
基于再制造系统的MIG表面堆焊机器人的轨迹规划.doc

kp****93


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于再制造系统的MIG表面堆焊机器人的轨迹规划.doc
基于再制造系统的MIG表面堆焊机器人的轨迹规划摘要:基于再制造系统的机器人可以扫描出磨损部分,以及制定出于标准模式相比较的相应的模式,计算焊缝沉积物,执行焊缝的规划轨迹,并且依靠MIG自动焊接修复磨损部分。这张纸研究的是在校正,扫描和模式重建后的焊缝轨迹规划。下面的方面包括:介绍规划原理,基于焊缝参数(流量和速度)选择合适的焊接步骤,通过叠加的方法计算焊缝的重叠程度,还有已经证明了的通过最优化的参数可以获得好的焊缝侧面轮廓。关键词:基于再制造系统的机器人、轨迹规划、焊缝参数、焊接重叠0引言焊接是再制造的关

面向表面制造的机器人工具轨迹规划方法.docx
面向表面制造的机器人工具轨迹规划方法随着制造业技术的日益发展,越来越多的工业机器人被应用于表面制造任务中。机器人工具轨迹规划是实现自动化表面制造过程中的关键问题之一。本文将探讨机器人工具轨迹规划的方法,主要关注面向表面制造的应用。一、机器人工具轨迹规划的基本问题机器人的工具轨迹规划问题主要涉及以下几个方面:机器人控制、轨迹生成和路径规划。机器人控制是指机器人如何进行操作,包括机器人末端执行器的运动、传感器的数据采集和控制系统的反馈等;轨迹生成是指机器人末端执行器的轨迹如何生成,主要是通过相应的数学和物理模
基于径向偏置的机器人堆焊复杂外形工件的轨迹规划方法.pdf
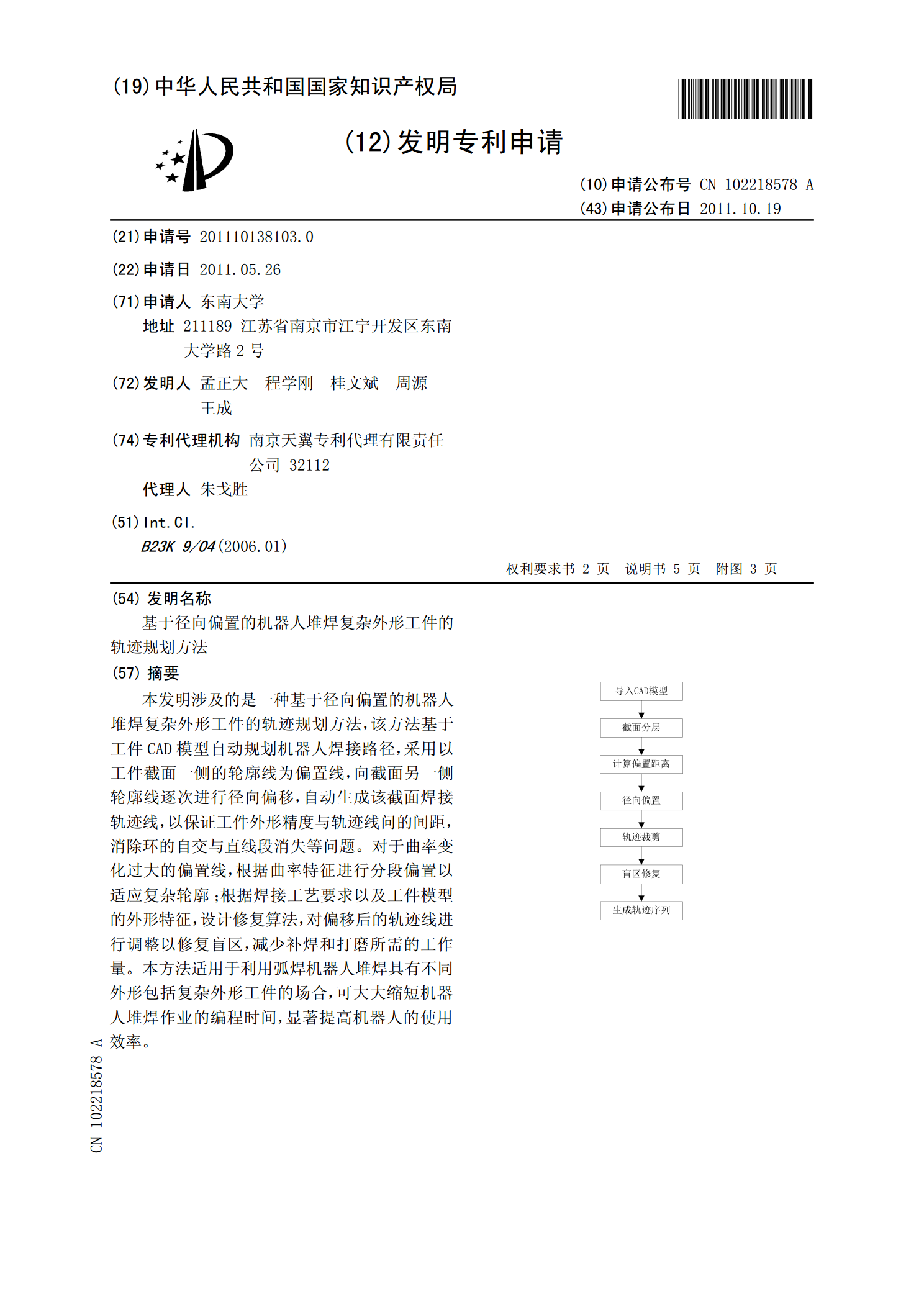
本发明涉及的是一种基于径向偏置的机器人堆焊复杂外形工件的轨迹规划方法,该方法基于工件CAD模型自动规划机器人焊接路径,采用以工件截面一侧的轮廓线为偏置线,向截面另一侧轮廓线逐次进行径向偏移,自动生成该截面焊接轨迹线,以保证工件外形精度与轨迹线问的间距,消除环的自交与直线段消失等问题。对于曲率变化过大的偏置线,根据曲率特征进行分段偏置以适应复杂轮廓;根据焊接工艺要求以及工件模型的外形特征,设计修复算法,对偏移后的轨迹线进行调整以修复盲区,减少补焊和打磨所需的工作量。本方法适用于利用弧焊机器人堆焊具有不同外形

