
海上自升式钻井平台升降控制系统设计与研究.pdf

as****16


1/10

2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共57页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
海上自升式钻井平台升降控制系统设计与研究.pdf
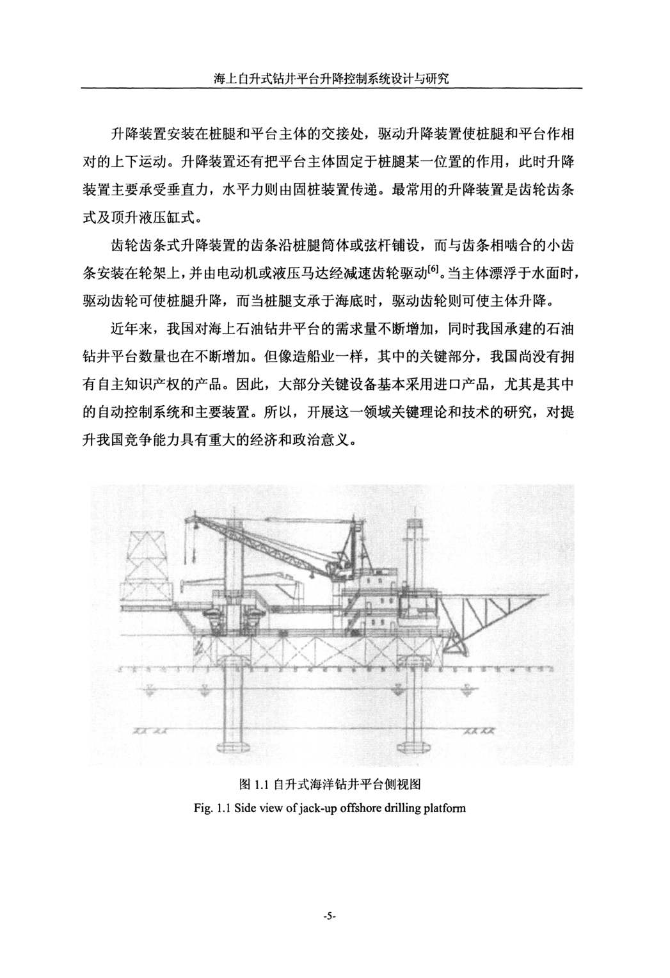
大连海事大学硕士学位论文海上自升式钻井平台升降控制系统设计与研究姓名:梁晓玲申请学位级别:硕士专业:检测技术与自动化装置指导教师:孟宪尧20100601摘要通过采用自适应智能模糊一Smith控制算法对模型进行了仿真研究。随着世界经济和技术的发展,海洋开发已成为全球新技术革命的重要组成部分,而海洋油气开发又是当今海洋资源开发工程的主要内容之一。海洋移动式平台是海洋油气勘探、开发的主要设备。目前,我国使用和制造的海上石油钻井平台中的控制系统基本都是采用国外产品,国内对海上自升式钻井平台升降系统的相关分析相对较
自升式钻井平台及其升降装置.pdf
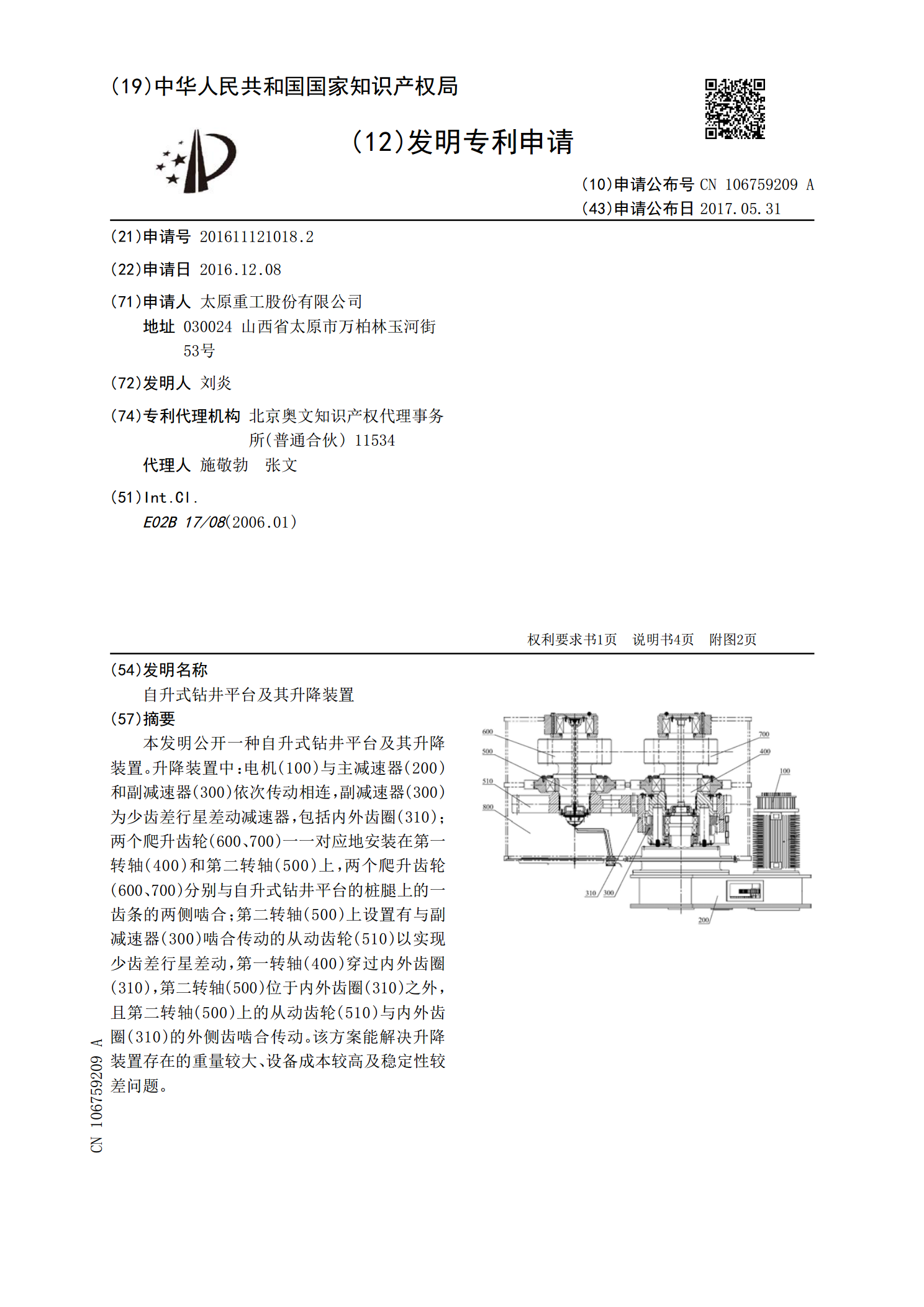
本发明公开一种自升式钻井平台及其升降装置。升降装置中:电机(100)与主减速器(200)和副减速器(300)依次传动相连,副减速器(300)为少齿差行星差动减速器,包括内外齿圈(310);两个爬升齿轮(600、700)一一对应地安装在第一转轴(400)和第二转轴(500)上,两个爬升齿轮(600、700)分别与自升式钻井平台的桩腿上的一齿条的两侧啮合;第二转轴(500)上设置有与副减速器(300)啮合传动的从动齿轮(510)以实现少齿差行星差动,第一转轴(400)穿过内外齿圈(310),第二转轴(500)

