
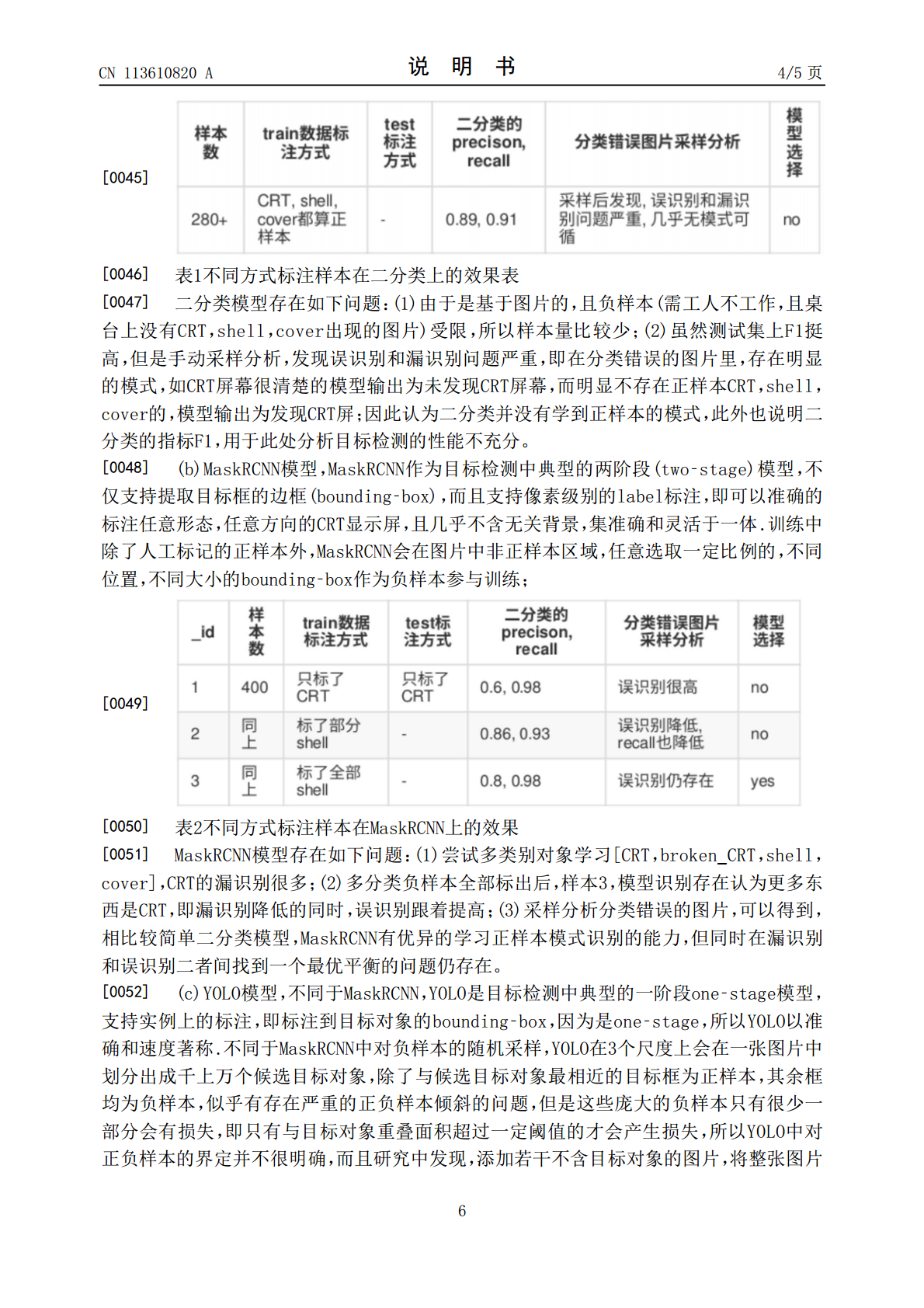
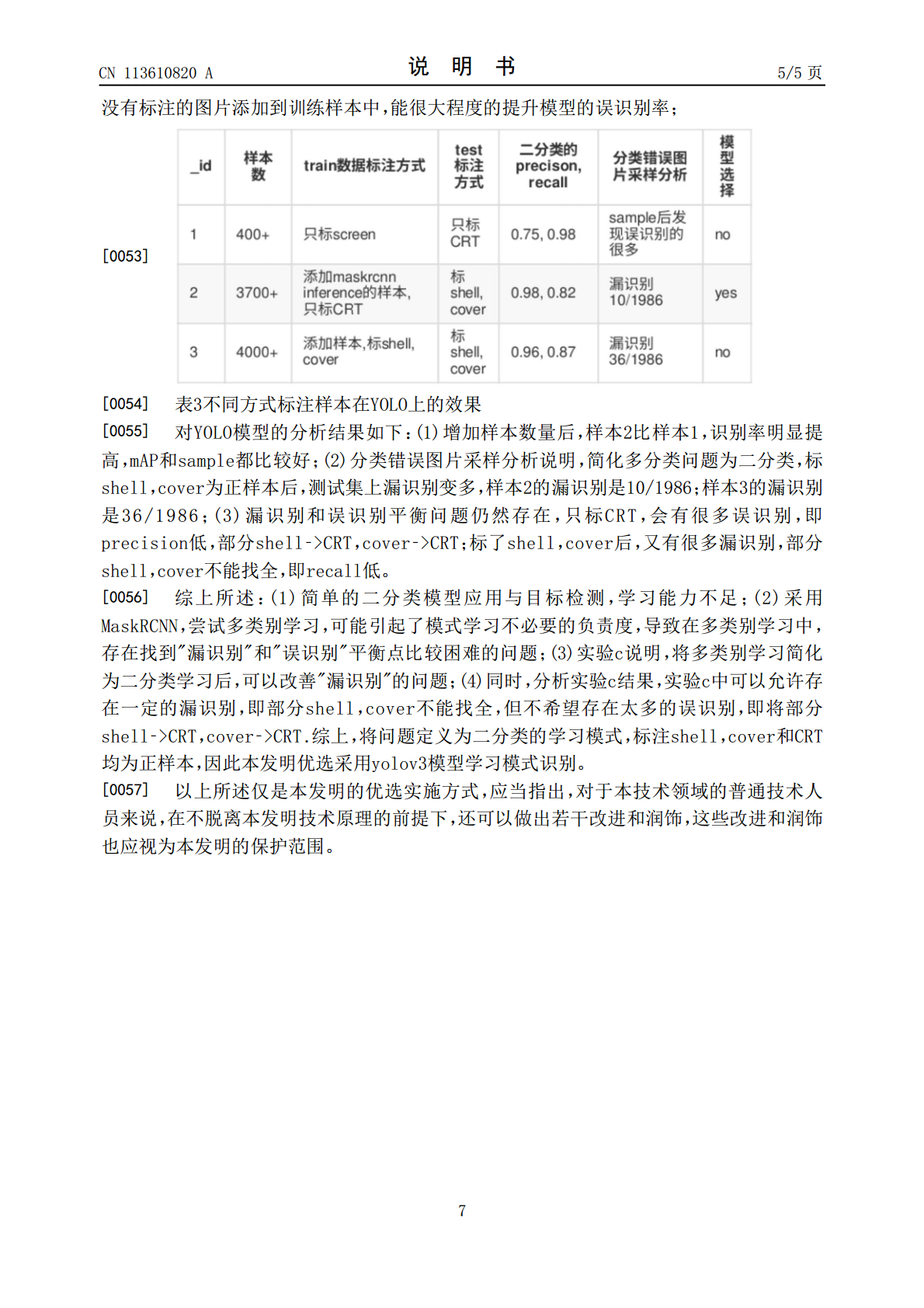
一种基于深度学习算法的工位目标检测系统.pdf

文阁****23

1/8
2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于深度学习算法的工位目标检测系统.pdf
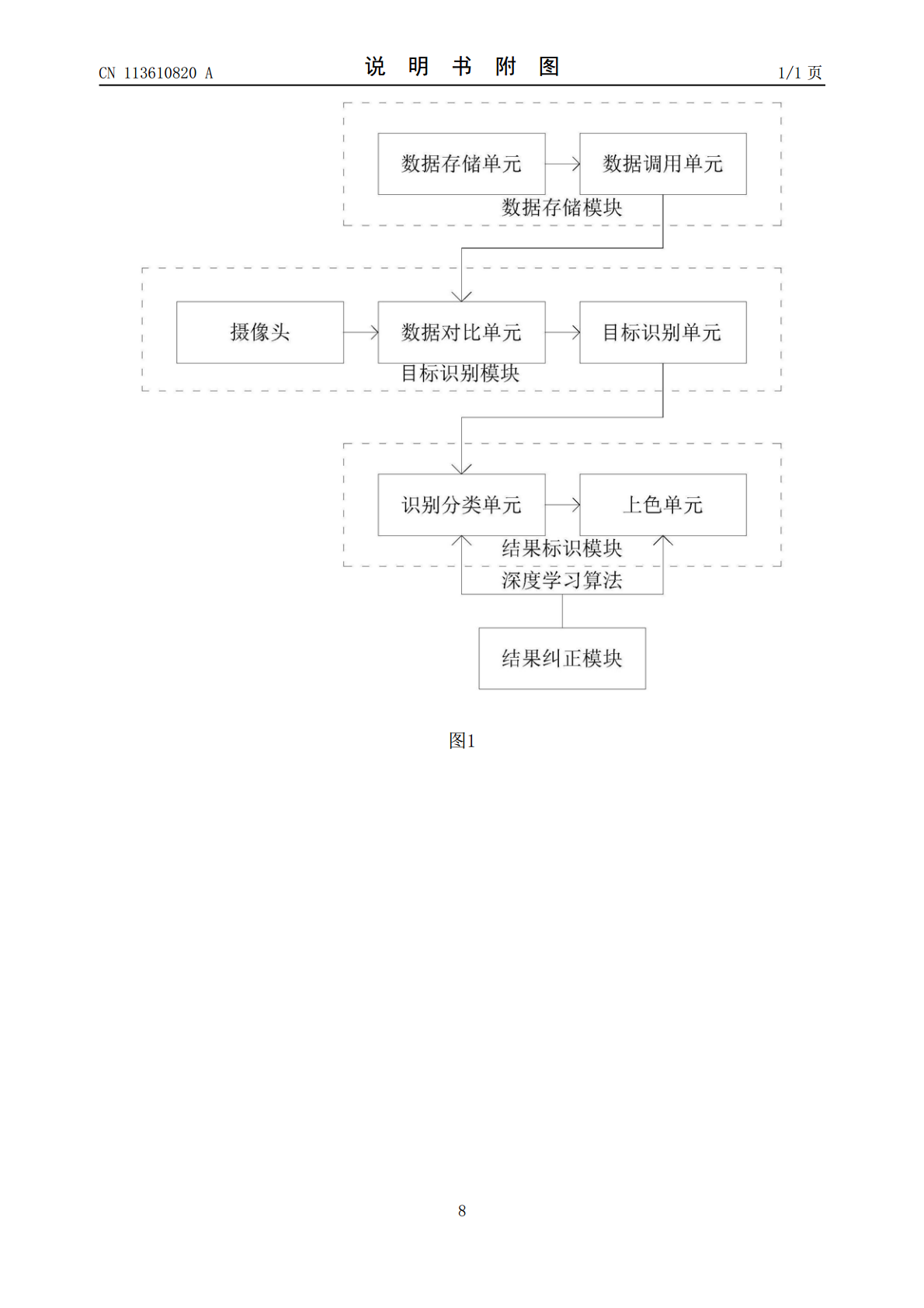
