
一种机器人运动控制方法、系统及机器人.pdf

靖烟****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人运动控制的方法、运动控制装置及机器人系统.pdf
一种机器人运动控制的方法、运动控制装置(810)及机器人系统,用于提高机器人和外部传送带之间的同步精度,使机器人更准确地抓取外部传送带上的物体。该方法应用于运动控制装置(810),运动控制装置(810)包含有控制环和运动仿真模型,该方法包括:通过控制环获取传送带的实际运动参数,并根据实际运动参数和机器人上轮周期的第一运动参数生成模拟运动参数(201),第一运动参数由运动仿真模型生成并反馈,控制环用于接收运动仿真模型的反馈;通过运动仿真模型根据模拟运动参数生成机器人本轮周期的第二运动参数,并向控制环反馈第二

一种机器人运动控制方法、系统及机器人.pdf
本发明涉及一种机器人运动控制方法、系统及机器人,包括以下步骤:获取机器人末端在目标轨迹的当前点在机器人基坐标系下的实际坐标信息;根据当前点在机器人基坐标系下的实际坐标信息、预先设定的理想坐标信息及预先设置的扰动观测模型得到扰动估计值;根据扰动估计值、当前点在机器人基坐标系下的实际坐标信息、预先设定的理想坐标信息及预先设置的滑模控制器模型得到目标点的控制坐标信息;接收获得的目标点的控制坐标信息,控制机器人动作,使得机器人末端移动至目标点,本发明的方法能够实现机器人更高的定位精度和更强的鲁棒性。
一种机器人运动控制系统及控制方法.pdf
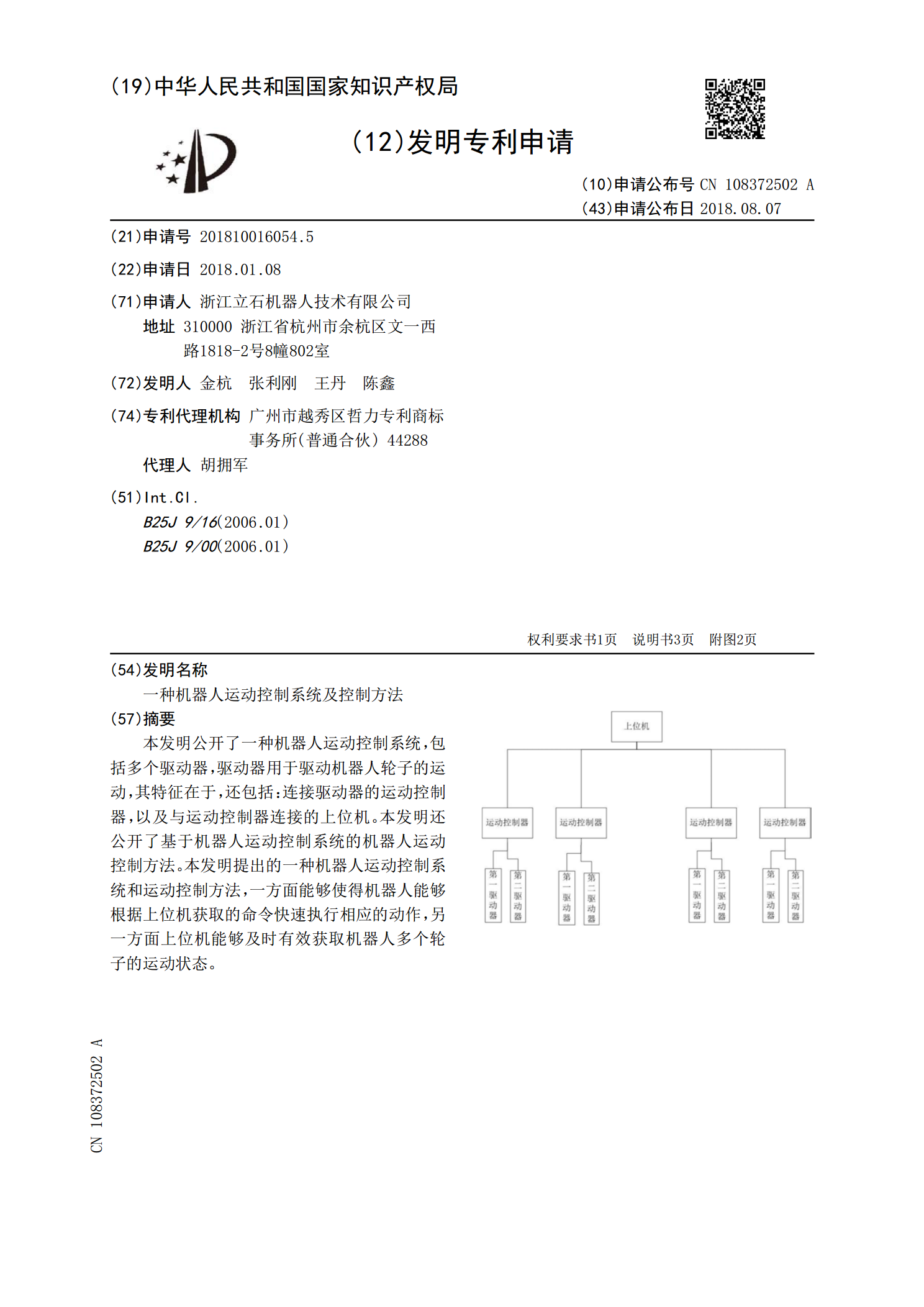
本发明公开了一种机器人运动控制系统,包括多个驱动器,驱动器用于驱动机器人轮子的运动,其特征在于,还包括:连接驱动器的运动控制器,以及与运动控制器连接的上位机。本发明还公开了基于机器人运动控制系统的机器人运动控制方法。本发明提出的一种机器人运动控制系统和运动控制方法,一方面能够使得机器人能够根据上位机获取的命令快速执行相应的动作,另一方面上位机能够及时有效获取机器人多个轮子的运动状态。

一种机器人运动控制方法和系统.pdf
本申请公开了一种机器人运动控制方法和系统,该方法包括:第一软件通过机器人上预留的接口获取所述机器人上的摄像头实时的视频;所述第一软件在视频显示界面显示所述机器人所在的预定空间对应的地图,其中,所述地图叠加在所述视频显示界面上进行显示,所述地图上显示有所述机器人在所述预定空间中的当前位置;所述第一软件根据所述地图和在所述视频显示界面显示视频向所述机器人发送命令,其中,所述命令用于控制所述机器人在所述地图上进行运动。通过本申请解决了现有技术中无法对机器人的进行很好的情况判断和控制的问题,从而可以明确知道机器人

一种机器人系统、机器人控制方法及机器人.pdf
本发明公开了一种机器人系统,包括电源模块、语音输入模块、侦测模块、图像采集模块、语音输出模块及控制器。语音输入模块用于接收外部语音信息。侦测模块用于获取机器人所处的当前环境的物体位置信息。图像采集模块用于采集当前环境的图像信息。控制器用于根据外部语音信息、当前环境的物体位置信息、当前环境的图像信息中的一个或多个信息来控制机器人的状态,或控制语音输出模块输出相应的交互内容。其中,当前环境的图像信息包括平面图像信息与深度图像信息。本发明还公开了一种机器人控制方法及机器人。上述机器人、机器人系统及机器人控制方法