
复杂环境下罗兰C∕北斗组合导航方法及仿真分析.pdf

13****80


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

复杂环境下罗兰C∕北斗组合导航方法及仿真分析.pdf
北斗组合导航方法及仿真分析罗兰C∕北斗组合导航方法及仿真分析随着现代化技术的不断发展,导航技术也日益成熟。在复杂环境下进行导航,要求导航系统具有高精度、高鲁棒性以及高度可靠性等特点。而罗兰C∕北斗组合导航方法作为一种新型导航技术,能够满足这些要求。下面将介绍罗兰C∕北斗组合导航方法及其仿真分析。一、罗兰C∕北斗组合导航方法罗兰C∕北斗组合导航方法是将两种不同的导航系统进行融合,达到提高导航精度及鲁棒性的效果。罗兰C是一种基于惯性导航系统的高精度导航技术,基于姿态矩阵的扩展卡尔曼滤波算法是其主要算法;北斗卫

北斗罗兰-C组合定位技术.docx
北斗罗兰-C组合定位技术北斗罗兰-C组合定位技术摘要:北斗导航卫星系统(Beidou,全球导航卫星系统)是中国自主研发的全球卫星导航系统之一。北斗卫星导航系统直接受益的对象越来越广泛,应用深度不断提升,C组合定位技术便是其中之一。在本文中,我们将介绍C组合定位技术在北斗卫星导航系统中的应用,探讨其优势以及未来的发展方向。1.北斗卫星导航系统的简介北斗卫星导航系统是中国自主研发的卫星导航系统,它由北斗导航卫星系统、北斗地面增强系统和用户终端系统3部分组成。它是中国第一个,也是世界上第三个全球卫星导航系统。北
一种复杂环境下的多源组合导航定位方法.pdf
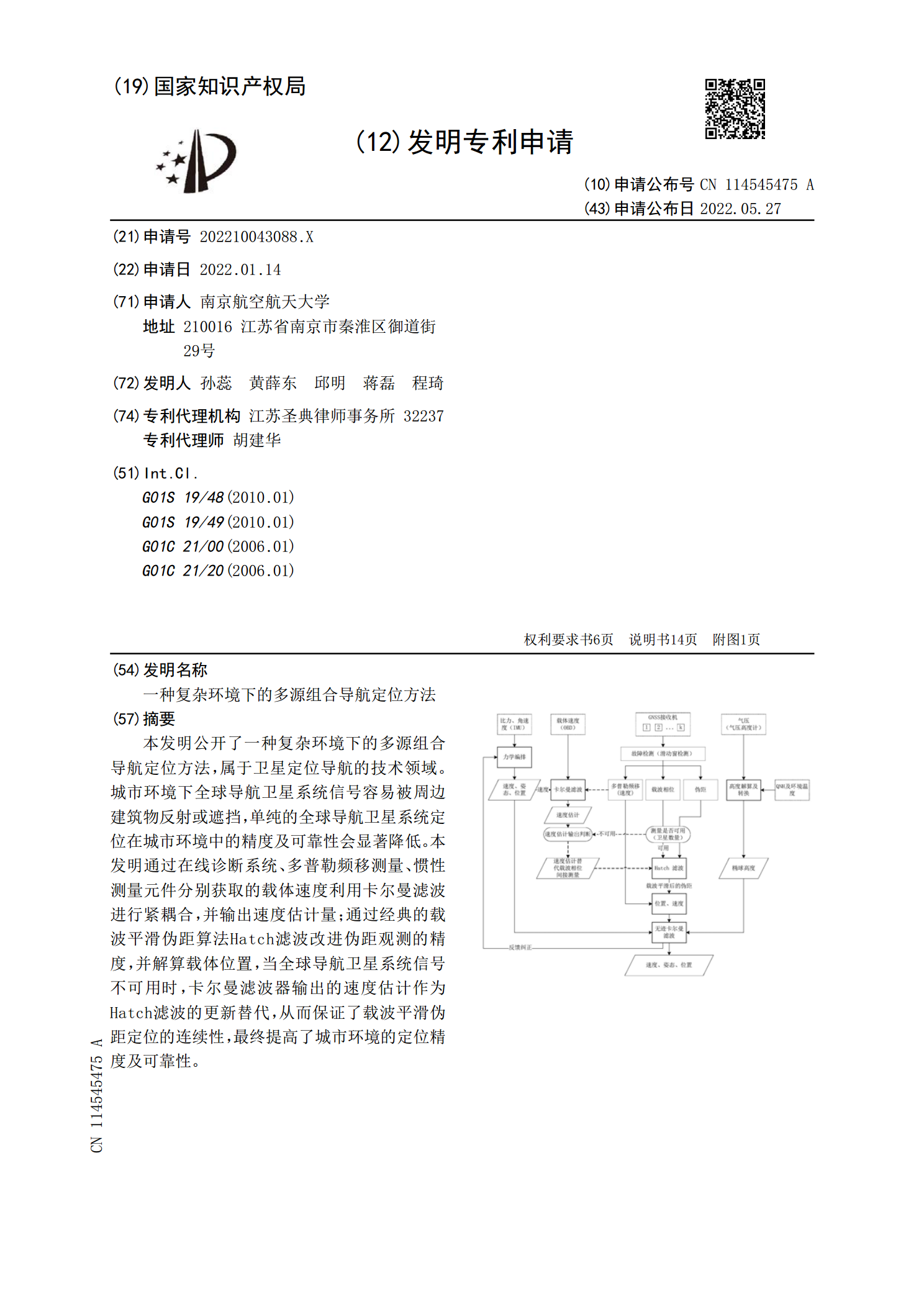
本发明公开了一种复杂环境下的多源组合导航定位方法,属于卫星定位导航的技术领域。城市环境下全球导航卫星系统信号容易被周边建筑物反射或遮挡,单纯的全球导航卫星系统定位在城市环境中的精度及可靠性会显著降低。本发明通过在线诊断系统、多普勒频移测量、惯性测量元件分别获取的载体速度利用卡尔曼滤波进行紧耦合,并输出速度估计量;通过经典的载波平滑伪距算法Hatch滤波改进伪距观测的精度,并解算载体位置,当全球导航卫星系统信号不可用时,卡尔曼滤波器输出的速度估计作为Hatch滤波的更新替代,从而保证了载波平滑伪距定位的连续