本发明公开了一种基于深度学习算法的工位目标检测系统,包括:数据存储模块、目标识别模块、结果标识模块和结果纠正模块。本发明提供的基于深度学习算法的工位目标检测系统通过结果纠正模块对目标识别模块中数据对比结果进行人为判断,并对对比结果进行纠正,通过深度学习算法优化目标识别模块的识别算法,提高目标识别精度,即结果标识的准确性。
基于多视角深度学习算法的异常行为目标检测系统.pdf
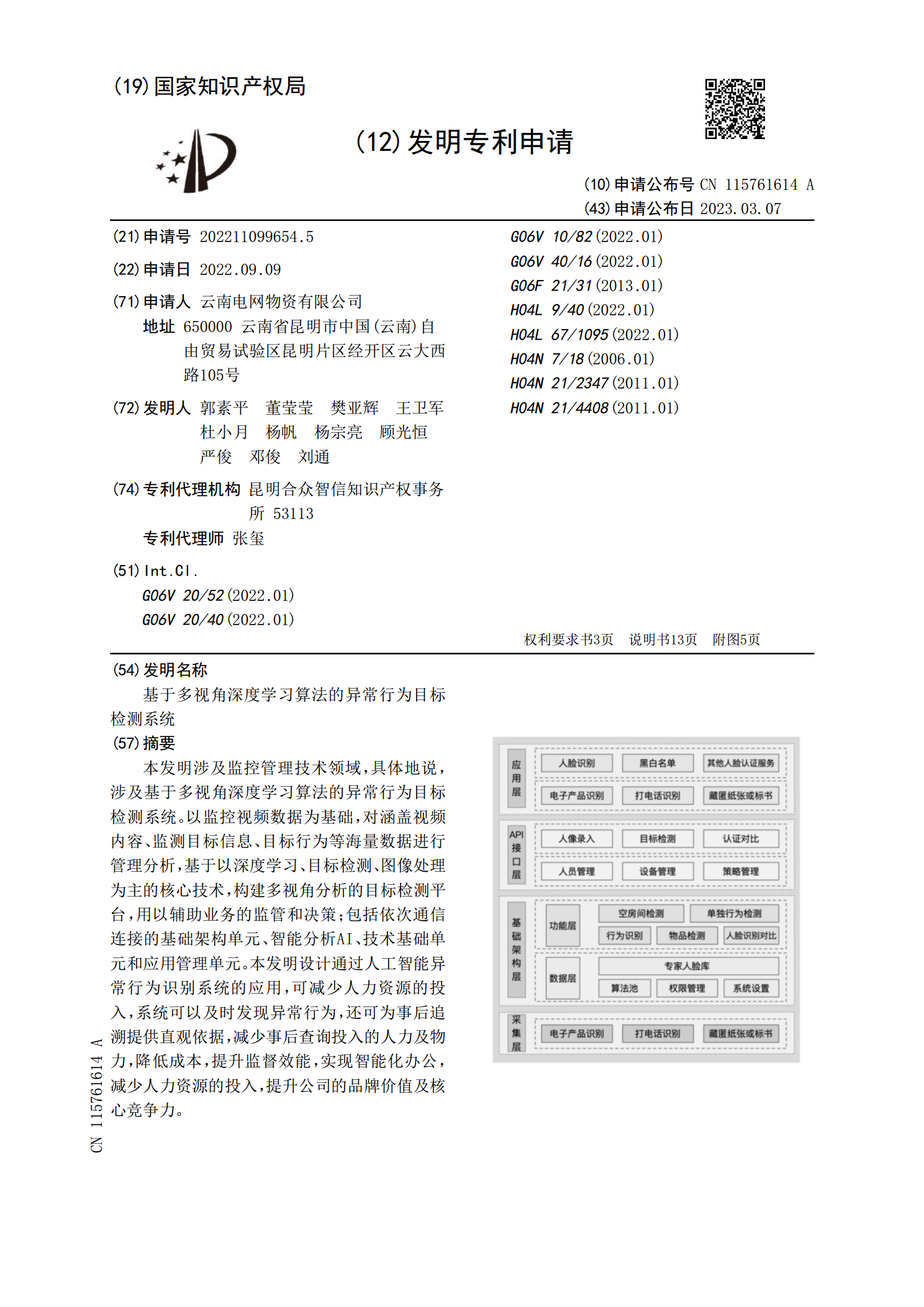
