
大行程柔性铰链参数优化设计.doc

kp****93


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

大行程柔性铰链参数优化设计.doc
光学系统在光学显微镜、半导体生产和空间探测等超精密工程领域中得到了广泛的应用[1]。为了保证光路的准确性,光学元器件不但需要有很高的面形精度,而且需要精密的定位系统。以大口径空间望远镜的子镜拼接为例,在戈达德太空飞行中心研制的太空球面光学望远镜主镜[2](SPOT)直径3.5m,由6个对角线长0.86m的六角形子镜环状排列组成,中心无镜面。每个子镜都有倾斜、翻转和移动的自由度,SPOT对每个子镜的定位精度提出了很高的要求:镜面法向移动范围目标值±5mm、最小值±1mm,镜面法向移动分辨率目标值<10nm、

大行程柔性铰链Hexapod机构参数优化设计.docx
大行程柔性铰链Hexapod机构参数优化设计摘要:大行程柔性铰链Hexapod机构是一种应用广泛的机构。本文主要介绍了大行程柔性铰链Hexapod机构的结构特点和工作原理。在此基础上,本文进一步进行了参数优化设计,包括对柔性铰链长度、倾角、连接点位置和杆件截面积等参数进行优化。最后,通过实验验证了本文参数优化设计的正确性和可行性。关键词:大行程柔性铰链Hexapod机构;参数优化设计;柔性铰链长度;倾角;连接点位置;杆件截面积。引言:大行程柔性铰链Hexapod机构是一种应用广泛的机构,其具有平稳运动、精

LET柔性铰链的等效刚度分析及其参数优化.docx
LET柔性铰链的等效刚度分析及其参数优化标题:LET柔性铰链的等效刚度分析及其参数优化摘要:柔性铰链在机械设计中起着重要的作用,其设计参数的合理确定对机械模型的运动特性具有决定性影响。本文通过对LET柔性铰链的等效刚度分析及参数优化进行研究,旨在为柔性铰链的设计与应用提供理论指导。关键词:柔性铰链,等效刚度,参数优化引言:柔性铰链是指由柔性材料制成的铰链,在机械系统中具有较大的应用潜力。其特点是具有较高的柔韧性和变形能力,可以适应不同工作条件下的外部载荷。然而,在柔性铰链的应用过程中,其参数的合理选择是实

