
一种车辆轮廓检测方法、装置、电子设备和可读存储介质.pdf

春波****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆轮廓检测方法、装置、电子设备和可读存储介质.pdf
本发明提供了一种车辆轮廓检测方法、装置、电子设备和可读存储介质,所述方法包括:确定所述目标车辆停放的目标检测位置;通过多个预设的激光雷达采集所述目标车辆的多个点云数据;旋转平移所述多个点云数据,拼接成为全局点云数据;从所述全局点云数据中分割出所述目标车辆以外的点云数据,得到车辆点云数据;根据所述车辆点云数据,确定所述目标车辆的车辆轮廓数据。本发明实施例提供的车辆轮廓检测方法,通过基于激光雷达的检测,不仅具有分辨率高、抗干扰能力强、不受光线影响等特点,还使得车辆能够在静止状态下进行轮廓检测;此外,车辆还能够
器官轮廓检测方法、装置、电子设备及可读存储介质.pdf
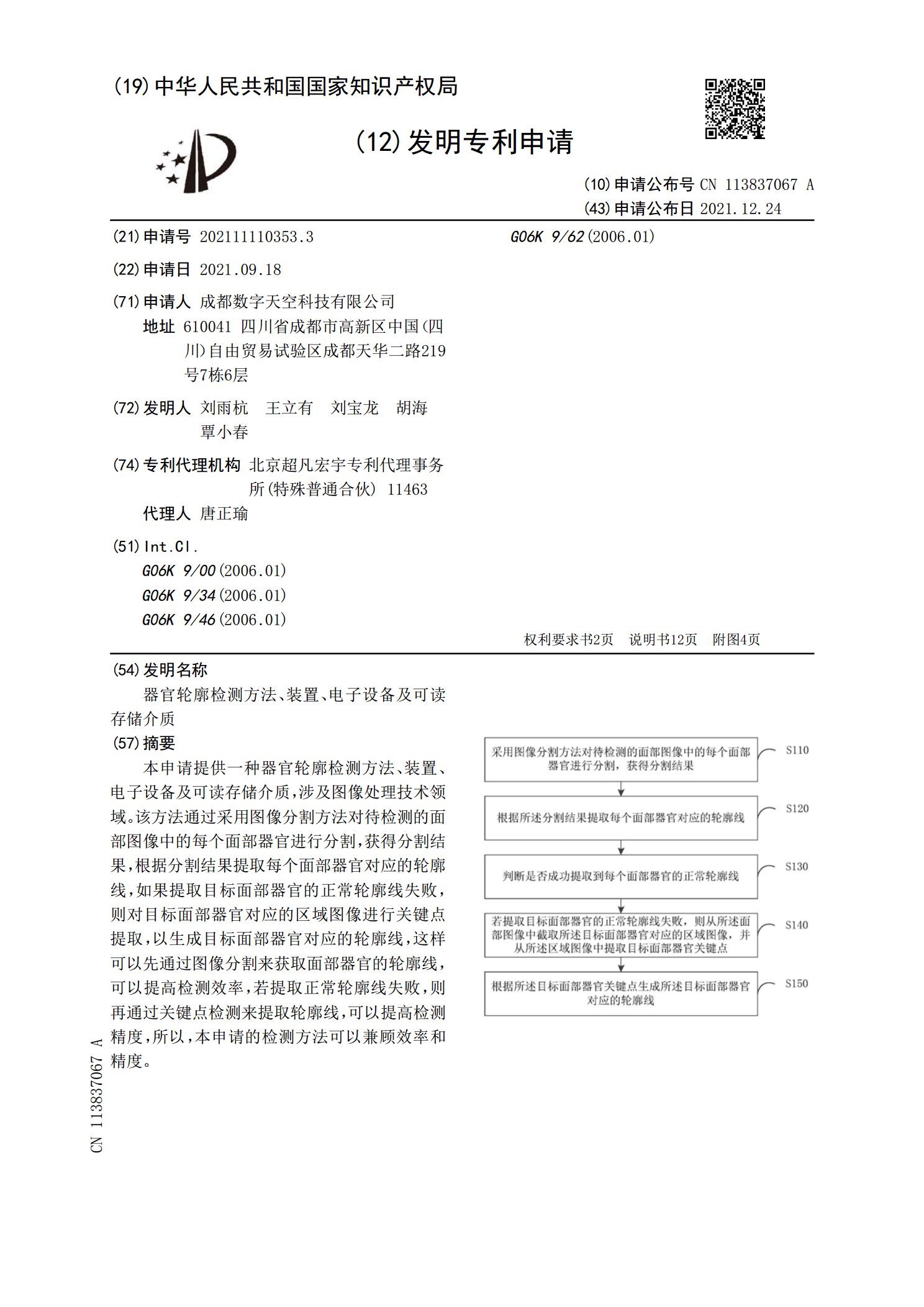
本申请提供一种器官轮廓检测方法、装置、电子设备及可读存储介质,涉及图像处理技术领域。该方法通过采用图像分割方法对待检测的面部图像中的每个面部器官进行分割,获得分割结果,根据分割结果提取每个面部器官对应的轮廓线,如果提取目标面部器官的正常轮廓线失败,则对目标面部器官对应的区域图像进行关键点提取,以生成目标面部器官对应的轮廓线,这样可以先通过图像分割来获取面部器官的轮廓线,可以提高检测效率,若提取正常轮廓线失败,则再通过关键点检测来提取轮廓线,可以提高检测精度,所以,本申请的检测方法可以兼顾效率和精度。