本发明涉及监控管理技术领域,具体地说,涉及基于多视角深度学习算法的异常行为目标检测系统。以监控视频数据为基础,对涵盖视频内容、监测目标信息、目标行为等海量数据进行管理分析,基于以深度学习、目标检测、图像处理为主的核心技术,构建多视角分析的目标检测平台,用以辅助业务的监管和决策;包括依次通信连接的基础架构单元、智能分析AI、技术基础单元和应用管理单元。本发明设计通过人工智能异常行为识别系统的应用,可减少人力资源的投入,系统可以及时发现异常行为,还可为事后追溯提供直观依据,减少事后查询投入的人力及物力,降低成

一种基于深度学习算法的仓储异常目标检测方法及系统.pdf
本发明涉及一种基于深度学习算法的仓储异常目标检测方法及系统,该方法包括:构建基于深度学习算法的仓储异常目标检测网络;以数据增加处理后的仓储视频监控图像为训练集,训练仓储异常目标检测网络,获得仓储异常目标检测模型;利用仓储异常目标检测模型对待检测仓储视频监控图像进行异常目标检测;仓储异常目标检测网络包括依次连接的骨干网络、多尺度特征融合网络和预测层;骨干网络为改进的ResNet34残差网络,改进的ResNet34残差网络的激活函数为Mish激活函数,改进的ResNet34残差网络包括批量标归一化层。本发明提
一种基于深度学习目标检测和分类技术的火焰检测算法.pdf
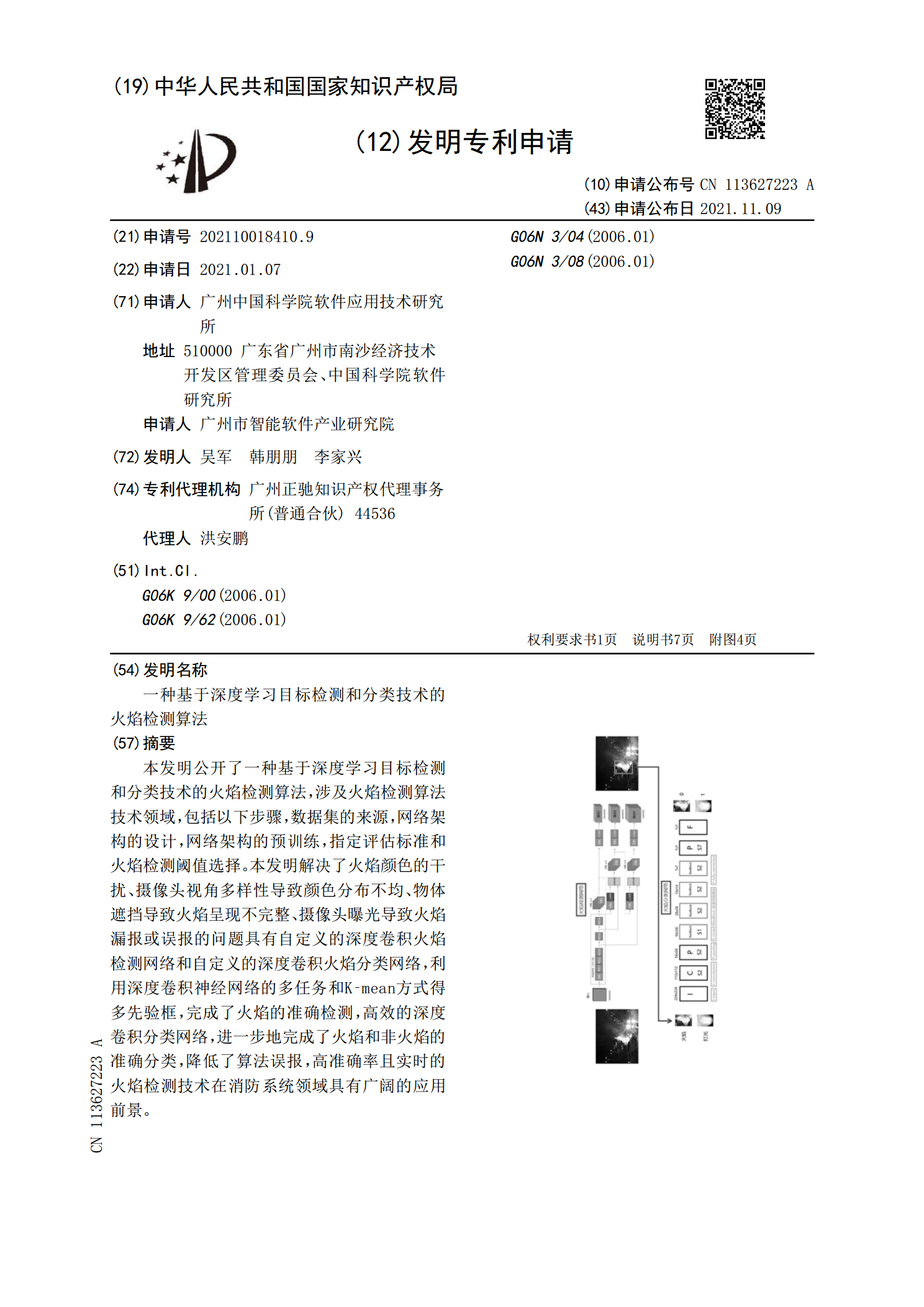
本发明公开了一种基于深度学习目标检测和分类技术的火焰检测算法,涉及火焰检测算法技术领域,包括以下步骤,数据集的来源,网络架构的设计,网络架构的预训练,指定评估标准和火焰检测阈值选择。