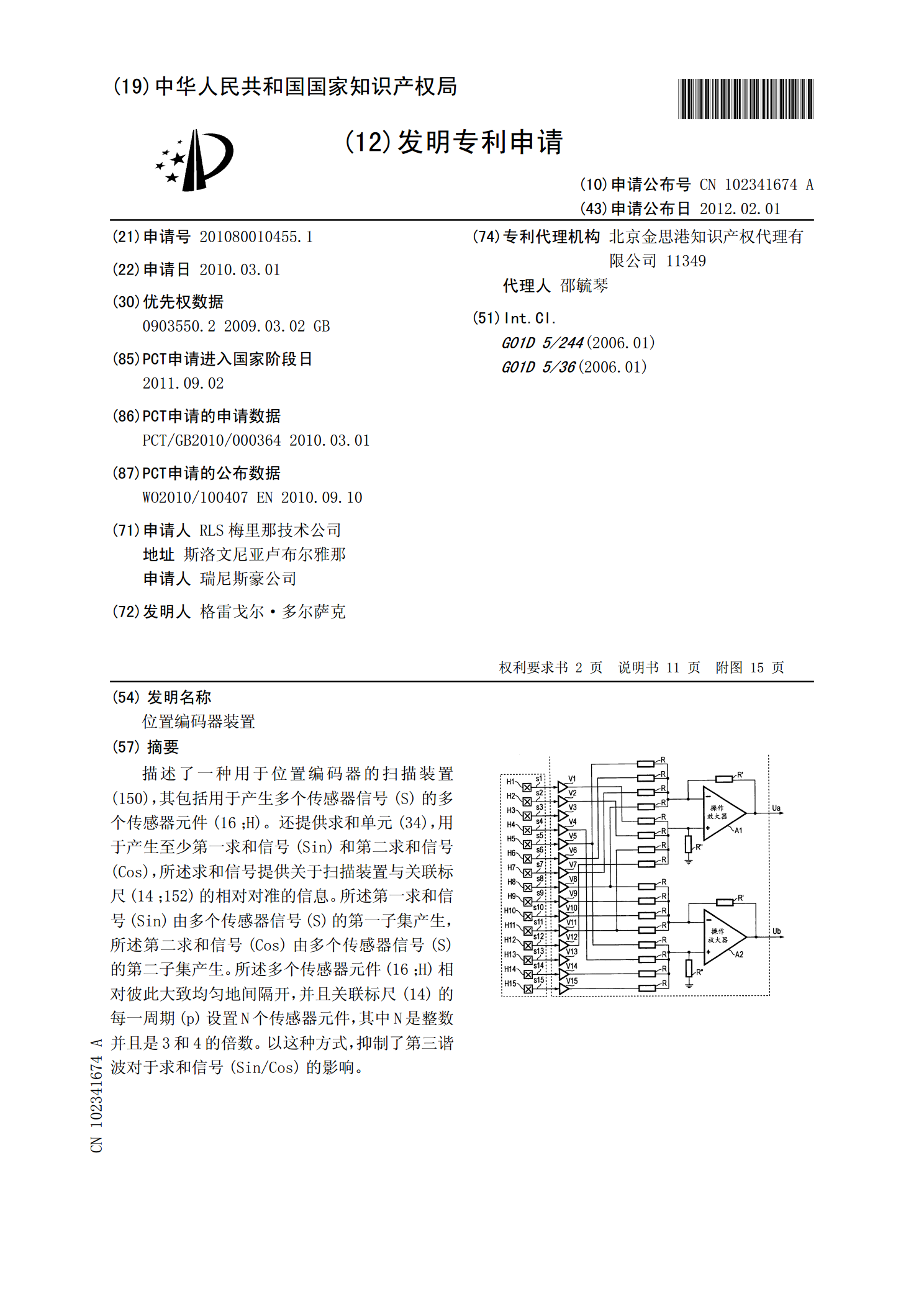
描述了一种用于位置编码器的扫描装置(150),其包括用于产生多个传感器信号(S)的多个传感器元件(16;H)。还提供求和单元(34),用于产生至少第一求和信号(Sin)和第二求和信号(Cos),所述求和信号提供关于扫描装置与关联标尺(14;152)的相对对准的信息。所述第一求和信号(Sin)由多个传感器信号(S)的第一子集产生,所述第二求和信号(Cos)由多个传感器信号(S)的第二子集产生。所述多个传感器元件(16;H)相对彼此大致均匀地间隔开,并且关联标尺(14)的每一周期(p)设置N个传感器元件,其中