
第十章 圆柱齿轮公差.ppt

kp****93

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共71页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

公差 第十章 圆柱齿轮公差与检测.ppt
第十章圆柱齿轮公差与检测§1对齿轮传动的使用要求1.传递运动的准确性——即要求齿轮在一转范围内的传动比变化不大,以保证从动件与主动件运动协调。2.传动的平稳性——即要求齿轮在转过一齿范围内的传动比变化甚小,以保证齿轮运转平稳,尽量避免冲击、噪声和振动。传递运动不准确和传动不平稳,都是齿轮传动比变化引起的。3.载荷分布均匀性——即要求齿轮啮合时齿面接触良好,载荷分布均匀,以免引起齿面局部接触应力增大而造成磨损加剧,影响齿轮的工作寿命。4.侧隙——即要求齿轮啮合时,另一侧齿面间应有一定的间隙,以保证储藏润滑油

第十章 圆柱齿轮公差.ppt
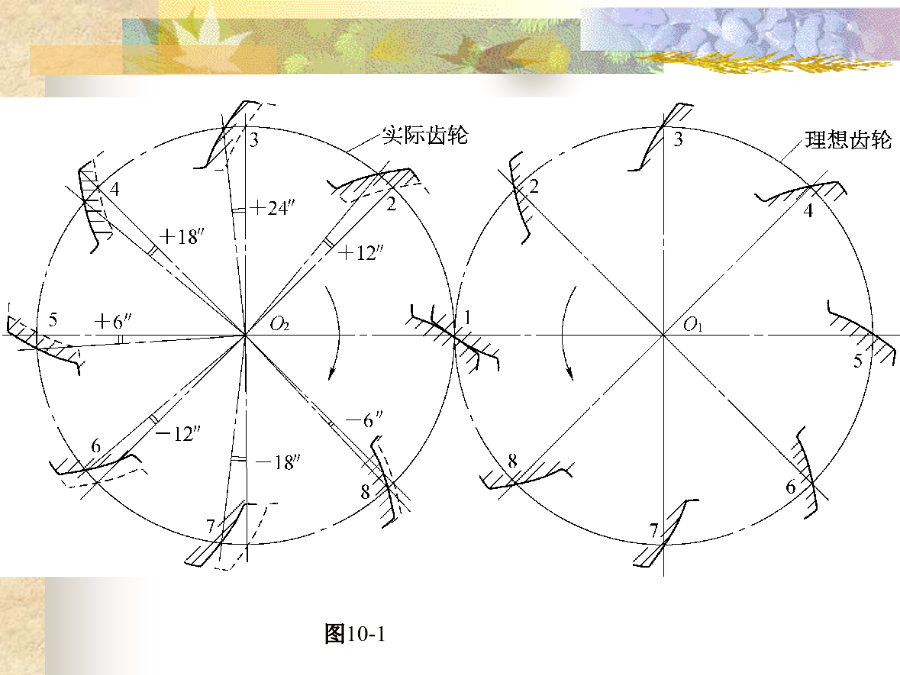
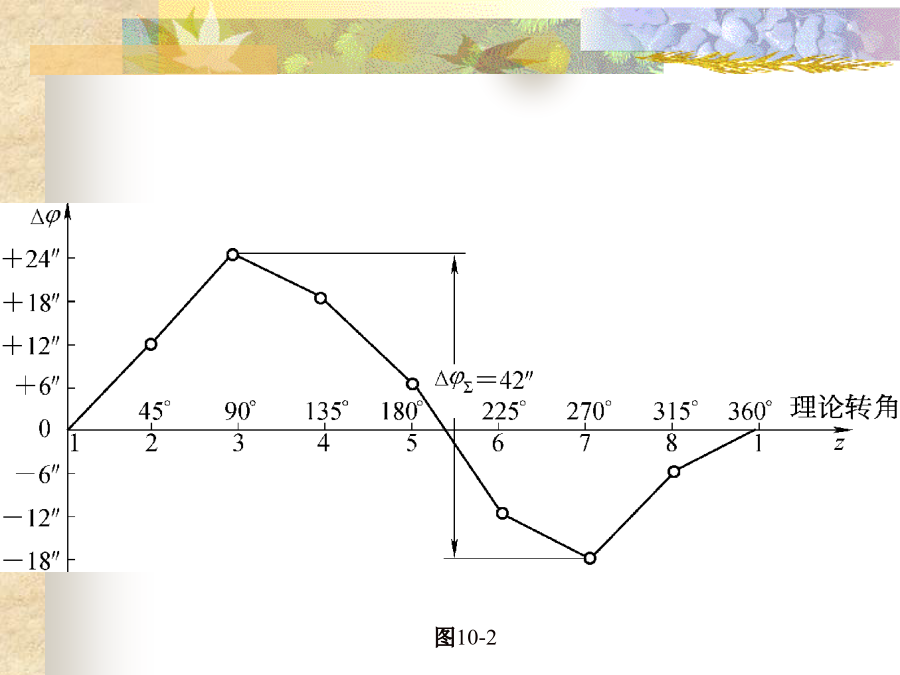
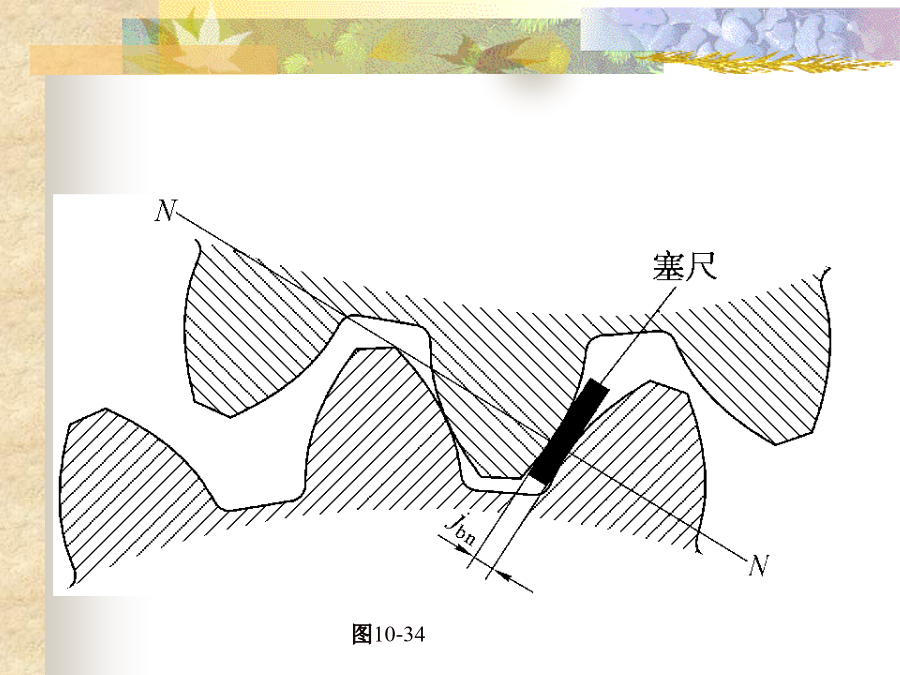
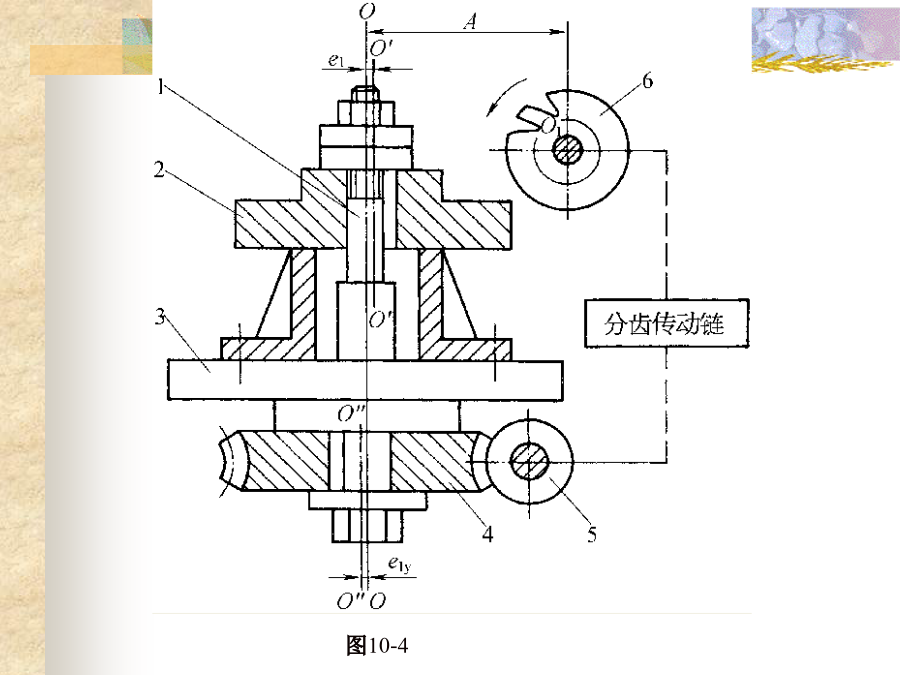
第十章圆柱齿轮公差与检测§1齿轮传动的使用要求图10-1图10-2二、齿轮的传动平稳性图10-34不同用途、不同工作条件的齿轮对精度要求的侧重点不同§2影响齿轮使用要求的主要误差图10-52.齿轮运动偏心运动偏心e2是指机床分度蜗轮几何偏心e1y复映到被切齿轮上的误差(图10-6)。尽管蜗杆匀速旋转,蜗杆与蜗轮啮合节点的线速度相同,蜗轮上的半径不断改变,从而使蜗轮和齿坯产生不均匀回转,角速度在(ω+Δω)和(ω-Δω)之间,以一转为周期变化图10-62.齿轮运动偏心使以齿轮基准轴线为圆心的圆上齿距分布不均

