
同步带传动设计参数确定方法、装置、存储介质以及设备.pdf

霞英****娘子


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
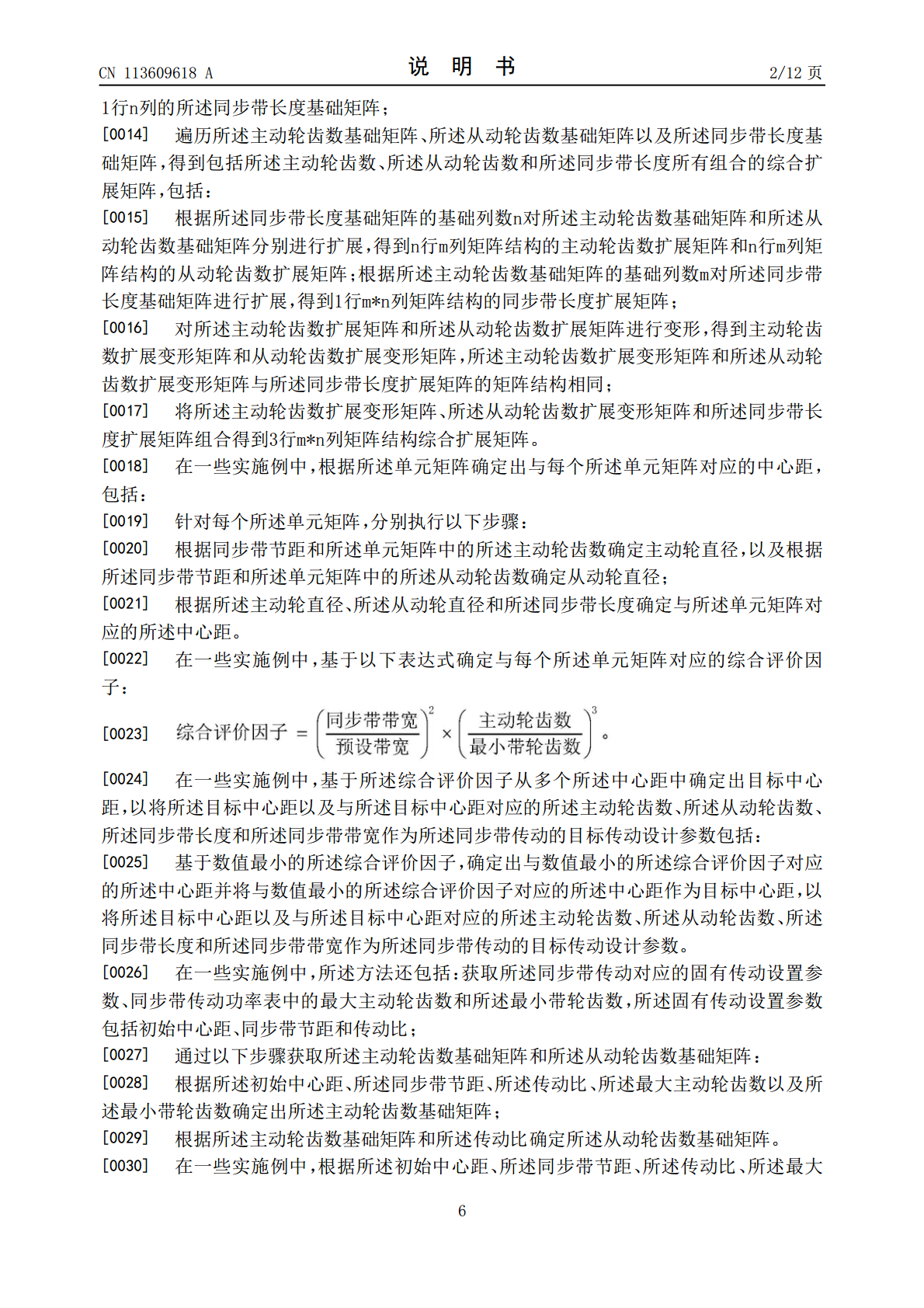
同步带传动设计参数确定方法、装置、存储介质以及设备.pdf
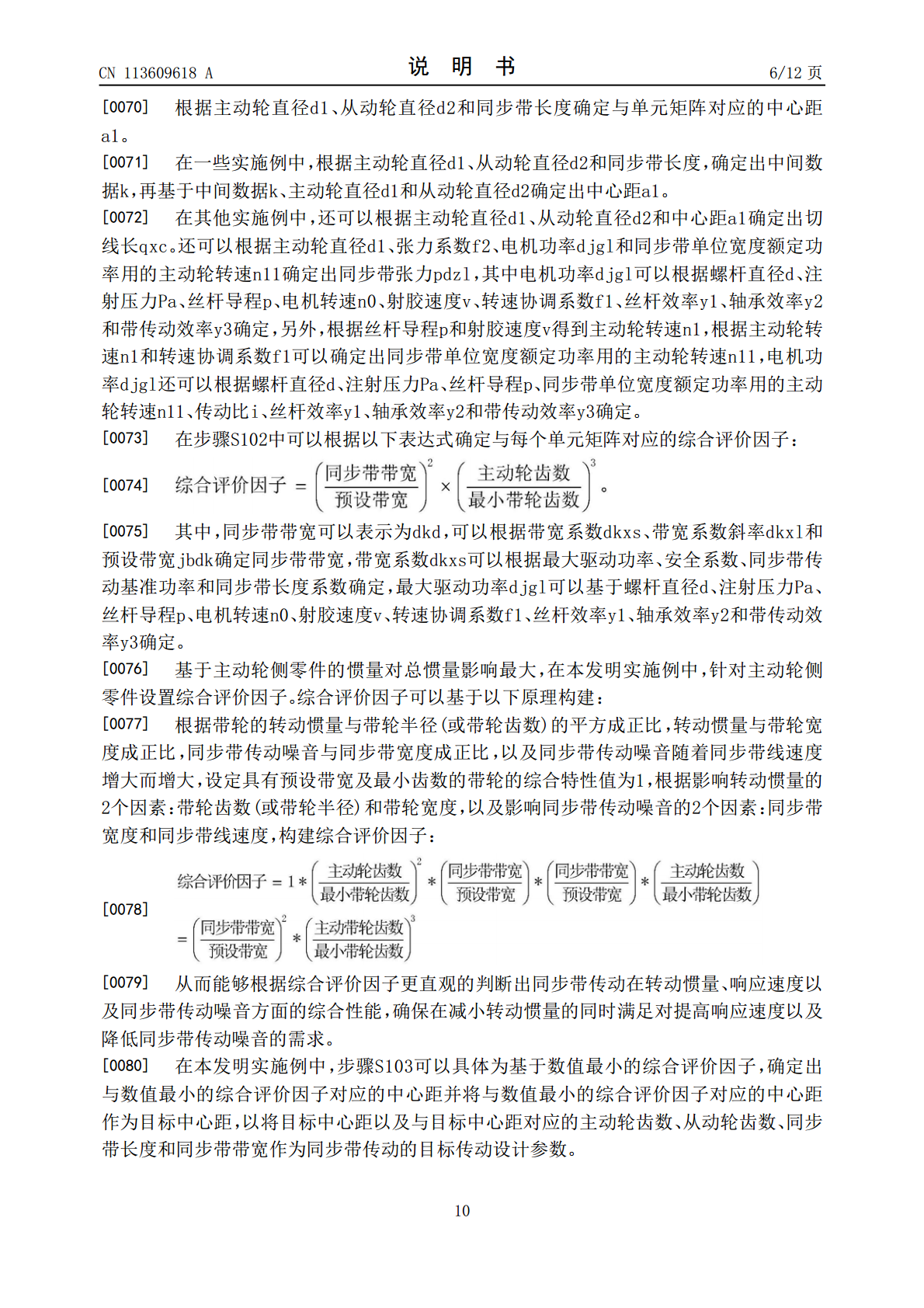
本发明公开了一种同步带传动设计参数确定方法、装置、存储介质以及设备,同步带传动可以包括