面向表面制造的机器人工具轨迹规划方法的中期报告.docx
面向表面制造的机器人工具轨迹规划方法的中期报告一、研究背景随着工业自动化的发展,机器人在工业生产中的应用越来越广泛。其中,面向表面制造的机器人工具是一种能够在材料表面上进行切削、打磨、抛光等操作的机器人工具。机器人工具运动路径的规划是实现机器人自主运动控制的关键技术之一。针对面向表面制造的机器人工具,需要设计一种适合的规划方法,能够让机器人工具在表面上均匀地运动,达到高质量的制造效果。二、研究现状目前,已经有一些针对机器人工具轨迹规划的算法被提出。其中,较为常见的方法是基于机器人工具的路径规划算法,针对机

堆焊再制造层表面质量的分形表征方法.docx
堆焊再制造层表面质量的分形表征方法堆焊再制造是一种重要的表面改性技术,可以有效提高材料的耐磨、耐蚀和抗疲劳性能。在堆焊再制造过程中,所形成的再制造层表面质量是评价该技术效果的重要指标。然而,传统的表面质量评价方法存在着一些局限性,如主观性、不可重复性等问题。为了克服这些问题,需要探索一种更加客观、准确和可重复的表征方法。分形几何学作为一种新兴的数学工具,已被广泛应用于多领域的表面质量分析中。分形几何学的基本思想是通过计算表面的几何特征参数,揭示其自相似性和不规则性。因此,将分形几何学应用于堆焊再制造层表面