
点云数据的轨道提取方法、系统及介质.pdf

高格****gu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
点云数据的轨道提取方法、系统及介质.pdf
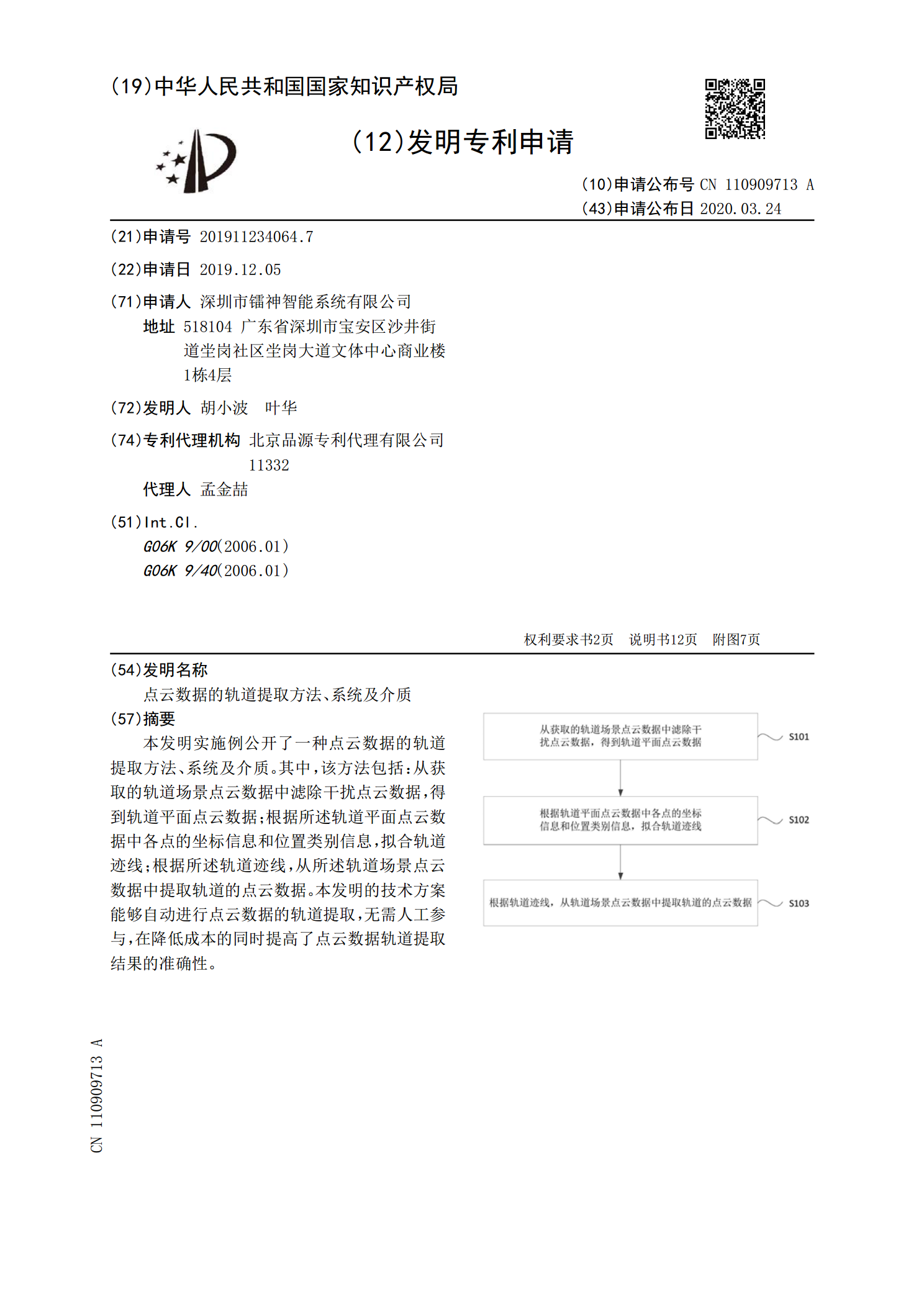
本发明实施例公开了一种点云数据的轨道提取方法、系统及介质。其中,该方法包括:从获取的轨道场景点云数据中滤除干扰点云数据,得到轨道平面点云数据;根据所述轨道平面点云数据中各点的坐标信息和位置类别信息,拟合轨道迹线;根据所述轨道迹线,从所述轨道场景点云数据中提取轨道的点云数据。本发明的技术方案能够自动进行点云数据的轨道提取,无需人工参与,在降低成本的同时提高了点云数据轨道提取结果的准确性。
点云数据提取方法、装置、系统、设备及存储介质.pdf