基于响应面法的柔性铰链优化设计.docx
基于响应面法的柔性铰链优化设计柔性铰链是一种具有一定弯曲和扭转弹性的连接件,它可以在受力时进行一定程度的变形和适应,从而提供一定程度的柔性。柔性铰链广泛应用于机械工程、航空航天、建筑工程等领域,其优化设计对于提高产品的性能和可靠性具有重要意义。本文基于响应面法进行柔性铰链的优化设计研究。首先,介绍柔性铰链的工作原理和应用。柔性铰链由于其特殊的材料和结构设计,具有较好的柔性和可塑性,在复杂环境下能够自适应地进行变形和适应。因此,柔性铰链广泛应用于机械工程领域的连接件、传动件等。然后,分析柔性铰链的设计需求和
一种柔性铰链的拓扑优化设计方法.pdf
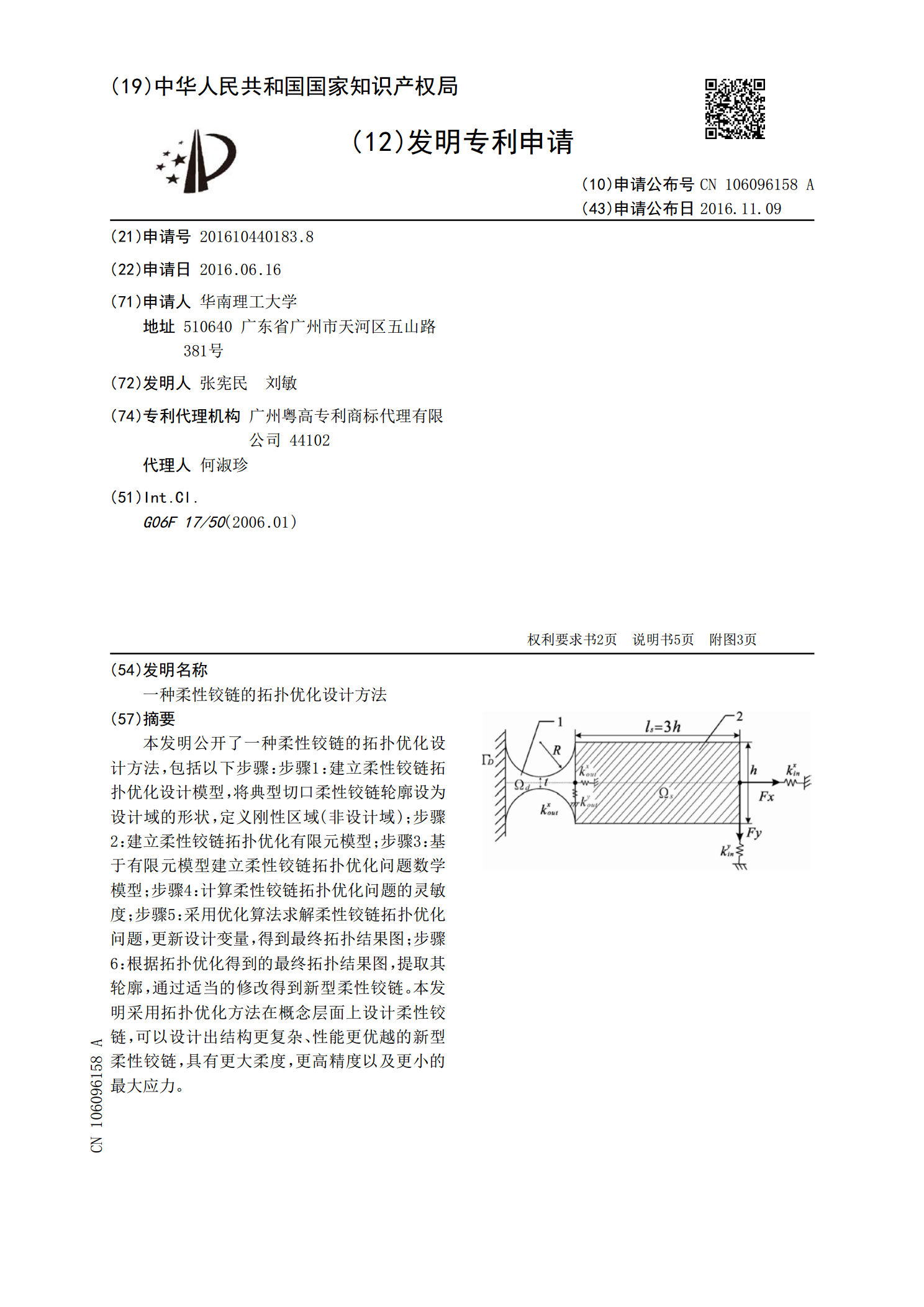
本发明公开了一种柔性铰链的拓扑优化设计方法,包括以下步骤:步骤1:建立柔性铰链拓扑优化设计模型,将典型切口柔性铰链轮廓设为设计域的形状,定义刚性区域(非设计域);步骤2:建立柔性铰链拓扑优化有限元模型;步骤3:基于有限元模型建立柔性铰链拓扑优化问题数学模型;步骤4:计算柔性铰链拓扑优化问题的灵敏度;步骤5:采用优化算法求解柔性铰链拓扑优化问题,更新设计变量,得到最终拓扑结果图;步骤6:根据拓扑优化得到的最终拓扑结果图,提取其轮廓,通过适当的修改得到新型柔性铰链。本发明采用拓扑优化方法在概念层面上设计柔性铰