本发明解决了火焰颜色的干扰、摄像头视角多样性导致颜色分布不均、物体遮挡导致火焰呈现不完整、摄像头曝光导致火焰漏报或误报的问题具有自定义的深度卷积火焰检测网络和自定义的深度卷积火焰分类网络,利用深度卷积神经网络的多任务和K‑mean方式得多先验框,完成了火焰的准确检测,高效的深度卷积分类网络,进一步地完成了火焰和非火焰的准确分类
一种基于可解释深度学习算法的循环肿瘤细胞检测系统.pdf
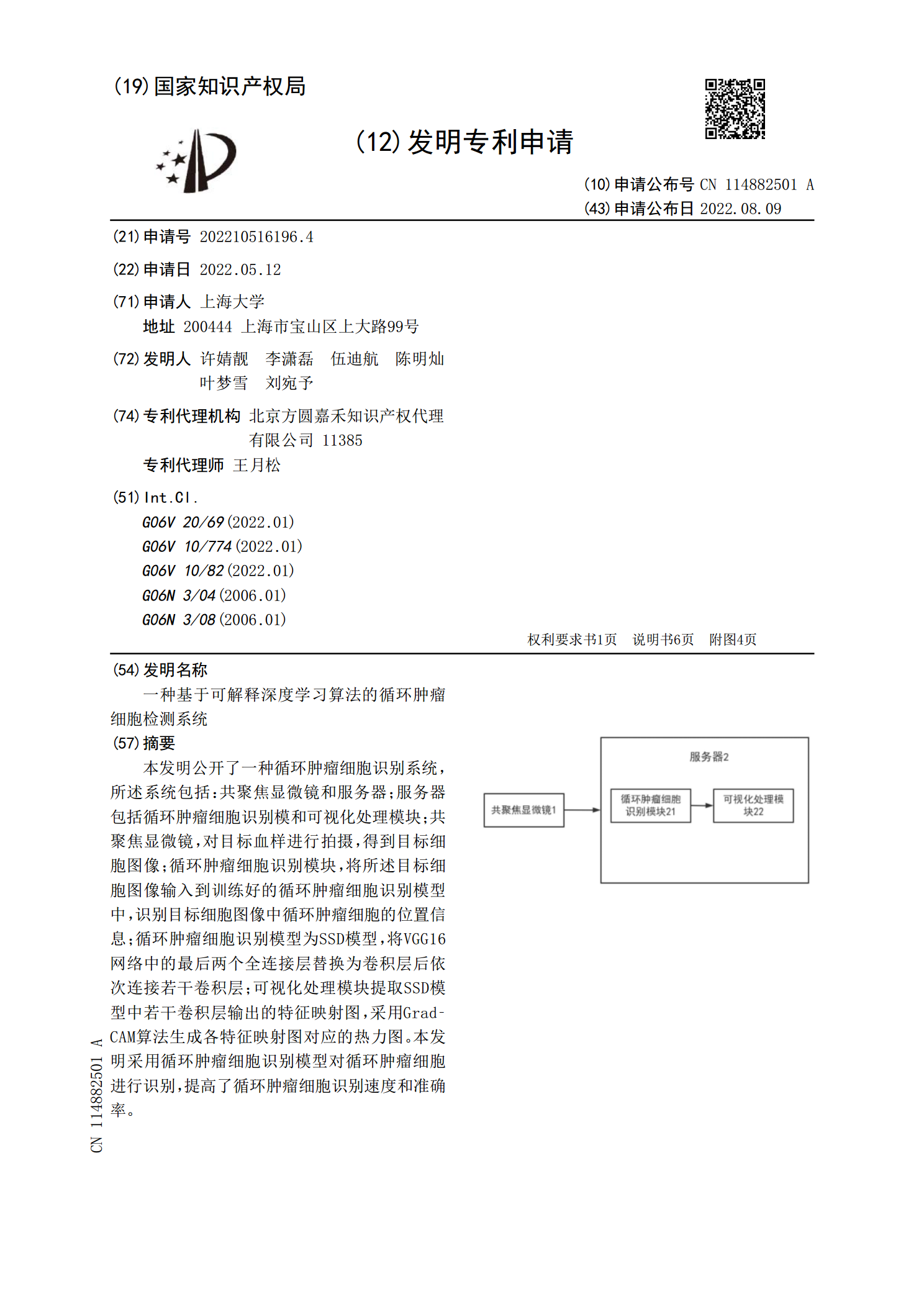
本发明公开了一种循环肿瘤细胞识别系统,所述系统包括:共聚焦显微镜和服务器;服务器包括循环肿瘤细胞识别模和可视化处理模块;共聚焦显微镜,对目标血样进行拍摄,得到目标细胞图像;循环肿瘤细胞识别模块,将所述目标细胞图像输入到训练好的循环肿瘤细胞识别模型中,识别目标细胞图像中循环肿瘤细胞的位置信息;循环肿瘤细胞识别模型为SSD模型,将VGG16网络中的最后两个全连接层替换为卷积层后依次连接若干卷积层;可视化处理模块提取SSD模型中若干卷积层输出的特征映射图,采用Grad?CAM算法生成各特征映射图对应的热力图。本