
骨科虚拟手术仿真系统研究.pdf

as****16

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

骨科虚拟手术仿真系统研究.pdf
吴冬梅等:骨科虚拟手术仿真系统研究骨科虚拟手术仿真系统研究①吴冬梅②杜志江孙立宁贾志恒(哈尔滨工业大学机器人研究所哈尔滨150001)摘要基于软件平台JAVA3D和VTl(开发出了正骨机器人虚拟手术仿真系统。论述了仿真系统体系结构和主要功能;分析了虚拟手术仿真目标的实现策略;给出了主从操作和并联主手监控实验的仿真结果。结果表明,该仿真系统结构合理可靠,构建的虚拟环境和仿真算法可逼真地演示机器人系统的手术过程。关键词虚拟手术,虚拟环境,碰撞检测,三维重建系统的开发整体上遵循基于面向对象的设计思0引言想,采用
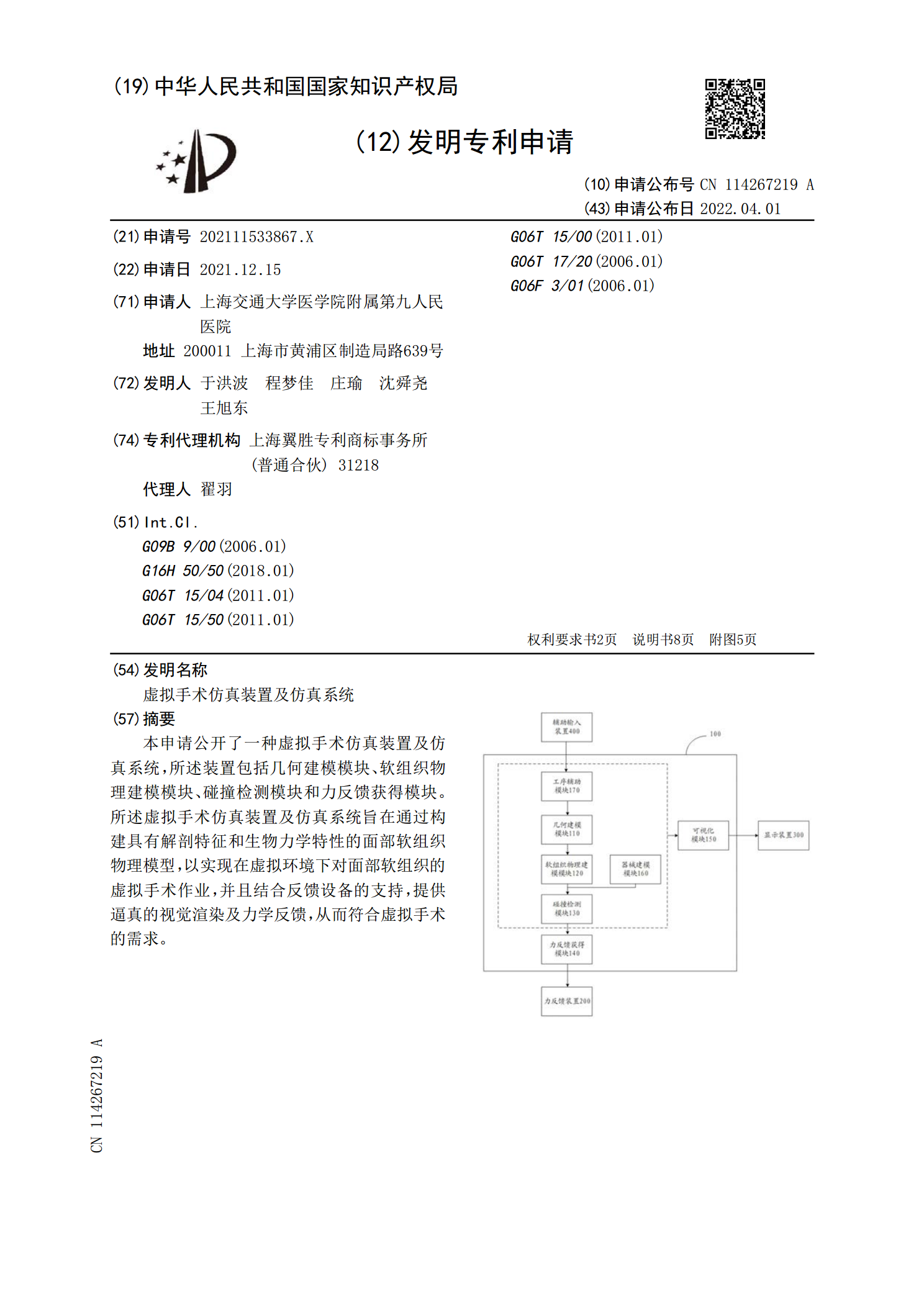
虚拟手术仿真装置及仿真系统.pdf
本申请公开了一种虚拟手术仿真装置及仿真系统,所述装置包括几何建模模块、软组织物理建模模块、碰撞检测模块和力反馈获得模块。所述虚拟手术仿真装置及仿真系统旨在通过构建具有解剖特征和生物力学特性的面部软组织物理模型,以实现在虚拟环境下对面部软组织的虚拟手术作业,并且结合反馈设备的支持,提供逼真的视觉渲染及力学反馈,从而符合虚拟手术的需求。
基于vr的虚拟手术仿真.pdf
基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--

基于vr的虚拟手术仿真.pptx
基于vr的虚拟手术仿真手术仿真系统Satava三代医学仿真系统框架系统功效模块图几何模型重建层次四面体模型生成体模型简化算法简化算法思想简化算法优点体模型简化结果虚拟手术中碰撞检测碰撞检测算法碰撞检测算法比较手术仿真中软组织切割切割判据四面体切割四面体分割粘弹性模型粘弹性模型系统方程:有限元计算模型立体纹理映射试验结果(一)试验结果(二)试验结果(三)今后研究重点:谢谢!
基于vr的虚拟手术仿真.pdf
基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--基于vr的虚拟手术仿真--