
一种反伪装智能光电跟踪瞄准镜.pdf

涵蓄****09


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种反伪装智能光电跟踪瞄准镜.pdf
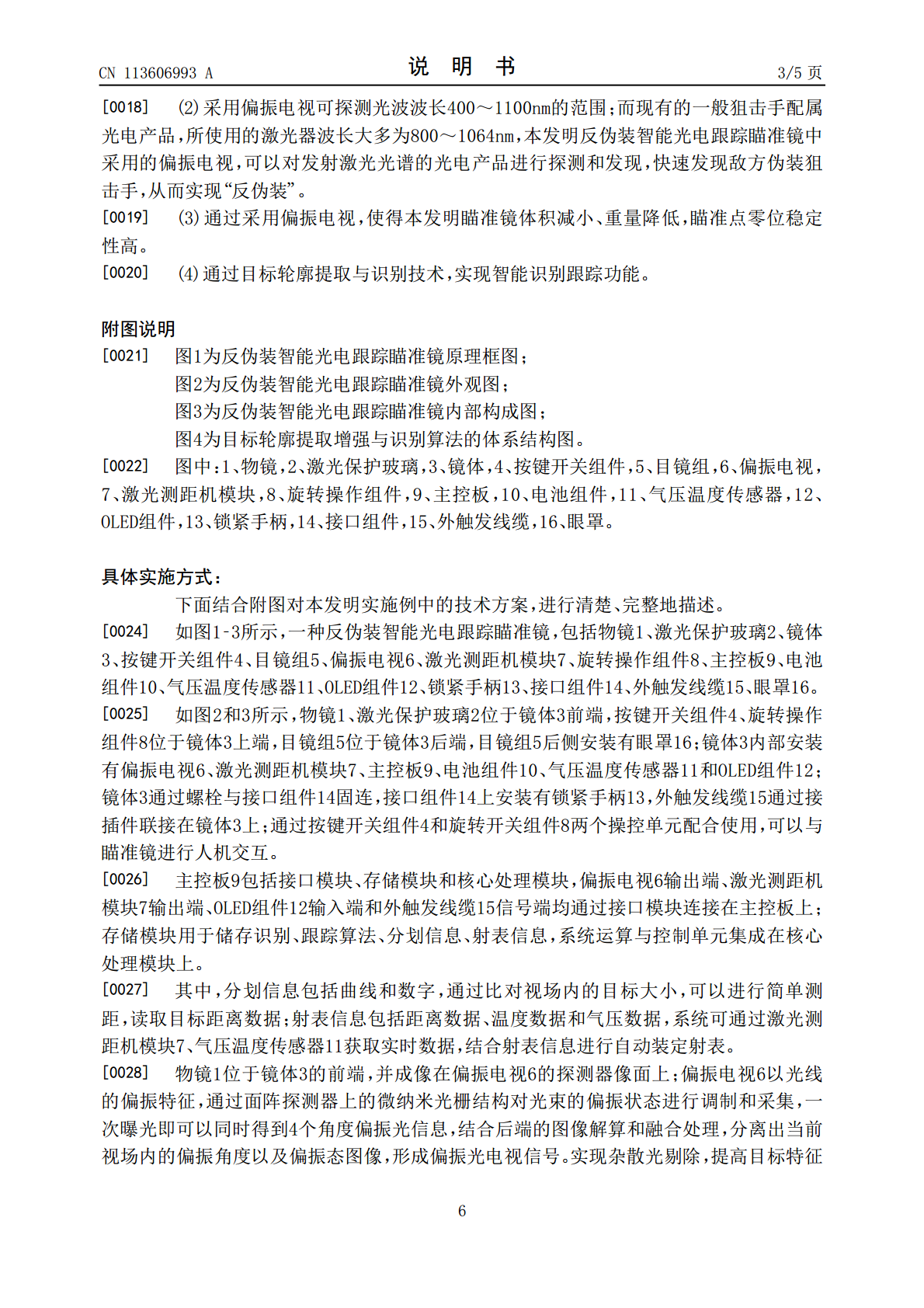
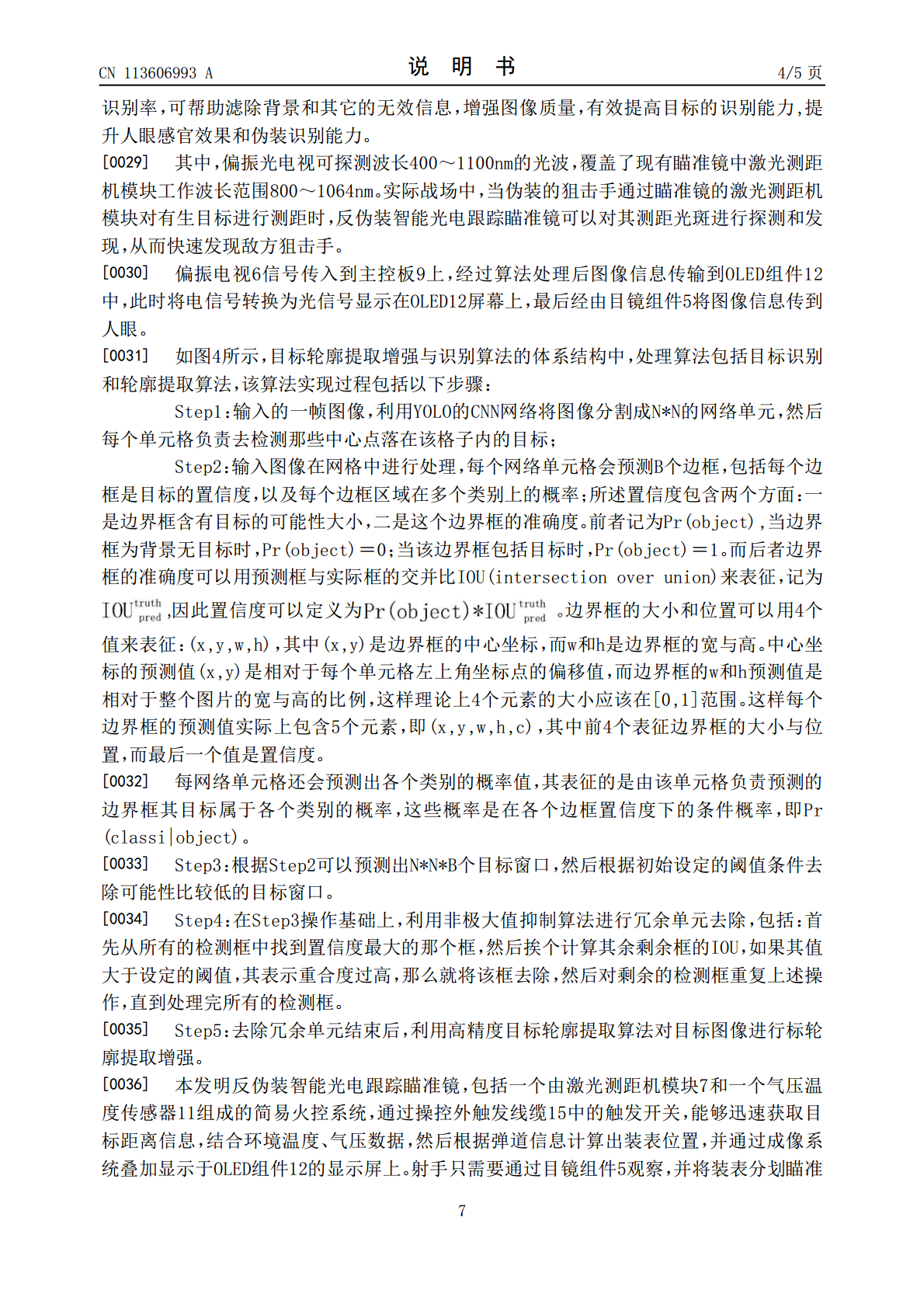
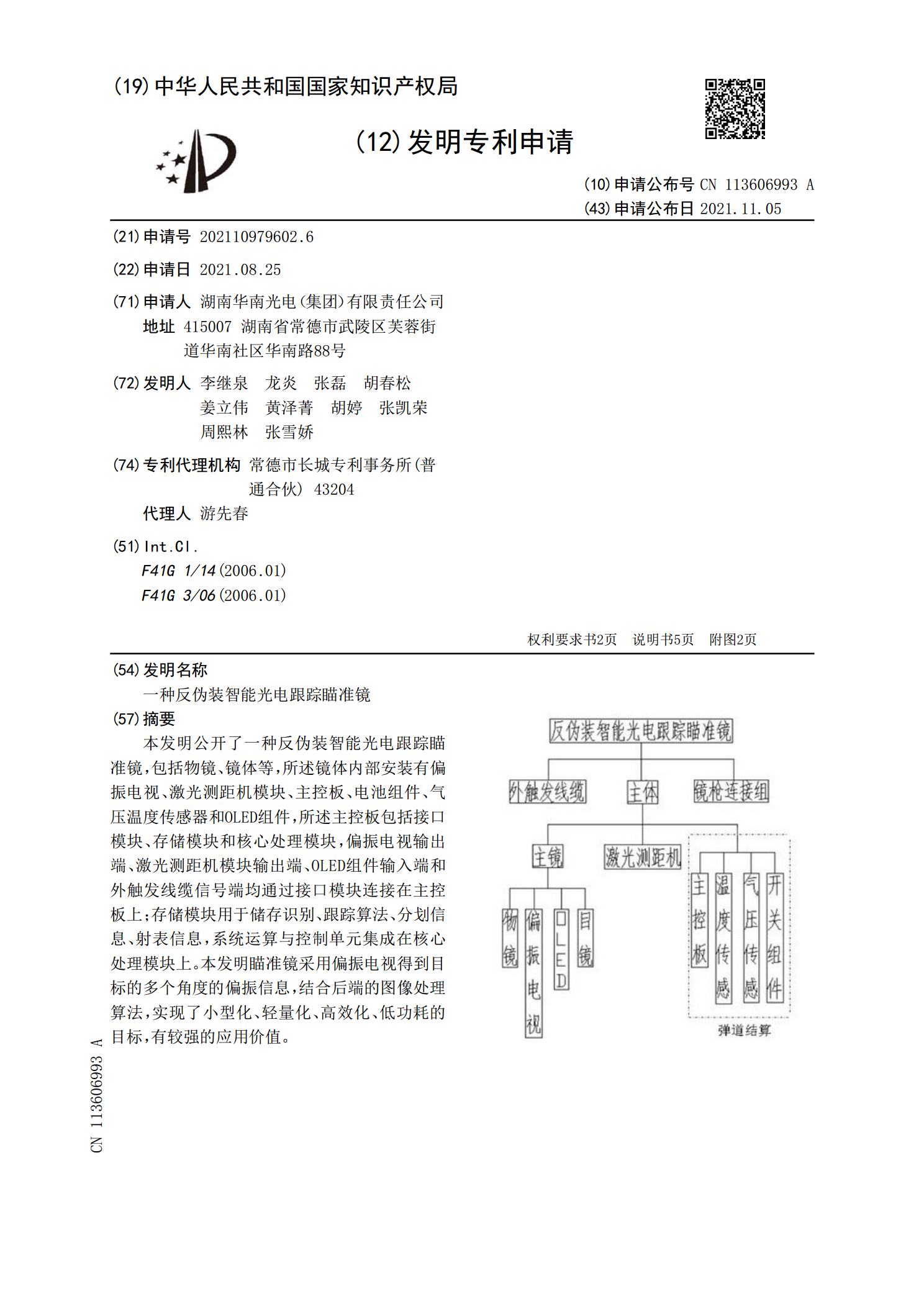