主动轮、从动轮和同步带,通过获取多个单元矩阵,其中单元矩阵可以包括一个主动轮齿数、一个从动轮齿数和一个同步带长度,根据单元矩阵确定出与每个单元矩阵对应的中心距以及综合评价因子,再基于综合评价因子从多个中心距中确定出目标中心距,以将该目标中心距以及与目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带传动的目标传动设计参数。该方法基于综合评价因子确定目标传动设计参数,可以在减少惯量设计的同时有效保证提高
监控参数确定方法、装置、设备以及存储介质.pdf
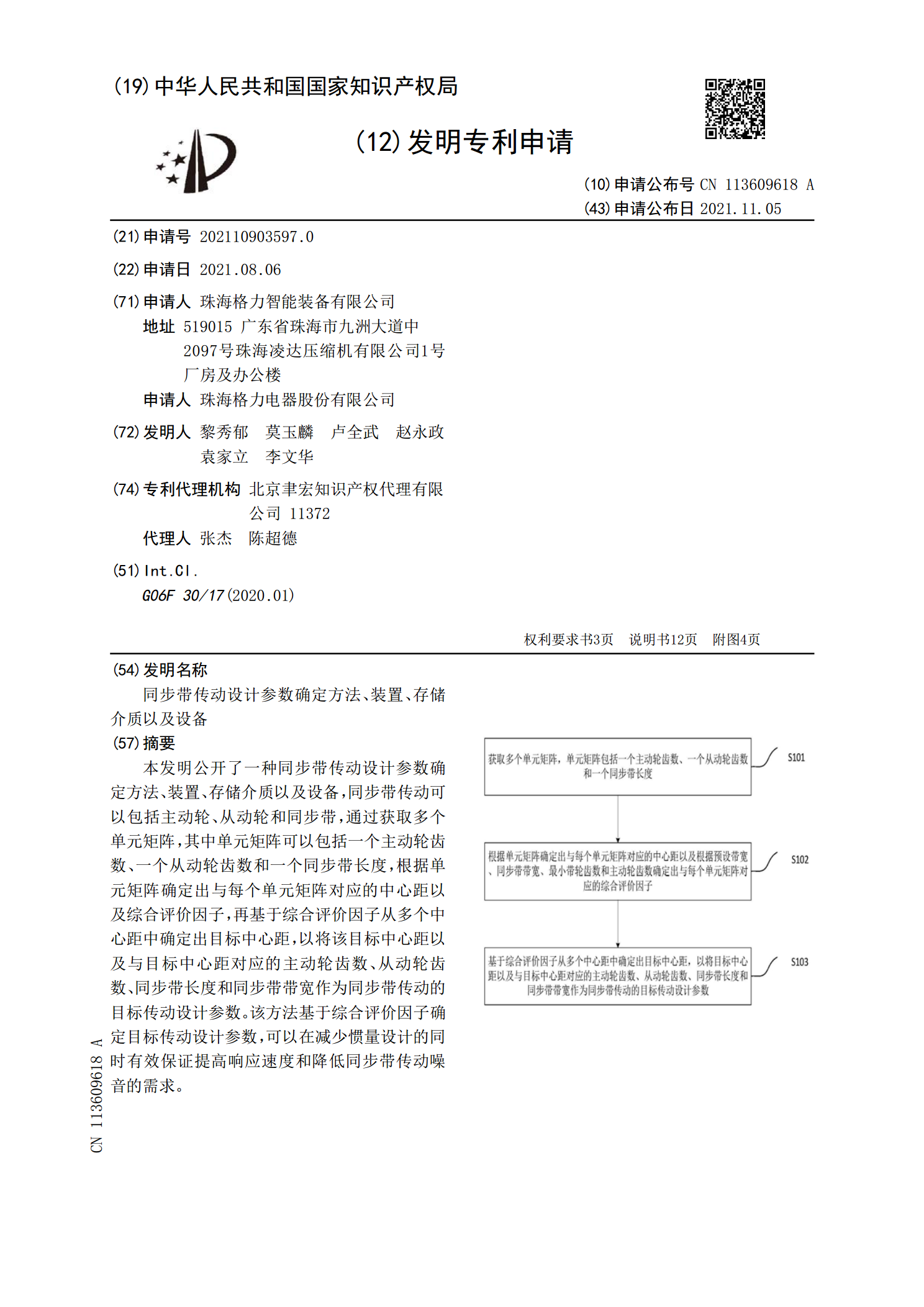
本申请实施例公开了一种监控参数确定方法、装置、设备以及存储介质,涉及数据处理领域,尤其涉及信息流技术。具体实现方案为:获取待监控业务的监测数据序列,以及所述监测数据序列的监测指标数据;对所述监测数据序列进行至少一种时间粒度的划分,得到至少两个数据片段;根据所述数据片段的指标分布特征,从所述至少两个数据片段中确定目标片段;根据所述目标片段确定监控参数,以根据所述监控参数对所述待监控业务进行异常监控。