
一种基于双波段信息融合的抗拖曳欺骗干扰方法.pdf

涵蓄****09

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于双波段信息融合的抗拖曳欺骗干扰方法.pdf
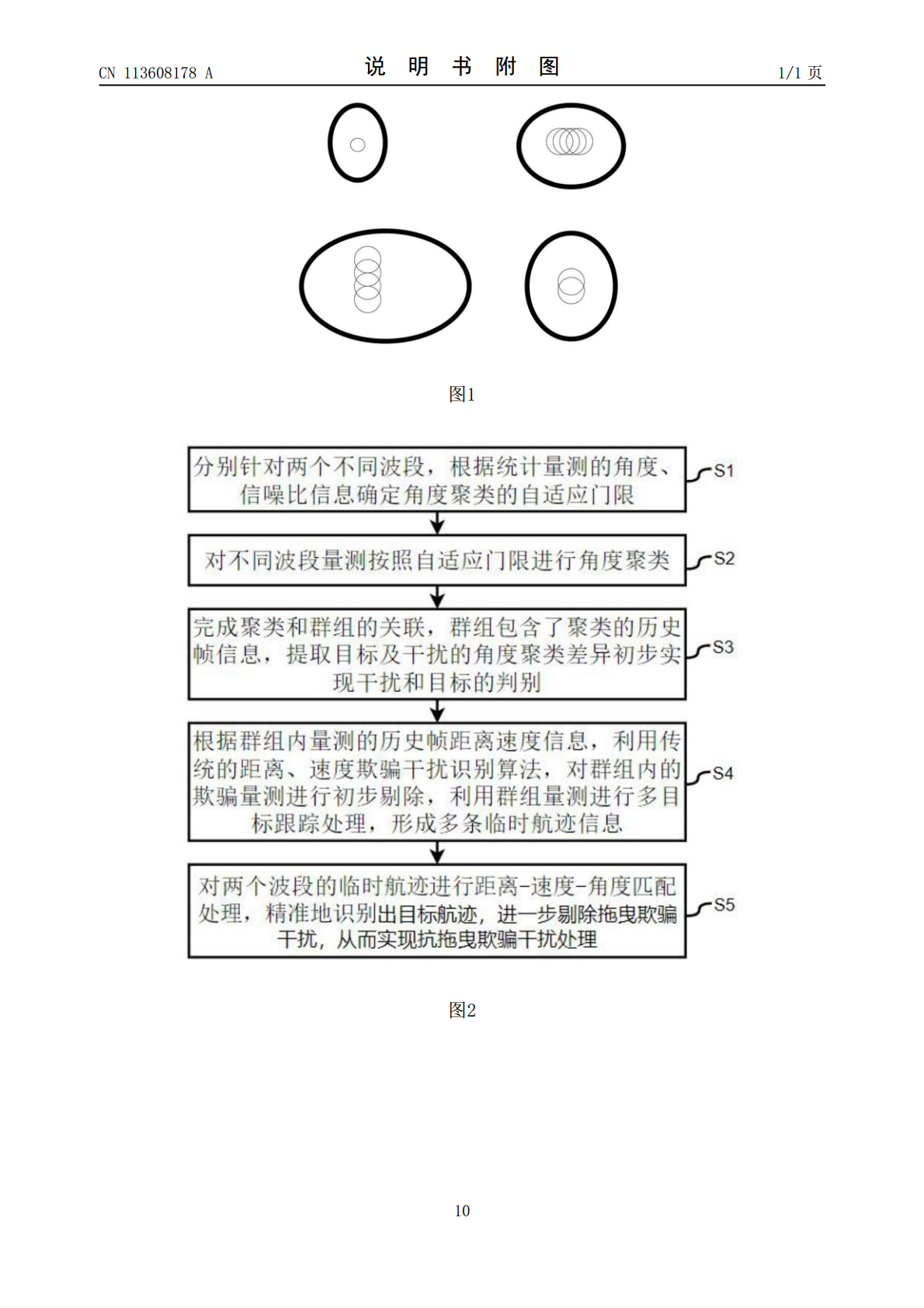
本发明公开了一种基于双波段信息融合的抗拖曳欺骗干扰方法,该方法首先分别利用两个波段的量测信息进行角度聚类处理,能够实现特定方向密集干扰量测的角度聚类,通过对角度聚类内的历史量测进行距离速度关联分析,初步实现干扰和目标的判别,剔除了疑似干扰量测,提升干扰的识别速度;最后,通过对两个波段的临时航迹进行距离‑速度‑角度匹配,实现对真实目标的判别,可以提升对目标的识别概率,增强系统的抗干扰能力。

