
一种基于双目区域视差的原木堆垛动态检尺系统和方法.pdf

小凌****甜蜜

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于双目区域视差的原木堆垛动态检尺系统和方法.pdf
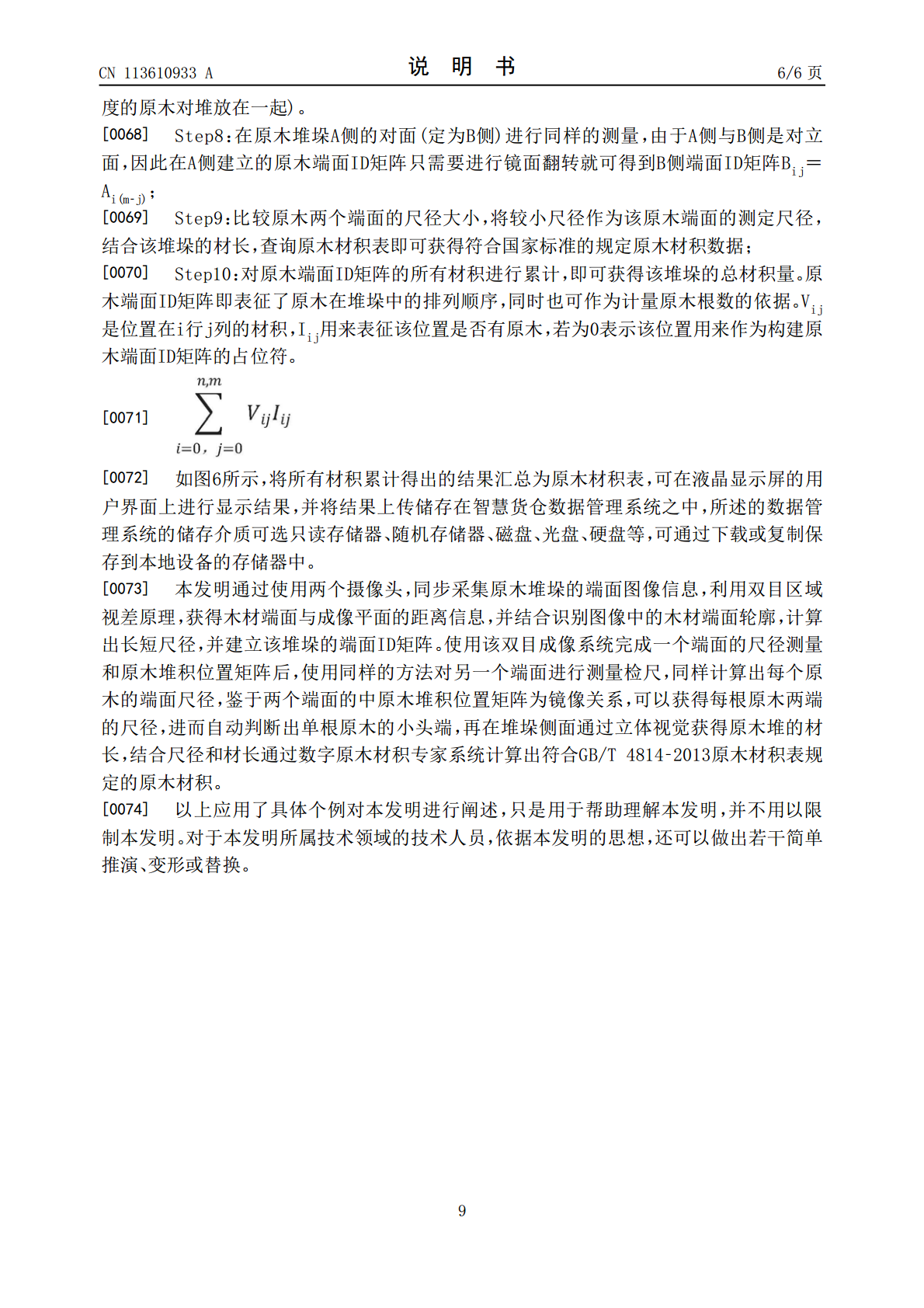
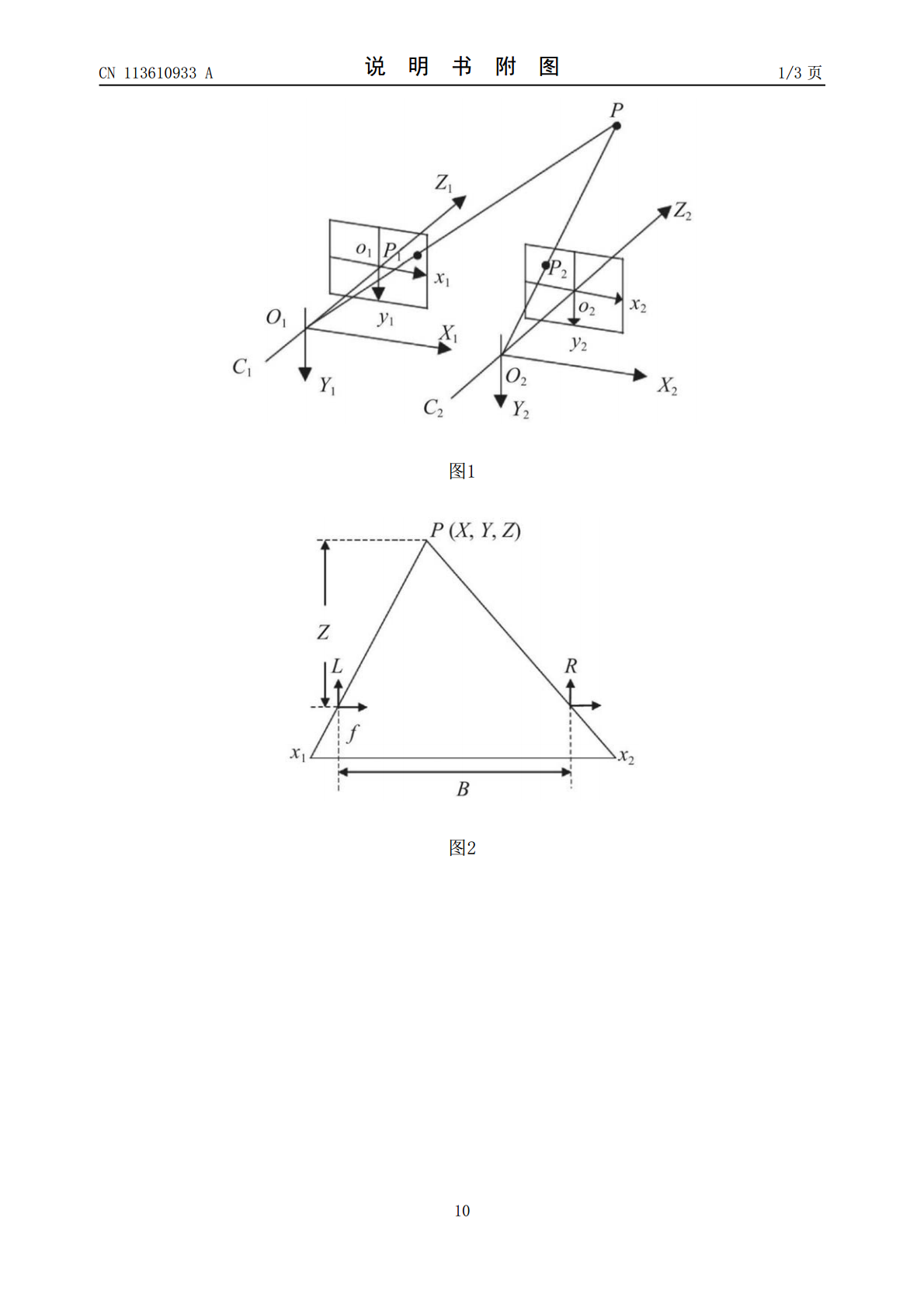
一种基于双目区域视差的原木堆垛动态检尺系统和方法,本发明涉及机器视觉检尺技术领域,本发明