本申请实施例提供了一种监控参数确定方法、装置、设备以及存储介质,实现了对异常监控参数的自动确定,进而减少人工调
超参数确定方法、装置、设备及存储介质.pdf
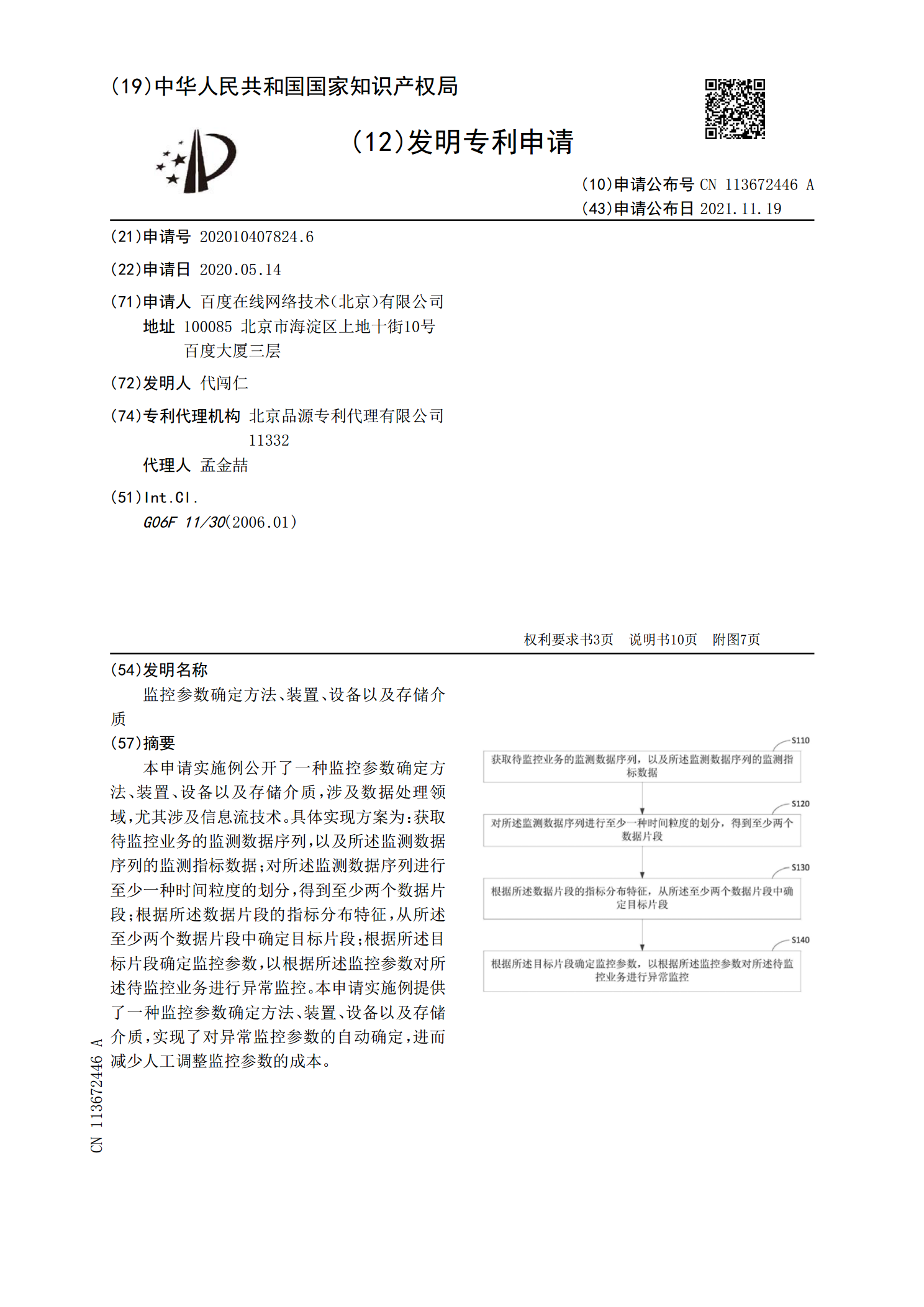
本申请为人工智能技术领域,本申请提供了一种超参数确定方法、装置、设备及存储介质,其中,所述方法包括:将随机生成的第一超参数组配置至机器学习模型中,将训练数据输入该机器学习模型中进行训练,输出第一训练效果,将第一超参数组及第一训练效果输入超参数生成模型中,得到第二超参数组;将第