
变频器的PID控制运行操作.doc

kp****93


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

变频器的PID控制运行操作.doc
无锡市技工院校教案首页授课日期12.1712.18班组自动化71001自动化51001课题:变频器的PID控制运行操作教学目的要求:1.理解PID控制的原理2.掌握变频器PID操作的参数设定方法3.了解变频器PID控制的接线方法教学重点、难点:重点:1.PID控制的原理2.变频器PID操作的参数设定方法难点:参数Pr.128的功能授课方法:讲授、分析、图示教学参考及教具(含多媒体教学设备):《变频器原理及应用》机械工业出版社王延才主编授课执行情况及分析:在授课中以恒压供水系统为例介绍了PID控制的原理,这
变频器的PID控制(变频控制经典).pdf
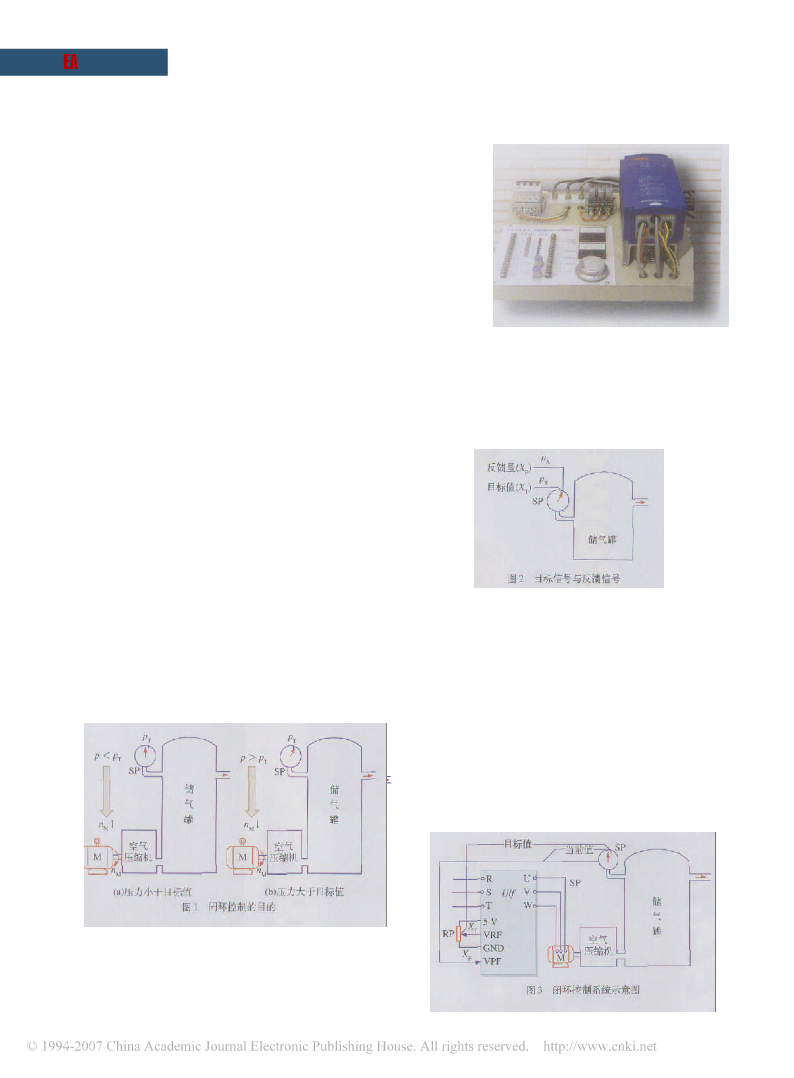
EA产品与技术理论&知识变频调速问答(十二)文/宜昌市自动化研究所张燕宾变频器的PID控制(上)问题1闭环控制要达到什么目的?与储气罐内的实际压力对应的电信号,称为反馈信号,以空气压缩机的恒压控制系统为例,如图1所示。其基用XF表示。在变频器中,XF也称反馈量或当前值。本工作过程是:电动机带动空气压缩机旋转,使之产生压缩在恒压控制系统中,要求XF永远无限接近于XT。空气,并储存于储气罐中。储气罐中空气压力的大小取决于XF≈XT空气压缩机产生压缩空气的能力(在本系统中,就是取决于电pXX反馈量(F)动机的转
变频器课件PID控制功能.ppt
3.3变频器的PID控制功能1.PID控制原理(1)PID的分类。①PI控制。PI控制是由比例控制(P)和积分控制(I)组合成的,根据偏差及时间变化,产生一个执行量。PI运算是P和I运算之和。②PD控制。PD控制是由比例控制(P)和微分控制(D)组合成的,根据改变动态特性的偏差速率,产生一个执行量。PD运算是P和D运算之和。③PID控制。利用PI控制和PD控制的优点组合成的控制。PID运算是P、I和D三个运算的总和。(2)PID的控制逻辑。①负作用。2.P、I、D的控制作用大家有疑问的,可以询问和交流3.
变频器的PID控制(下)(变频控制经典).pdf
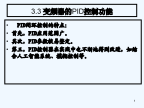
EA产品与技术理论&知识变频调速问答(十二)文/宜昌市自动化研究所张燕宾变频器的PID控制(下)问题9变频器的PID功能有效时,有哪些功能将发生变化?图11a所示是用户用气量Q的变化情形。图11b所示是pX当PID功能有效时,变频器的主要变化如下:储气罐的压力(与之对应的反馈量是F)的变化情形,由于(1)给定信号PID调节的结果,它的变化是很小的。图11c所示是用气量QΔ不论是键盘给定或是外接给定,所给定的信号不再是频发生变化(从而储气罐的压力也变化)时,PID的调节量PID,XΔXX率给定信号,而是目标
变频器课件PID控制功能-PPT.ppt
3.3变频器的PID控制功能1.PID控制原理(1)PID的分类。①PI控制。PI控制是由比例控制(P)和积分控制(I)组合成的,根据偏差及时间变化,产生一个执行量。PI运算是P和I运算之和。②PD控制。PD控制是由比例控制(P)和微分控制(D)组合成的,根据改变动态特性的偏差速率,产生一个执行量。PD运算是P和D运算之和。③PID控制。利用PI控制和PD控制的优点组合成的控制。PID运算是P、I和D三个运算的总和。(2)PID的控制逻辑。①负作用。2.P、I、D的控制作用大家有疑问的,可以询问和交流3.