通过使用两个摄像头,同步采集原木堆垛的端面图像信息,利用双目区域视差原理,获得木材端面与成像平面的距离信息,并结合识别图像中的木材端面轮廓,计算出长短尺径,并建立该堆垛的端面ID矩阵,使用同样的方法对另一个端面进行测量检尺,同样计算出每个原木的端面尺径,再在堆垛侧面通过立体视觉获得原木堆的材长,结合尺径和材长通过数字原木材积专家系统计算出符合GB/T4814‑2013原木材积表规定的原木材积。本发明可以实现对货场中不
基于深度网络和双目视觉的阴影区域视差计算方法和系统.pdf
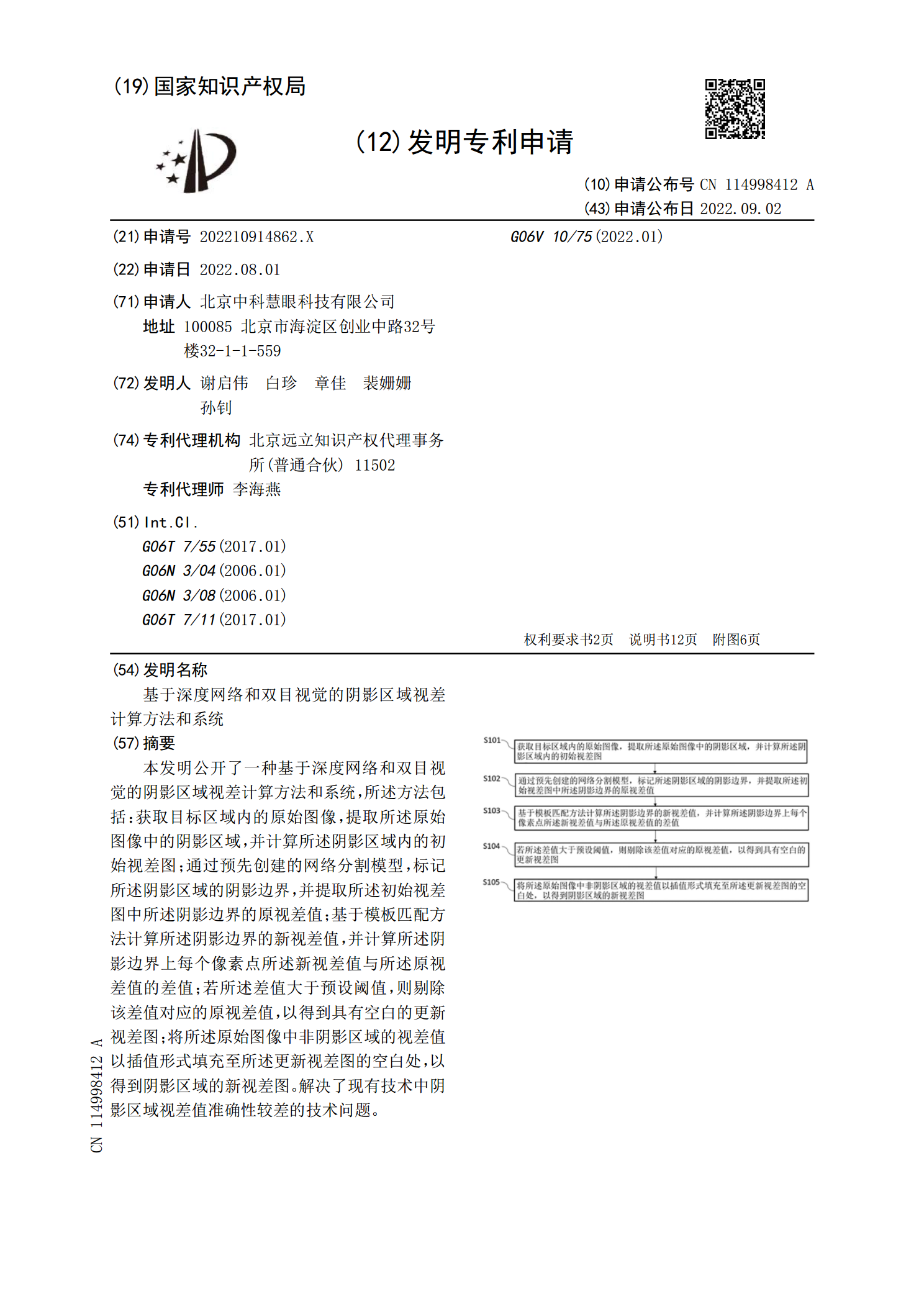
本发明公开了一种基于深度网络和双目视觉的阴影区域视差计算方法和系统,所述方法包括:获取目标区域内的原始图像,提取所述原始图像中的阴影区域,并计算所述阴影区域内的初始视差图;通过预先创建的网络分割模型,标记所述阴影区域的阴影边界,并提取所述初始视差图中所述阴影边界的原视差值;基于模板匹配方法计算所述阴影边界的新视差值,并计算所述阴影边界上每个像素点所述新视差值与所述原视差值的差值;若所述差值大于预设阈值,则剔除该差值对应