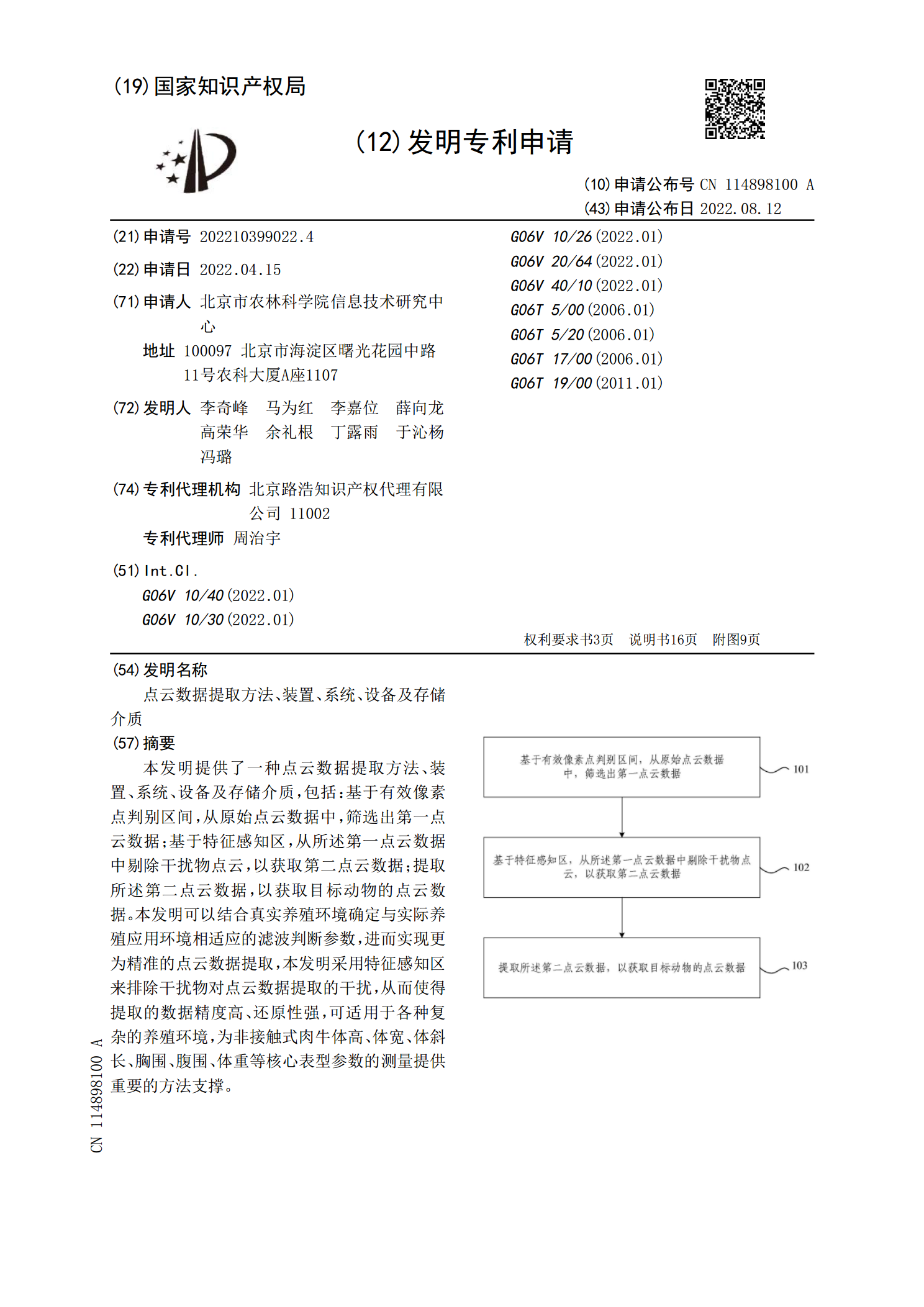
本发明提供了一种点云数据提取方法、装置、系统、设备及存储介质,包括:基于有效像素点判别区间,从原始点云数据中,筛选出第一点云数据;基于特征感知区,从所述第一点云数据中剔除干扰物点云,以获取第二点云数据;提取所述第二点云数据,以获取目标动物的点云数据。本发明可以结合真实养殖环境确定与实际养殖应用环境相适应的滤波判断参数,进而实现更为精准的点云数据提取,本发明采用特征感知区来排除干扰物对点云数据提取的干扰,从而使得提取的数据精度高、还原性强,可适用于各种复杂的养殖环境,为非接触式肉牛体高、体宽、体斜长、胸围、

基于点云数据的平面提取方法、系统、装置及存储介质.pdf
