
一种激光动态扫描测距方法及系统.pdf

努力****冰心


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种激光动态扫描测距方法及系统.pdf
本发明公开了一种激光动态扫描测距方法及系统,激光动态扫描装置包括红外搜索平台、激光跟踪平台和指挥控制计算机,红外搜索平台包括热像仪、图像处理器和信息处理器,热像仪用于输出周视图像;图像处理器用于对热像仪输出的周视图像实施目标捕获和建航;信息处理器用于将图像处理器捕获的目标信息上传至指挥控制计算机;激光跟踪平台包括伺服控制器、万向架、以及安装于万向架上的激光测距机,伺服控制器用于控制该激光跟踪平台启停、调转和按规划路径运动,并控制激光测距机的启停,将获取的目标距离发送至指挥控制计算机。本发明采用动态扫描测距

一种基于激光扫描测距仪的铁路隧道限界动态检测系统及方法.pdf
本发明提供一种基于激光扫描测距仪的铁路隧道限界动态检测系统及方法。系统包括多台激光扫描测距仪和上位机;多台激光扫描测距仪分别安装在铁路隧道限界检测车车体内部同一铁路隧道断面的不同位置;各激光扫描测距仪通过以太网与上位机连接。方法包括:实时获取同一铁路隧道断面的不同位置信号;根据激光扫描测距仪中心到铁路隧道断面某测量点的距离,换算出钢轨平面中心点到该测量点的距离;存储钢轨平面中心点到同一铁路隧道断面不同测量点的距离和角度;生成每一个铁路隧道断面的成像。激光扫描测距仪同时检测隧道洞壁同一断面不同位置,保证覆盖

一种激光测距方法、对焦方法、激光测距系统及对焦系统.pdf
本发明涉及测距领域,公开了一种激光测距方法、对焦方法、激光测距系统及对焦系统,包括:向反射镜发射入射角为δ的入射光线α,入射光线α经反射镜反射产生第一反射光线β,第一反射光线β照射待测物体;摄取第二反射光线θ并在激光成像面生成激光图像,第二反射光线θ为第一反射光线β照射于待测物体表面后产生的返回光线γ,再通过反射镜反射产生;基于激光图像根据几何三角定理计算测量距离A。以入射光线α的发射点和第二反射光线θ的接收点的连线L为底边,以入射光线α与第二反射光线θ延长线的相交角为顶角构成的三角形的底边的高与测量距离