的原视差值,以得到具有空白的更新视差图;将所述原始图像中非阴影区域的视差值以插值形式填充
一种原木检尺方法和装置.pdf
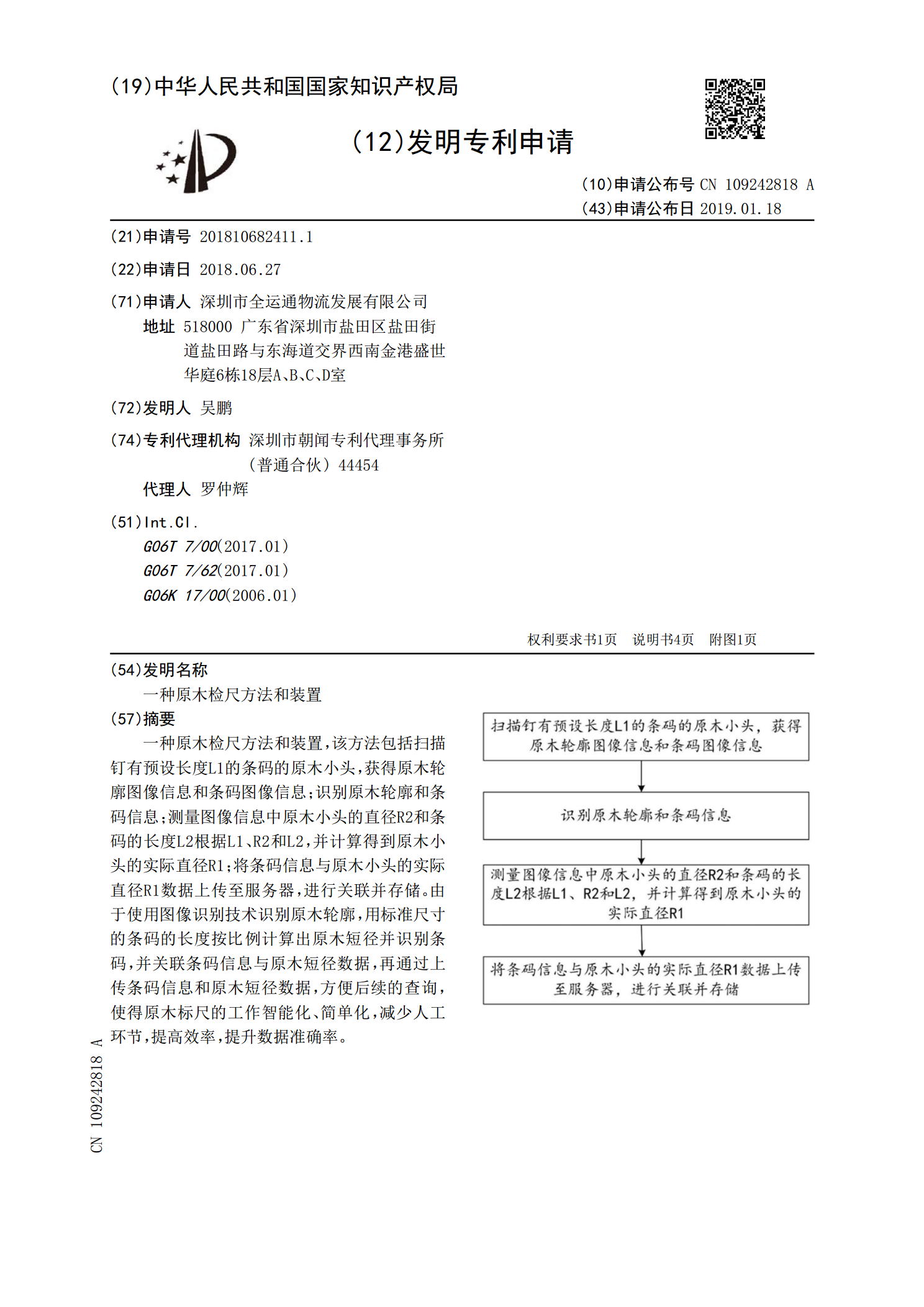
一种原木检尺方法和装置,该方法包括扫描钉有预设长度L1的条码的原木小头,获得原木轮廓图像信息和条码图像信息;识别原木轮廓和条码信息;测量图像信息中原木小头的直径R2和条码的长度L2根据L1、R2和L2,并计算得到原木小头的实际直径R1;将条码信息与原木小头的实际直径R1数据上传至服务器,进行关联并存储。