本申请公开了一种基于点云数据的平面提取方法,从点云数据中恢复得到数据格网和既定扫描线,并基于此构建得到另外的伪扫描线,之后再利用线简化算法去除扫描线中不必要的点,得到保留下来的特征点,并基于特征点将原扫描线拆分为各扫描线段,以各扫描线段的主方向为参考依据进行聚类处理,得到由线特征组成的各平面碎片,最后将拥有相同或相似法向且存在重叠区域的平面碎片进行合并得到目标平面。通过以线特征的方式摆脱了现有算法对高点云密度的依赖,同时也能够显著减少法向对比的次数,提升了效率。本申请还同时公开了一种感兴趣区域确定装置、设
点云数据的目标检测方法、系统及介质.pdf
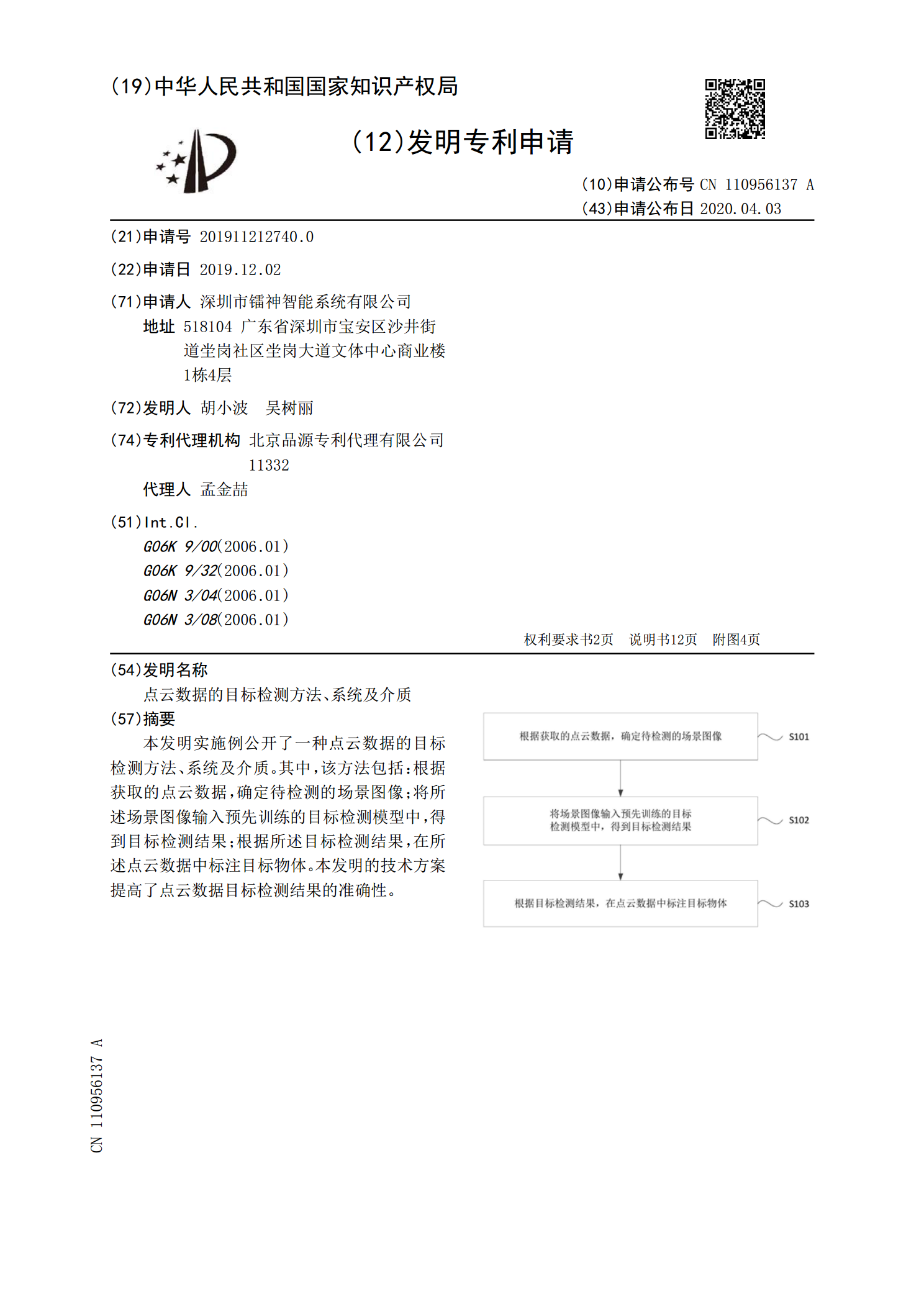
本发明实施例公开了一种点云数据的目标检测方法、系统及介质。其中,该方法包括:根据获取的点云数据,确定待检测的场景图像;将所述场景图像输入预先训练的目标检测模型中,得到目标检测结果;根据所述目标检测结果,在所述点云数据中标注目标物体。本发明的技术方案提高了点云数据目标检测结果的准确性。