一种动态扫描状态下的激光测距光学系统.pdf
本发明公开了一种动态扫描状态下的激光测距光学系统,包括脉冲激光器和激光探测器;包括沿光轴方向依次布设的激光发射系统、二维扫描镜、折转反射镜和激光接收系统;二维扫描镜和折转反射镜的法线方向与光轴方向成45°布设;激光接收系统包括俯仰扫描反射镜和方位扫描反射镜,俯仰扫描反射镜和方位扫描反射镜的法线方向与光轴方向成45°布设;二维扫描镜、俯仰扫描反射镜和方位扫描反射镜角度能够调整。通过对二维扫描镜、俯仰扫描反射镜和方位扫描反射镜角度的调整,实现接收系统探测角度的变化。处于平行光中的俯仰和方位扫描反射镜能够减小自
基于MOEMS扫描镜的激光测距方法及激光雷达系统.pdf
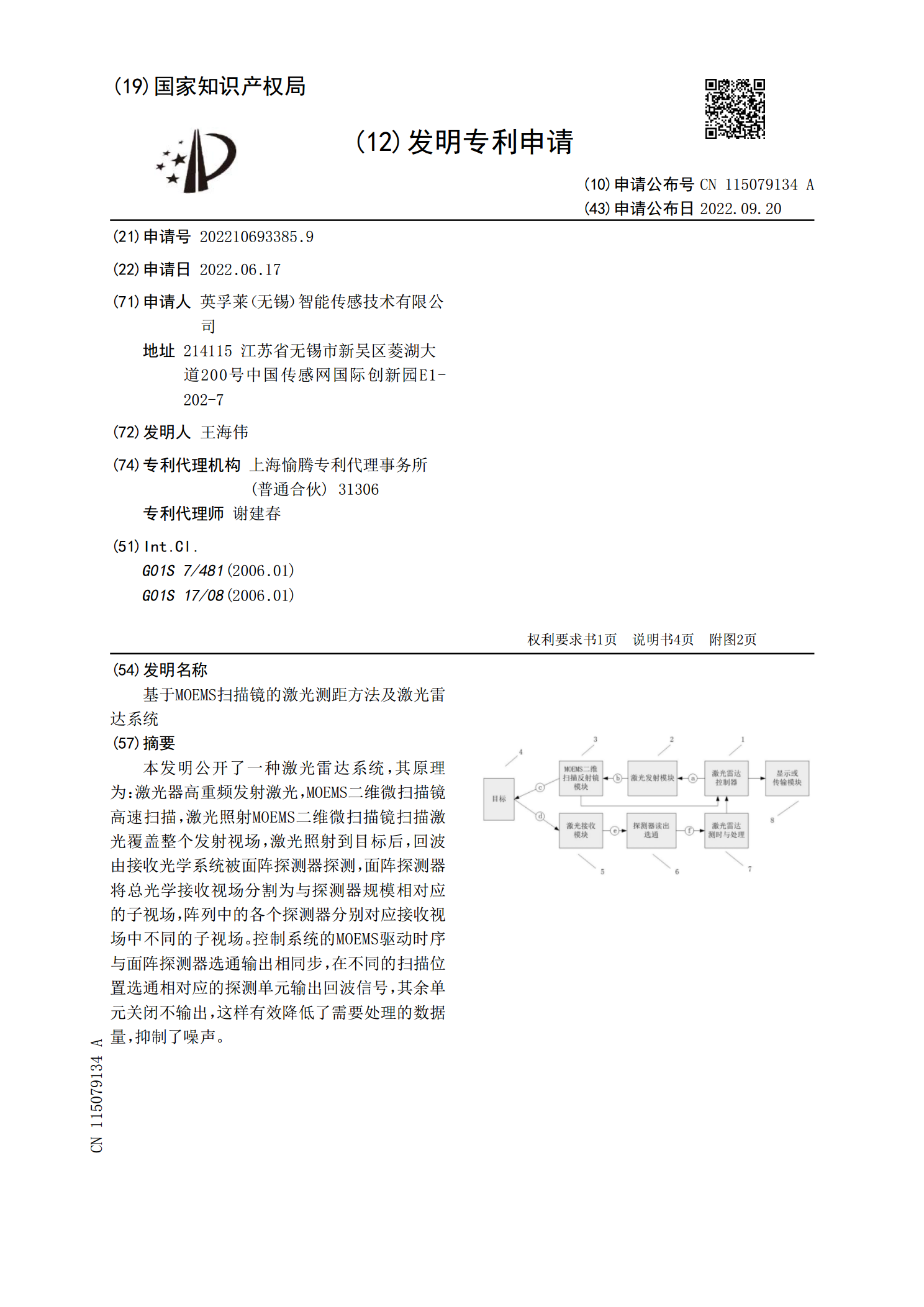
本发明公开了一种激光雷达系统,其原理为:激光器高重频发射激光,MOEMS二维微扫描镜高速扫描,激光照射MOEMS二维微扫描镜扫描激光覆盖整个发射视场,激光照射到目标后,回波由接收光学系统被面阵探测器探测,面阵探测器将总光学接收视场分割为与探测器规模相对应的子视场,阵列中的各个探测器分别对应接收视场中不同的子视场。控制系统的MOEMS驱动时序与面阵探测器选通输出相同步,在不同的扫描位置选通相对应的探测单元输出回波信号,其余单元关闭不输出,这样有效降低了需要处理的数据量,抑制了噪声。