
平衡缸系统及重载机器人.pdf

雨巷****莺莺

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

平衡缸系统及重载机器人.pdf
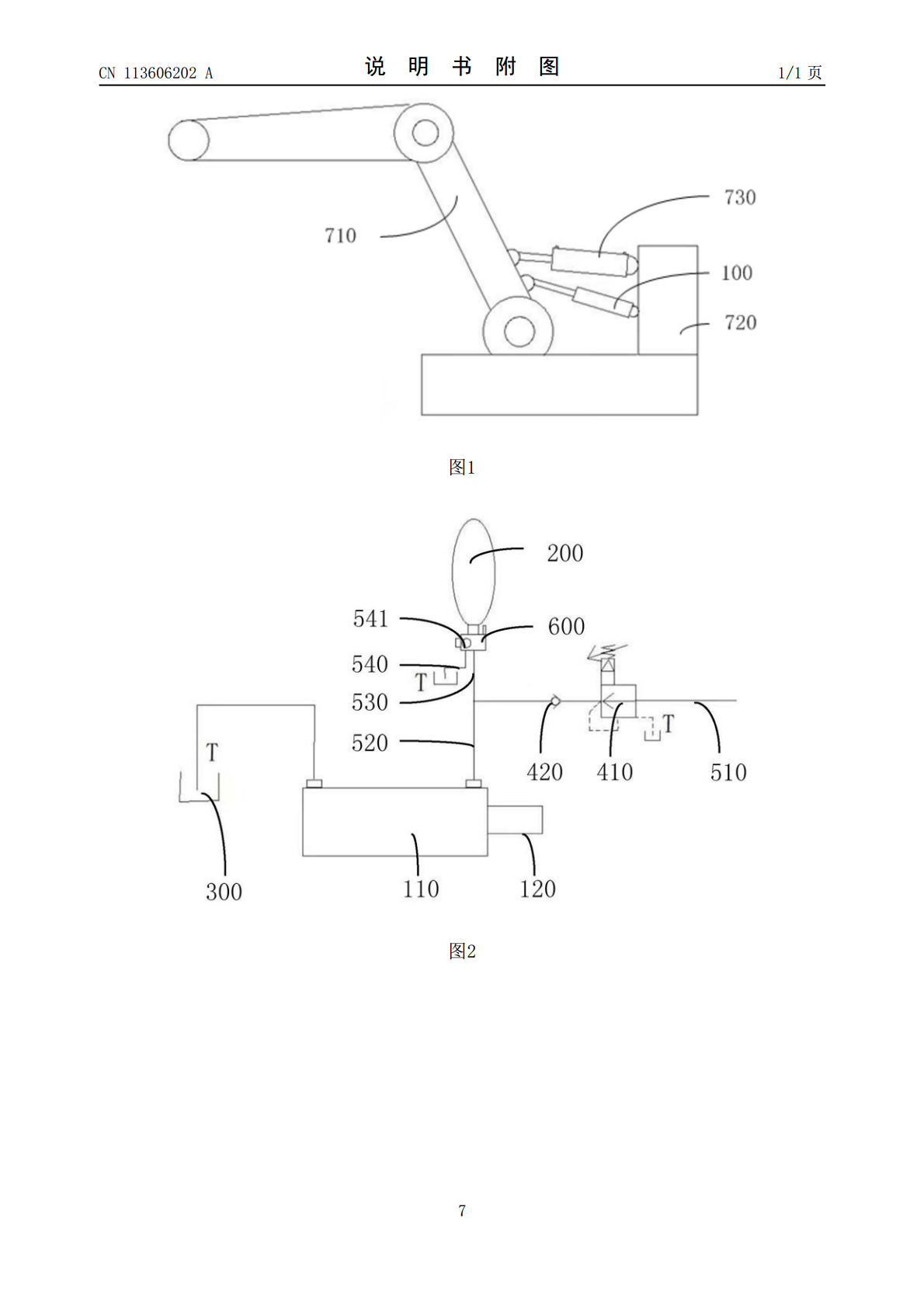
本申请涉及一种平衡缸系统,包括平衡缸、蓄能器和供油装置,所述平衡缸包括缸体和活动杆,所述活动杆的活塞端可活动地设置于缸体内,且将所述缸体分为第一腔体和第二腔体,所述蓄能器和所述供油装置均与所述第一腔体连通,所述供油装置与所述第一腔体之间依次设置有压力调节机构和单向阀,在所述活塞端朝向所述第二腔体移动时,所述供油装置向所述第一腔体和所述蓄能器供油;在所述活塞端朝向所述第一腔体移动时,所述第一腔体向所述蓄能器供油以产生油压。本方案能够解决目前重载机器人所使用的平衡缸存在体积较大、且较难满足较大型负载的问题。

KR机器人平衡缸拆装.docx
OPL(OnePointLesson)表格分类基础管理改善事例故障处理管理号主题KR150机器人平衡缸拆装制定人制定日小组名小组1.吊装的位置2.拆除①8个-M6×12,取下端盖②再取下卡簧③3.拆除内六方螺钉四个M10×16并取下端盖,拧进四个M10×50内六方螺钉,如上图③。拧到明显费力时,再多拧转45°,直到活塞杆解除负载,阶梯形销②才能够拔出。4.装上M12吊环5.拆除M12×140螺钉①,拔出阶梯形销②。6.松开两个M16x80内六方螺钉,调整吊绳的位置,平衡缸是被拉紧。7.拆除两个M16x80