自升式海洋钻井平台升降装置.pdf
本发明涉及一种自升式海洋钻井平台升降装置,包括平行轴减速器机构以及行星齿轮减速组件;所述平行轴减速机构包括箱体总成、输入齿轮轴系和平行齿轮轴系,其中输入齿轮轴系联接电机,平行齿轮轴系联接行星齿轮减速组件;所述行星齿轮减速组件包括三组行星齿轮减速机构,其中一级行星齿轮减速机构的一级太阳轮联接所述平行齿轮轴系,所述一级行星齿轮减速机构的一级行星架与二级行星齿轮减速机构的二级太阳轮联接,所述二级行星齿轮减速机构的二级行星架与三级行星齿轮减速机构的三级太阳轮联接,所述三级行星齿轮减速机构的三级行星架与所述主输出轴

海上自升式钻井平台雷电防控技术研究与应用.docx
海上自升式钻井平台雷电防控技术研究与应用摘要:本文针对现有防雷技术,从直击雷和感应雷两个方面分析了适用于海上自升式钻井平台雷电防控技术措施,并通过对某平台进行了适应性改造,经过两个雷雨季节的验证,该钻井平台没有出现过雷电造成的设备损坏,减少了故障时间,为安全生产提供了保障。关键词:防雷;海上自升式钻井平台;等电位;屏蔽浪涌保护器1引言海上钻井平台空间有限,大量的设备布置在工作甲板之上。近年来,在海上作业的一些钻井平台均遭受了不同程度的雷击,不但增加了故障停机时间,而且更带来了一定的安全隐患。依据建(构)筑

新型自升式海洋钻井平台升降装置.pdf
本发明公开了一种新型自升式海洋钻井平台升降装置,其交错轴及平行轴齿轮减速机构的箱体内安装有输入轴系、减速轴系和输出轴系,所述输出轴系为少齿差行星齿轮减速机构的曲轴,所述少齿差行星齿轮减速机构和NGW行星齿轮减速机构的内齿圈分别设置在同一壳体的内圆表面上,该壳体的一端与所述箱体联接,其另一端与大法兰联接,所述大法兰安装在平台主结构架上,所述少齿差行星齿轮减速机构的行星架与所述NGW行星齿轮减速机构的太阳轮轮轴联接;所述NGW行星齿轮减速机构的行星架与七齿输出轴联接,所述七齿输出轴上安装有七齿齿轮。本发明采用