车辆检测方法、装置、电子设备及可读存储介质.pdf
本申请提供一种车辆检测方法、装置、电子设备及可读存储介质,该方法包括:检测加油站的指定区域是否存在车辆进入;当检测到目标车辆进入所述指定区域时,获取所述目标车辆的车辆属性信息;其中,所述车辆属性信息包括车牌信息;定时检测所述目标车辆是否停留在所述指定区域;当确定所述目标车辆离开所述指定区域时,确定所述目标车辆在所述指定区域的停留时间。该方法可以实现对车辆在加油站的指定区域的停留时间的实时检测,提高了加油站车辆停留时间的统计效率。
人体外轮廓点检测方法、装置、电子设备和可读存储介质.pdf
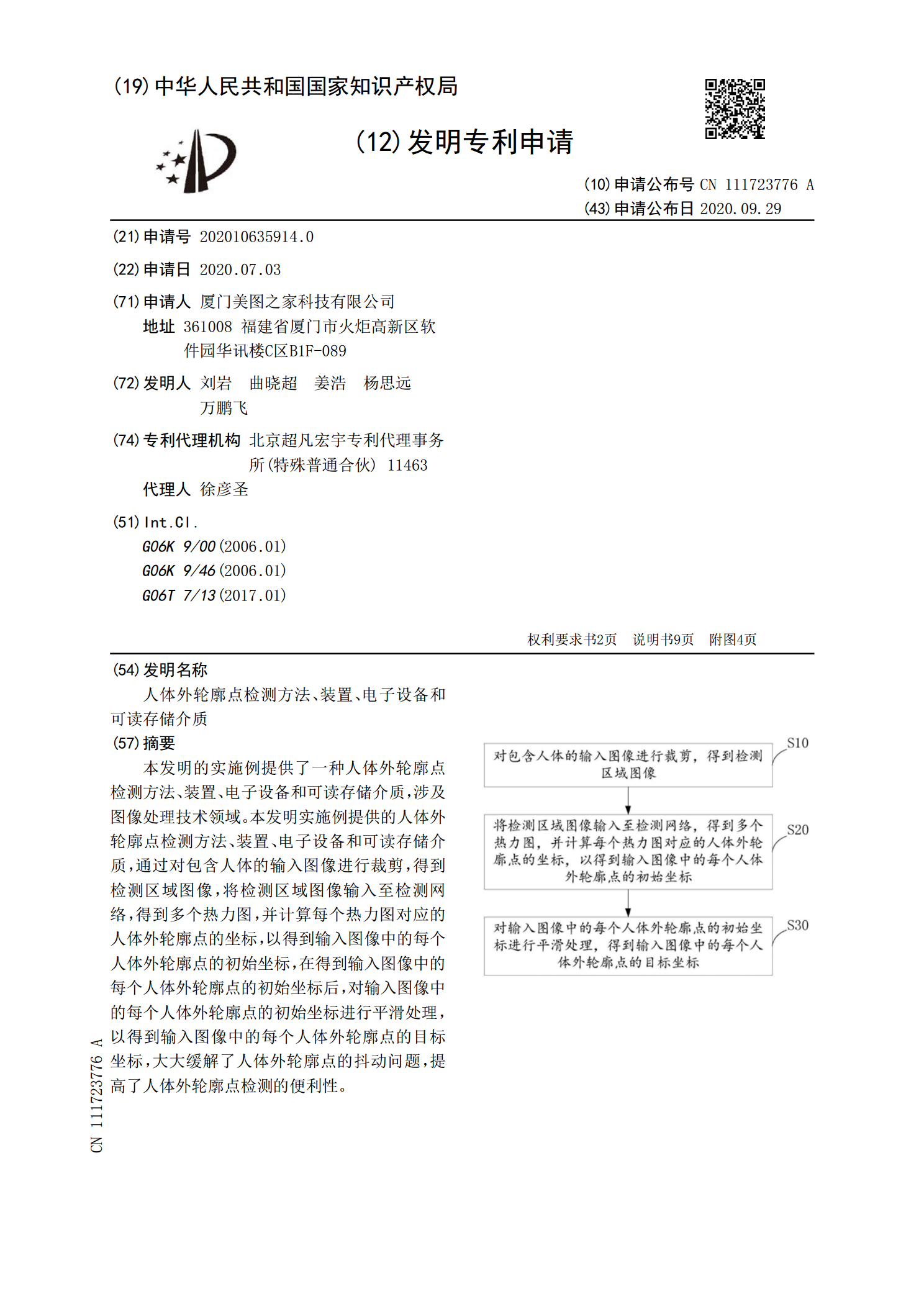
本发明的实施例提供了一种人体外轮廓点检测方法、装置、电子设备和可读存储介质,涉及图像处理技术领域。本发明实施例提供的人体外轮廓点检测方法、装置、电子设备和可读存储介质,通过对包含人体的输入图像进行裁剪,得到检测区域图像,将检测区域图像输入至检测网络,得到多个热力图,并计算每个热力图对应的人体外轮廓点的坐标,以得到输入图像中的每个人体外轮廓点的初始坐标,在得到输入图像中的每个人体外轮廓点的初始坐标后,对输入图像中的每个人体外轮廓点的初始坐标进行平滑处理,以得到输入图像中的每个人体外轮廓点的目标坐标,大大缓解

车辆部件检测方法、装置、电子设备及可读存储介质.pdf
本公开提供一种车辆部件检测方法、装置、电子设备及计算机可读存储介质,涉及车辆部件检测技术领域,该方法包括:获取车辆部件中待检测零件的目标图像,获取所述目标图像对应的预设零件模板,确定所述目标图像与所述预设零件模板之间的相似度,比对所述相似度与预设相似度阈值,得到对比结果,并根据所述对比结果确定所述待检测零件是否安装正确。本公开实现了车辆部件的误欠品检测,提升了车辆部件的误欠品检测方法的适用范围。