由于使用图像识别技术识别原木轮廓,用标准尺寸的条码的长度按比例计算出原木短径并识别条码,并关联条码信息与原木短径数据,再通过上传条码信息和原木短径数据,方便后续的查询,使得原木标尺的工作智能化、简单化,减少
一种基于双目视差计算的木工家具高精度装配系统及方法.pdf
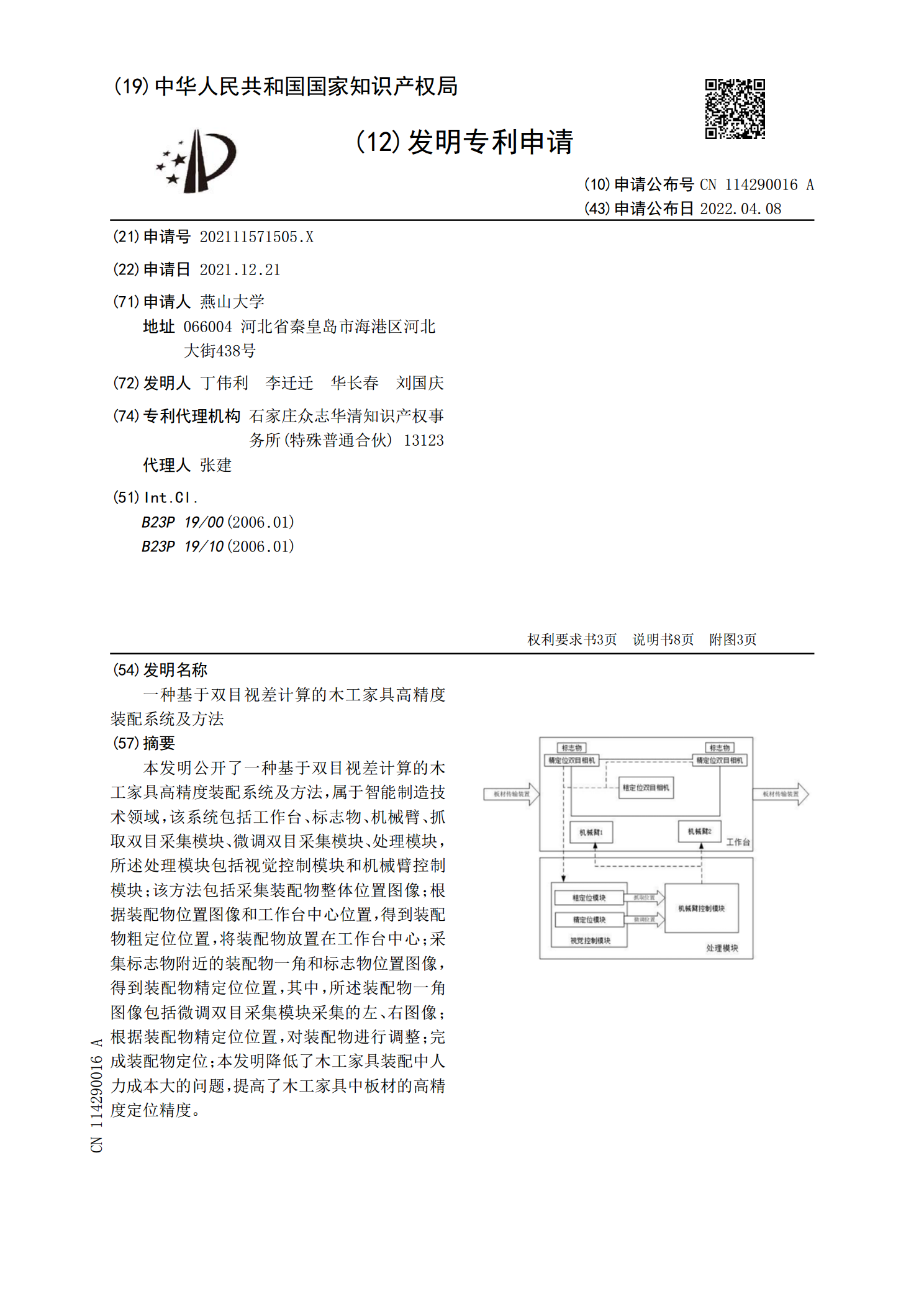
本发明公开了一种基于双目视差计算的木工家具高精度装配系统及方法,属于智能制造技术领域,该系统包括工作台、标志物、机械臂、抓取双目