重载机器人平衡系统参数优化与运动规划方法研究与实现的任务书.docx
重载机器人平衡系统参数优化与运动规划方法研究与实现的任务书一、任务背景随着机器人技术的不断发展,重载机器人在工业、军事、医疗等领域中得到广泛应用。然而,由于其体积大、重量重、惯性大等特点,重载机器人的平衡系统设计和运动规划存在诸多挑战。为了提高重载机器人的运动稳定性和精度,需要对平衡系统参数进行优化,同时对运动规划方法进行研究和实现,以提高其控制精度和运动灵活性。因此,本文旨在对重载机器人平衡系统参数优化和运动规划方法进行研究与实现。二、研究内容1.重载机器人平衡系统参数优化(1)收集重载机器人平衡系统参
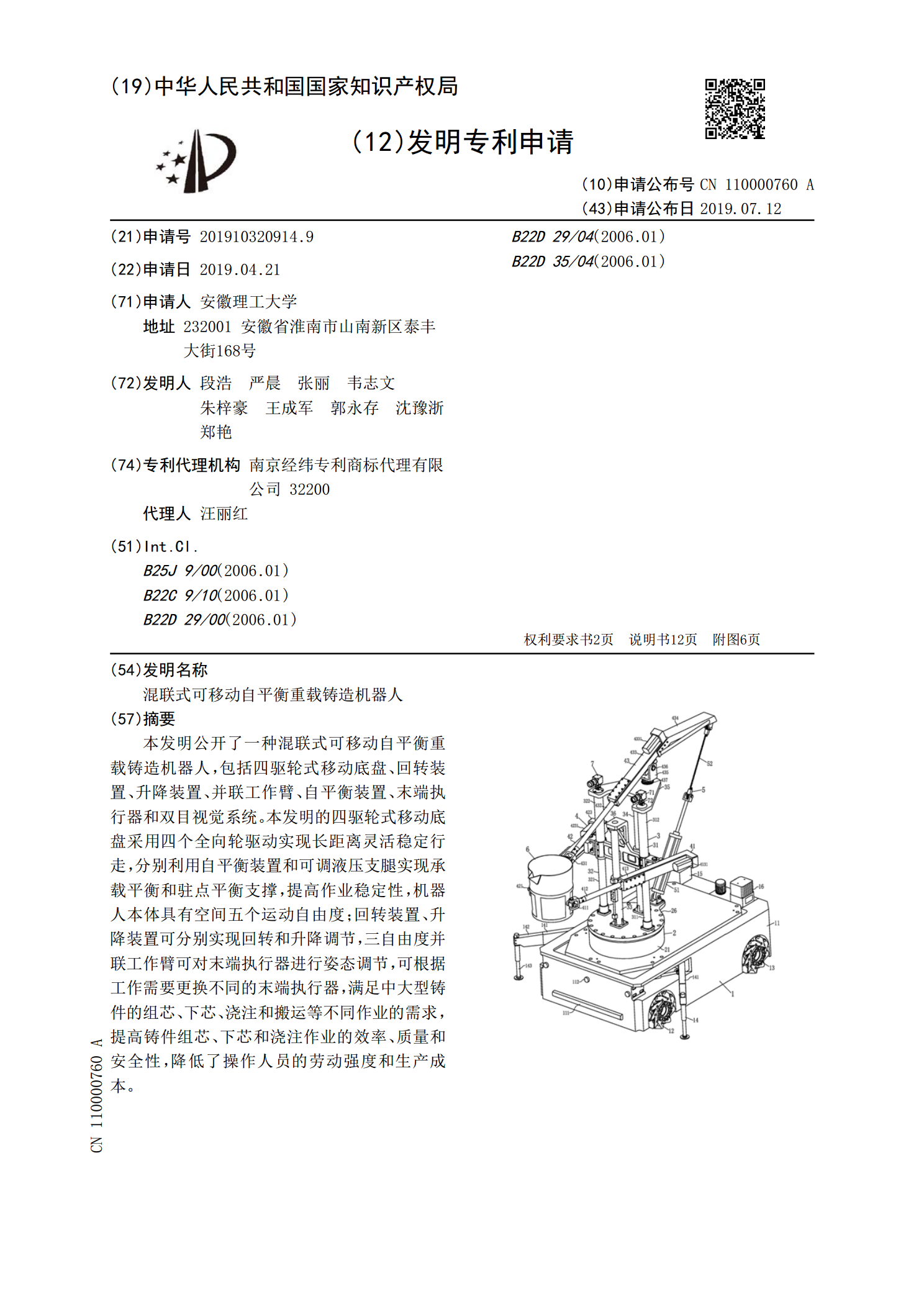
混联式可移动自平衡重载铸造机器人.pdf
本发明公开了一种混联式可移动自平衡重载铸造机器人,包括四驱轮式移动底盘、回转装置、升降装置、并联工作臂、自平衡装置、末端执行器和双目视觉系统。本发明的四驱轮式移动底盘采用四个全向轮驱动实现长距离灵活稳定行走,分别利用自平衡装置和可调液压支腿实现承载平衡和驻点平衡支撑,提高作业稳定性,机器人本体具有空间五个运动自由度;回转装置、升降装置可分别实现回转和升降调节,三自由度并联工作臂可对末端执行器进行姿态调节,可根据工作需要更换不同的末端执行器,满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸件组

重载浇注机器人执行系统设计与研究.docx
重载浇注机器人执行系统设计与研究重载浇注机器人执行系统设计与研究摘要:重载浇注机器人是一种先进的自动化生产工具,被广泛应用于各种工业生产领域。本论文主要研究重载浇注机器人的执行系统设计,包括其工作原理、关键技术和设计方法。通过对重载浇注机器人执行系统的深入研究和分析,提出了一种基于自主学习的执行系统设计方法,该方法能够提高重载浇注机器人的工作效率和稳定性。本论文通过实验数据和实际应用验证了该方法的可行性和有效性。关键词:重载浇注机器人,执行系统,自主学习,工作效率,稳定性。一、引言重载浇注机器人是一种多关