复杂城市环境下GNSSINS组合导航可观测度分析及鲁棒滤波方法.docx
复杂城市环境下GNSSINS组合导航可观测度分析及鲁棒滤波方法标题:复杂城市环境下GNSS/INS组合导航可观测度分析及鲁棒滤波方法摘要:随着城市化进程的不断加快,城市环境中导航系统的性能受到了越来越大的限制。GNSS/INS组合导航技术被广泛应用于定位、导航和姿态测量等领域,但在复杂城市环境中的可观测度分析和鲁棒滤波方法研究仍具有一定的挑战性。本论文通过对复杂城市环境下GNSS/INS组合导航系统的可观测度进行分析,提出了一种基于鲁棒滤波的解决方案,通过实验验证了该方法的有效性。1.引言随着城市化进程的

复杂桥梁环境下的北斗数据质量监测与分析.docx
复杂桥梁环境下的北斗数据质量监测与分析复杂桥梁环境下的北斗数据质量监测与分析摘要:随着社会和经济的发展,桥梁成为城市发展的重要标志。在桥梁建设中,监测桥梁的结构健康状况是至关重要的,而北斗系统为桥梁监测提供了更加精确和实时的数据。然而,复杂的桥梁环境会对北斗数据的质量产生影响,因此需要进行监测与分析,以确保数据的准确性和可靠性。本论文将重点讨论复杂桥梁环境下的北斗数据质量监测与分析的方法和技术,对北斗系统在桥梁监测中的应用进行探讨。关键词:复杂桥梁环境,北斗数据,质量监测,分析1.引言桥梁作为重要的交通和