二超参数组配置至机器学习模型中,并将训练数据输入配置了第二超参数组的机器学习模型中进行训练,输出第二训练效果;将第二超参数组及第二训练效果输入超参数生成模型中,得到第三超参数组,循环往复,直至得到超过预设数量的超参数组,并将训练效果评
搜索意图确定方法、装置、设备以及存储介质.pdf
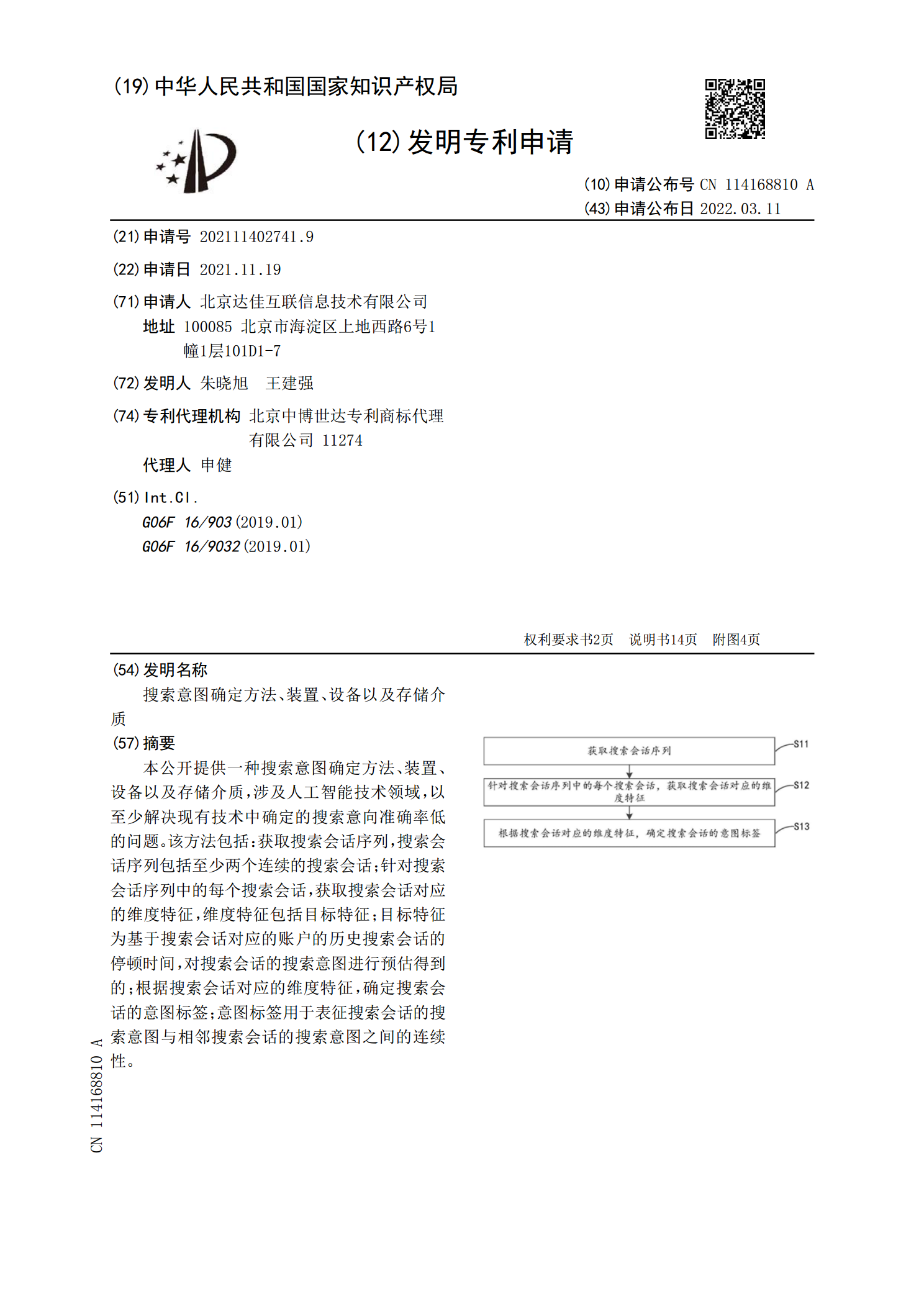
本公开提供一种搜索意图确定方法、装置、设备以及存储介质,涉及人工智能技术领域,以至少解决现有技术中确定的搜索意向准确率低的问题。