本发明公开了一种反伪装智能光电跟踪瞄准镜,包括物镜、镜体等,所述镜体内部安装有偏振电视、激光测距机模块、主控板、电池组件、气压温度传感器和OLED组件,所述主控板包括接口模块、存储模块和核心处理模块,偏振电视输出端、激光测距机模块输出端、OLED组件输入端和外触发线缆信号端均通过接口模块连接在主控板上;存储模块用于储存识别、跟踪算法、分划信息、射表信息,系统运算与控制单元集成在核心处理模块上。本发明瞄准镜采用偏振电视得到目标的多个角度的偏振信息,结合后端的图像处理算法,实现了小型化、轻量化、高效化、低功耗
一种水域探测系统中多光电智能跟踪方法.pdf
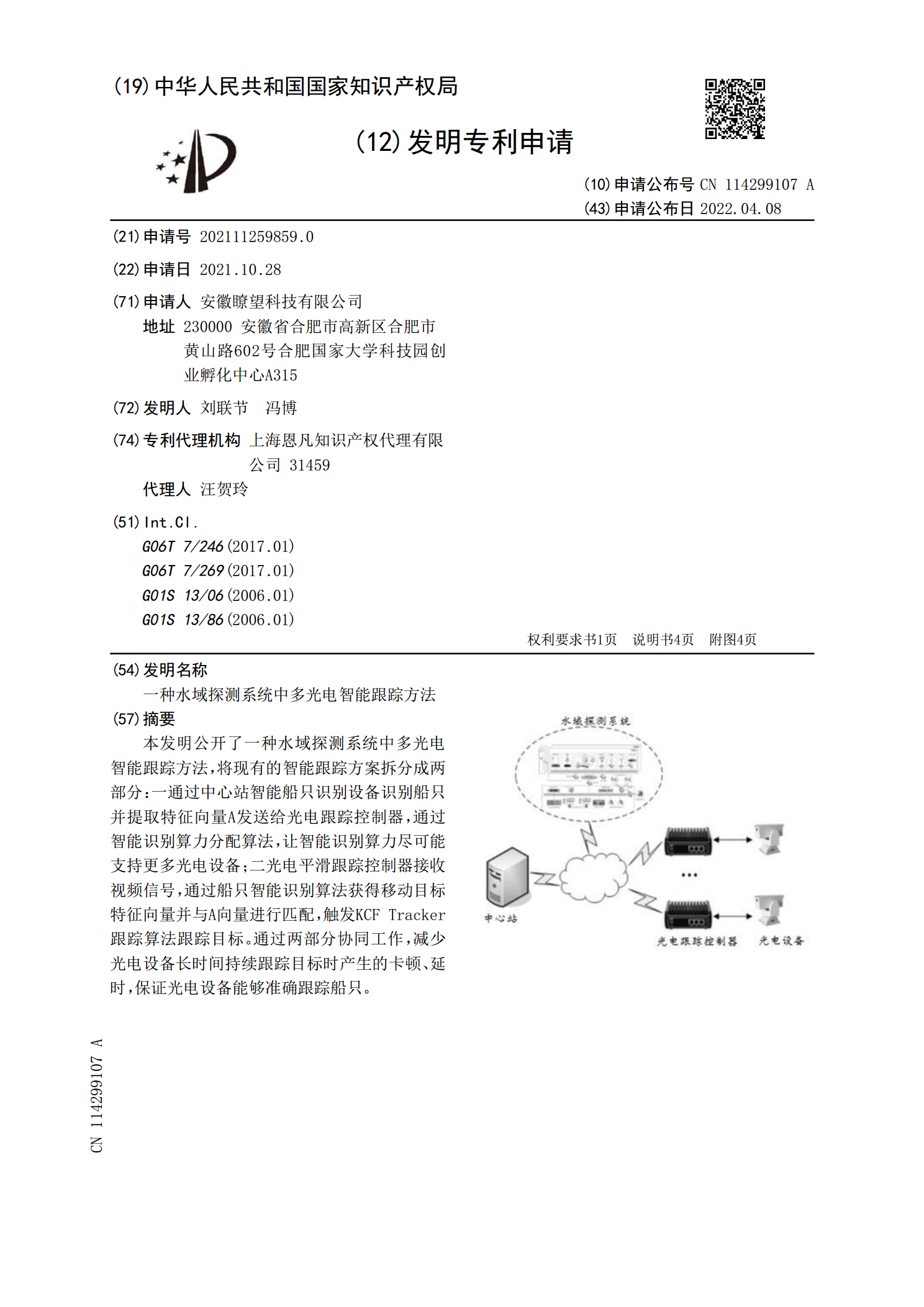
本发明公开了一种水域探测系统中多光电智能跟踪方法,将现有的智能跟踪方案拆分成两部分:一通过中心站智能船只识别设备识别船只并提取特征向量A发送给光电跟踪控制器,通过智能识别算力分配算法,让智能识别算力尽可能支持更多光电设备;二光电平滑跟踪控制器接收视频信号,通过船只智能识别算法获得移动目标特征向量并与A向量进行匹配,触发KCFTracker跟踪算法跟踪目标。