点云数据提取方法、装置、电子设备及存储介质.pdf
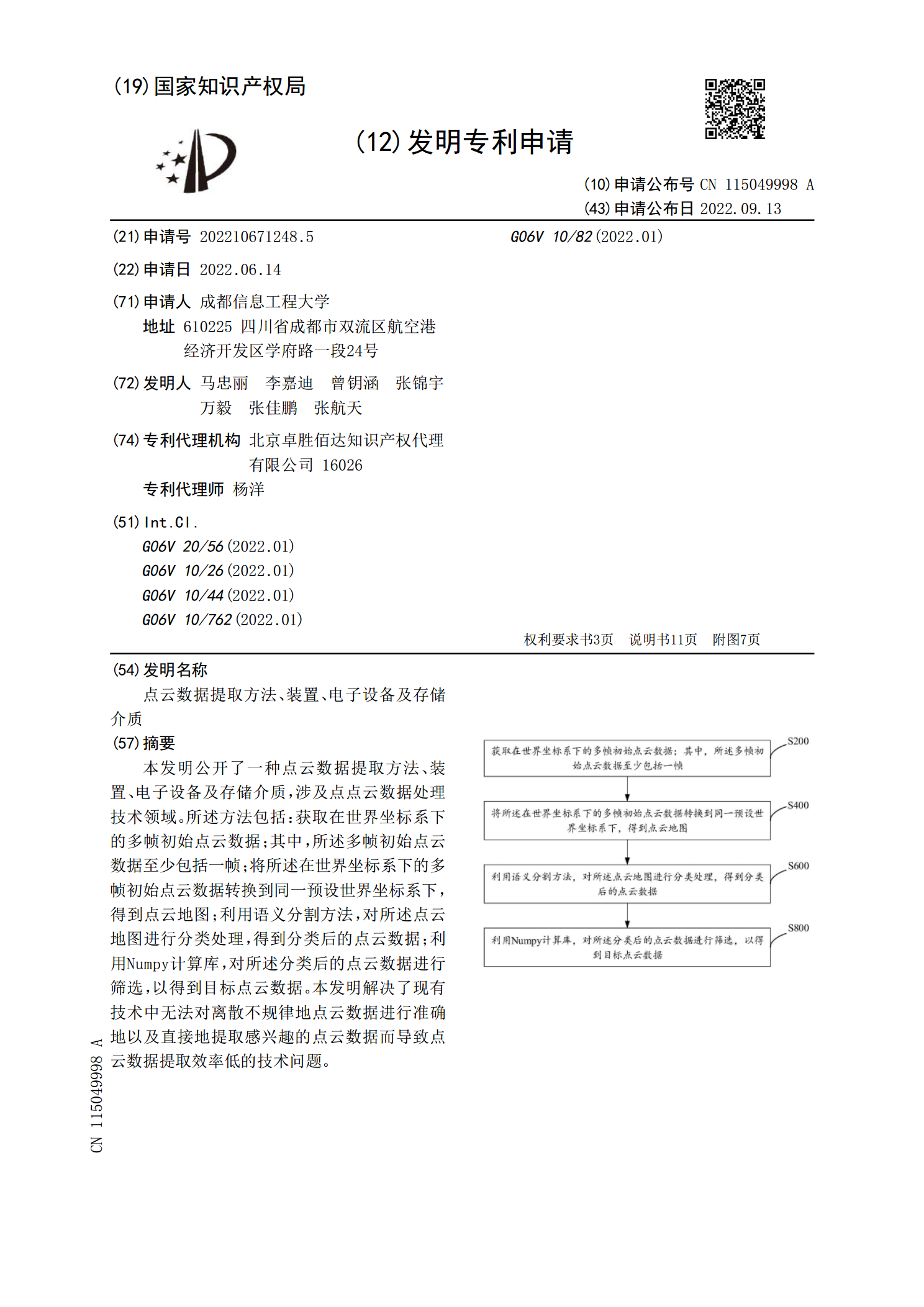
本发明公开了一种点云数据提取方法、装置、电子设备及存储介质,涉及点点云数据处理技术领域。所述方法包括:获取在世界坐标系下的多帧初始点云数据;其中,所述多帧初始点云数据至少包括一帧;将所述在世界坐标系下的多帧初始点云数据转换到同一预设世界坐标系下,得到点云地图;利用语义分割方法,对所述点云地图进行分类处理,得到分类后的点云数据;利用Numpy计算库,对所述分类后的点云数据进行筛选,以得到目标点云数据。本发明解决了现有技术中无法对离散不规律地点云数据进行准确地以及直接地提取感兴趣的点云数据而导致点云数据提取效