一种双波段雷达抗拖曳式诱饵干扰方法.pdf
一种双波段雷达抗拖曳式诱饵干扰方法,雷达的C波段和Ku波段分别同时进行多目标跟踪和干扰类型的判定,当C波段和Ku波段都不受干扰时,进行双波段时间对准、航迹关联和航迹融合,当只有一个波段不受干扰时,与系统航迹进行关联,受干扰波段进行被动角跟踪信息融合,当两个波段都受干扰时,进行航迹外推,选择干扰能量大的波段的干扰角度进行被动角跟踪信息融合。本发明应用于弹载导引头中,能有效提高弹载雷达对拖曳式诱饵的抗干扰性能。

基于有源无源融合的雷达抗欺骗干扰方法研究.docx
基于有源无源融合的雷达抗欺骗干扰方法研究基于有源无源融合的雷达抗欺骗干扰方法研究摘要:随着无人机等小型无人目标的快速发展,雷达在目标检测和跟踪方面面临着越来越严峻的挑战。其中,欺骗干扰是最常见的问题之一,严重影响了雷达的性能。针对这一问题,本文研究了基于有源无源融合的雷达抗欺骗干扰方法。通过结合主动干扰和被动检测,实现了对欺骗信号的快速识别和消除。实验结果表明,该方法能够有效降低欺骗干扰对雷达的影响,提高雷达的性能。1.引言随着科技的不断发展,雷达技术在国防、民用等领域扮演着重要角色。然而,在现实应用中,

基于峰值比较的雷达抗欺骗干扰方法.docx
基于峰值比较的雷达抗欺骗干扰方法基于峰值比较的雷达抗欺骗干扰方法摘要:随着雷达技术的不断发展,对抗雷达的欺骗干扰也越发严峻。在雷达系统中,欺骗干扰对于目标检测与跟踪性能产生了极大的影响。本文提出一种基于峰值比较的雷达抗欺骗干扰方法。该方法基于雷达接收到的信号的峰值特性,通过比较不同目标或杂波信号的峰值,可以有效识别和抵御欺骗干扰,提高雷达系统的抗干扰能力。关键词:雷达;欺骗干扰;峰值比较;抗干扰能力一、引言雷达是一种通过发射电磁波并接收其反射信号来探测和跟踪目标的技术。然而,雷达系统在实际应用中常常会受到

一种GNSS抗欺骗干扰方法.pdf
本发明公开了一种GNSS抗欺骗干扰方法,在欺骗检测阶段,选择在真实卫星信号附近设定一个预警范围,当发现“多径信号”逐渐移动进入预警范围时,“多径信号”被视为欺骗信号。由于多径信号与欺骗信号的区分基于欺骗干扰的过程进行,更为可靠和准确,减少欺骗检测的误判。同时,在欺骗消除阶段,采用经验模态分解对混合信号进行分解处理,对各个剩余分量进行相关运算,得到各个分量的多普勒频移和码相位,然后再采用分类器进行分类,将距离基准数据最小的一组分量的码相位和多普勒频移均判定为真实卫星信号的码相位和多普勒频移,最后优化拟合得到