采集模块、微调双目采集模块、处理模块,所述处理模块包括视觉控制模块和机械臂控制模块;该方法包括采集装配物整体位置图像;根据装配物位置图像和工作台中心位置,得到装配物粗定位位置,将装配物放置在工作台中心;采集标志物附近的装配物一角和标志物位置图像,得到装配物精定位位置,其中,所述装配物一角图像包括微调双目采集模块采集的左、右图像;根据装配物精定位位置,对装配物进行调整;完成装配物定
一种基于双目立体数据动态认知的手势识别方法及系统.pdf
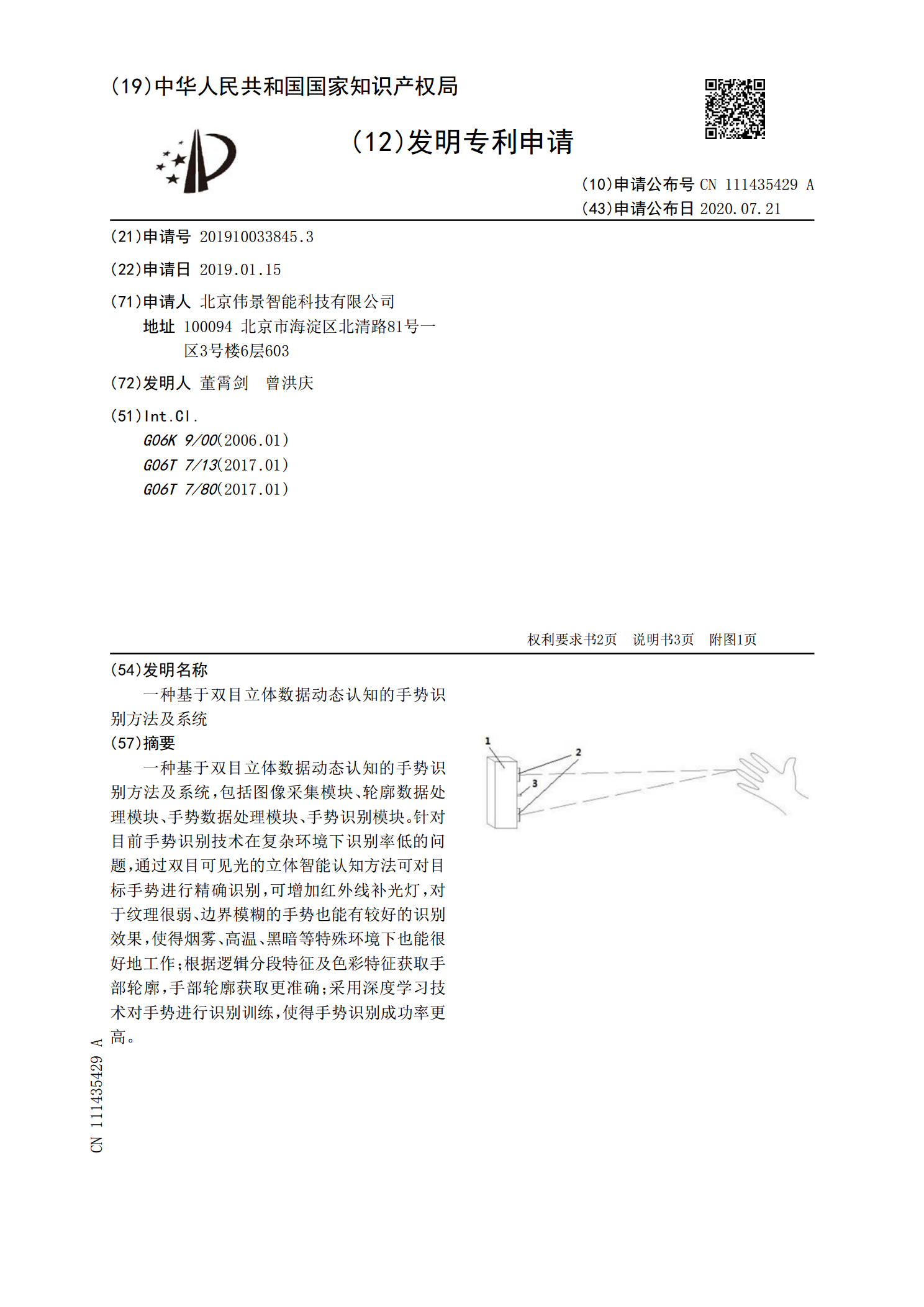
一种基于双目立体数据动态认知的手势识别方法及系统,包括图像采集模块、轮廓数据处理模块、手势数据处理模块、手势识别模块。针对目前手势识别技术在复杂环境下识别率低的问题,通过双目可见光的立体智能认知方法可对目标手势进行精确识别,可增加红外线补光灯,对于纹理很弱、边界模糊的手势也能有较好的识别效果,使得烟雾、高温、黑暗等特殊环境下也能很好地工作;根据逻辑分段特征及色彩特征获取手部轮廓,手部轮廓获取更准确;采用深度学习技术对手势进行识别训练,使得手势识别成功率更高。