该方法包括:获取搜索会话序列,搜索会话序列包括至少两个连续的搜索会话;针对搜索会话序列中的每个搜索会话,获取搜索会话对应的维度特征,维度特征包括目标特征;目标特征为基于搜索会话对应的账户的历史搜索会话的停顿时间,对搜索会话的搜索意图进行预估得到的;根据搜索会话对应的维度特征,确定搜索会话的意图标签;意图标签用于表征搜索会话的搜索意图与相邻搜索会话的搜索意图之间的连续性。
限速信息确定方法、装置、设备以及存储介质.pdf
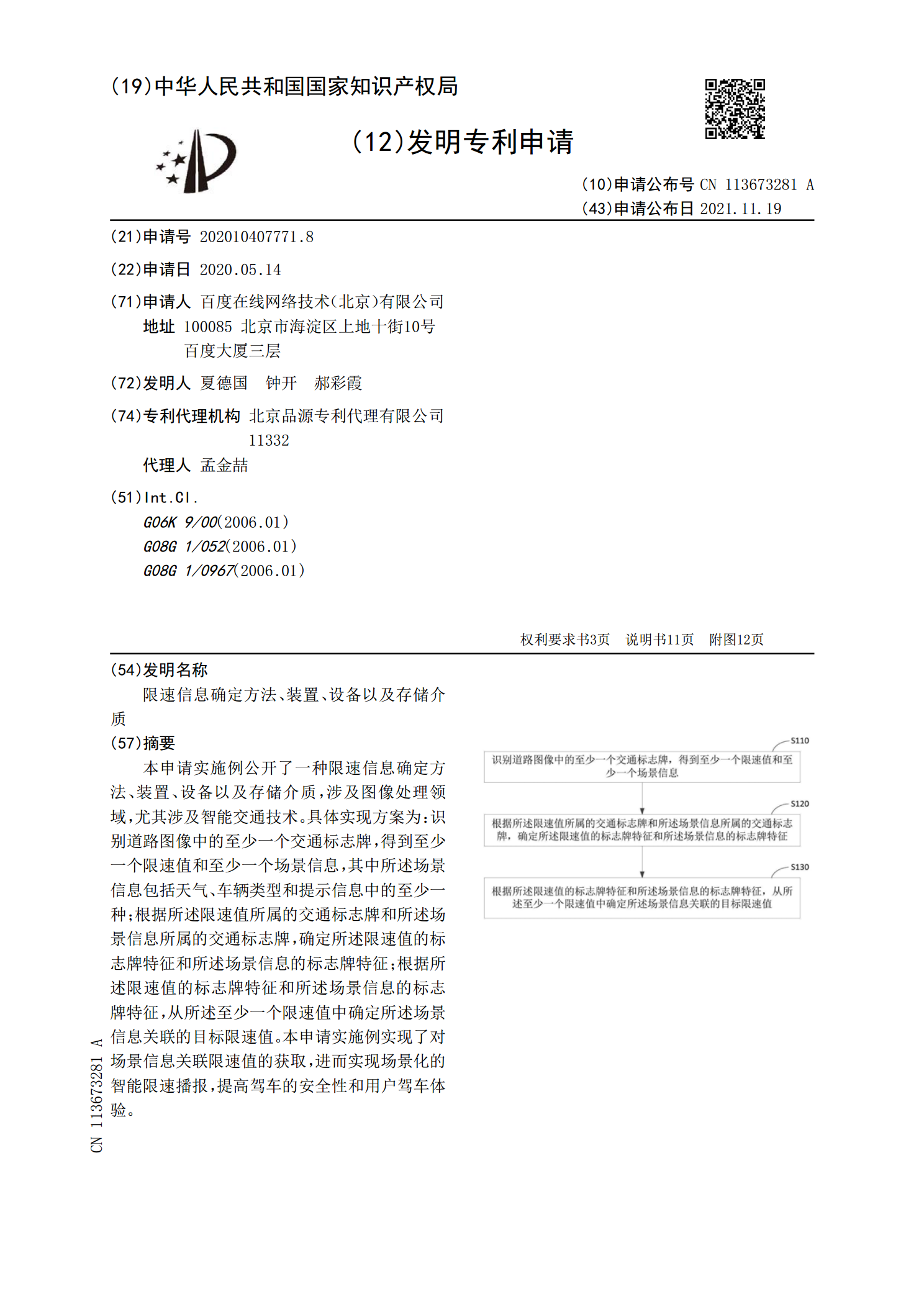
本申请实施例公开了一种限速信息确定方法、装置、设备以及存储介质,涉及图像处理领域,尤其涉及智能交通技术。具体实现方案为:识别道路图像中的至少一个交通标志牌,得到至少一个限速值和至少一个场景信息,其中所述场景信息包括天气、车辆类型和提示信息中的至少一种;根据所述限速值所属的交通标志牌和所述场景信息所属的交通标志牌,确定所述限速值的标志牌特征和所述场景信息的标志牌特征;根据所述限速值的标志牌特征和所述场景信息的标志牌特征,从所述至少一个限速值中确定所述场景信息关联的目标限速值。本申请实施例实现了对场景信息关联