通过两部分协同工作,减少光电设备长时间持续跟踪目标时产生的卡顿、延时,保证光电设备能够准确跟踪船只。

智能优化的光电跟踪伺服系统设计.docx
智能优化的光电跟踪伺服系统设计随着现代化技术不断发展,智能优化的光电跟踪伺服系统的应用越来越广泛。其可以应用于太阳能追踪、航空、卫星和导弹等领域。本文旨在讨论智能优化的光电跟踪伺服系统的设计,重点考虑其应用于太阳能追踪的情况下的特点和优化方法。一、光电跟踪伺服系统的原理及应用特点在光电跟踪伺服系统中,其主要原理是通过采用光电传感器来进行目标跟踪。其中的光电传感器可以根据需要进行替换,从而实现不同目标和不同精度的跟踪。当目标移动时,系统会自动调整其位置,从而实现持续性的跟踪和定位。在太阳能领域中,光电跟踪伺
一种军用智能自动化伪装武器.pdf
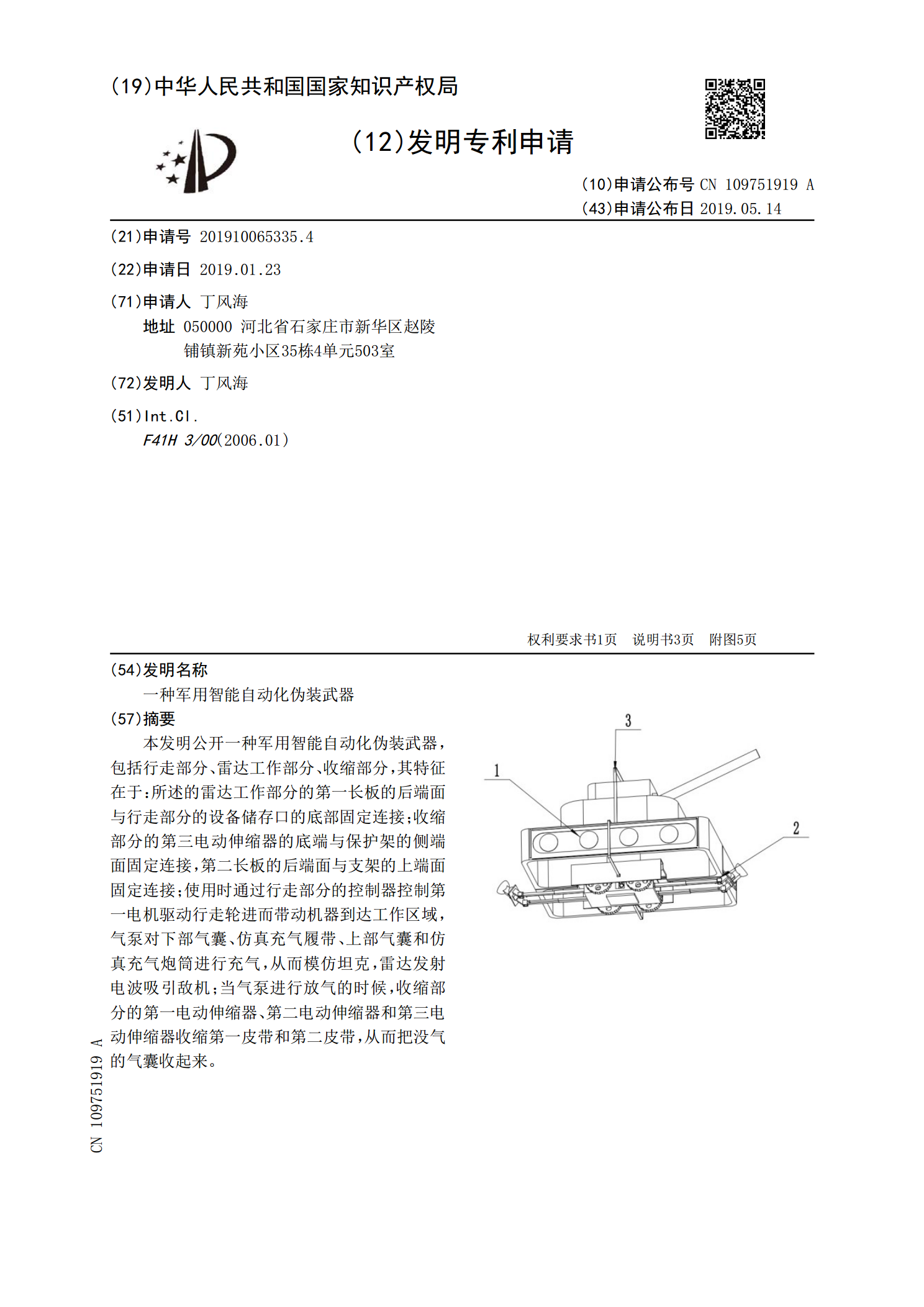
本发明公开一种军用智能自动化伪装武器,包括行走部分、雷达工作部分、收缩部分,其特征在于:所述的雷达工作部分的第一长板的后端面与行走部分的设备储存口的底部固定连接;收缩部分的第三电动伸缩器的底端