第十章 圆柱齿轮公差.ppt
第十章圆柱齿轮公差与检测§1齿轮传动的使用要求图10-1图10-2二、齿轮的传动平稳性图10-34§2影响齿轮使用要求的主要误差图10-52.齿轮运动偏心运动偏心e2是指机床分度蜗轮几何偏心e1y复映到被切齿轮上的误差(图10-6),因而使以齿轮基准轴线为圆心的圆上齿距分布不均匀(图10-7)。图10-62.齿轮运动偏心运动偏心e2是指机床分度蜗轮几何偏心e1y复映到被切齿轮上的误差(图10-6),因而使以齿轮基准轴线为圆心的圆上齿距分布不均匀(图10-7)。图10-7二、影响齿轮传动平稳性的主要误差图1

第十章 圆柱齿轮公差与测量.ppt
第十章圆柱齿轮公差与检测齿轮公差标注的符号约定符号标注示例:第一节对齿轮传动的使用要求第二节齿轮上影响四项使用要求的主要误差第二节齿轮上影响四项使用要求的主要误差二、齿轮加工误差的特性1、齿轮加工误差的周期性①、长周期误差:以齿轮一转为周期的低频误差。长周期误差主要由齿坯安装偏心和分度蜗轮安装偏心引起。有安装偏心e时,该齿轮以内孔中心0旋转时,将产生转角误差,这种转角误差以齿轮旋转一周为周期,称长周期误差,有安装偏心ek时,蜗杆线速度不变化,蜗轮转角发生变化,引起齿坯转速不均匀,该齿轮以内孔中心0旋转时,

第十章圆柱齿轮传动公差及检测.ppt
第十章圆柱齿轮传动公差及检测本章简介10.1.1对齿轮传动的使用要求影响上述4项要求的误差因素,主要包括齿轮的加工误差和齿轮副的安装误差。齿轮为圆周分度零件,其误差具有周期性,按误差在齿轮一转中是否多次出现,即在齿轮一转中出现的周期或频率,可分为:以齿轮一转为周期的长周期误差,或低频误差,它主要影响传递运动的准确性;以齿轮一齿为周期短周期误差,或高频误差,它主要影响工作平稳性。Ⅰ以滚齿机上滚切齿轮为例,产生加工误差的主要原因为:齿距累积总偏差径向跳动切向综合总偏差径向综合总偏差公法线长度变动1.齿距累积总