与保护架的侧端面固定连接,第二长板的后端面与支架的上端面固定连接;使用时通过行走部分的控制器控制第一电机驱动行走轮进而带动机器到达工作区域,气泵对下部气囊、仿真充气履带、上部气囊和仿真充气炮筒进行充气,从而模仿坦克,雷达发射电波吸引敌机;当气泵进行放气的时候,收缩部分的第一电动伸缩器、第二电动伸缩器和第三电动伸缩器收
一种用于反狙击手机器人的光电跟踪图像对准方法.pdf
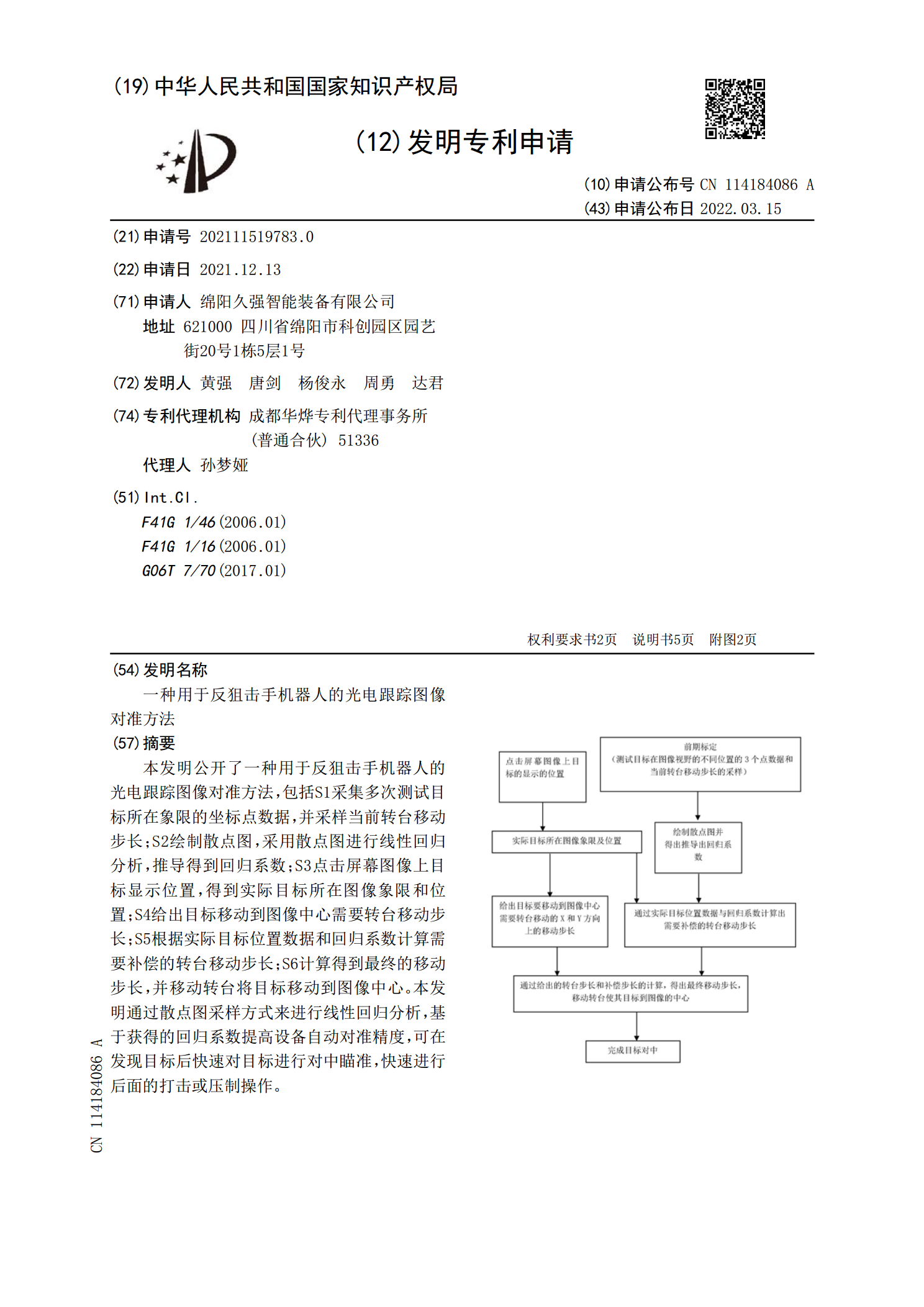
本发明公开了一种用于反狙击手机器人的光电跟踪图像对准方法,包括S1采集多次测试目标所在象限的坐标点数据,并采样当前转台移动步长;S2绘制散点图,采用散点图进行线性回归分析,推导得到回归系数;S3点击屏幕图像上目标显示位置,得到实际目标所在图像象限和位置;S4给出目标移动到图像中心需要转台移动步长;S5根据实际目标位置数据和回归系数计算需要补偿的转台移动步长;S6计算得到最终的移动步长,并移动转台将目标移动到图像中心。本发明通过散点图采样方式来进行线性回归分析,基于获得的回归系数提高设备自动对准精度,可在发