
一种水域探测系统中多光电智能跟踪方法.pdf

Ch****91

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种水域探测系统中多光电智能跟踪方法.pdf
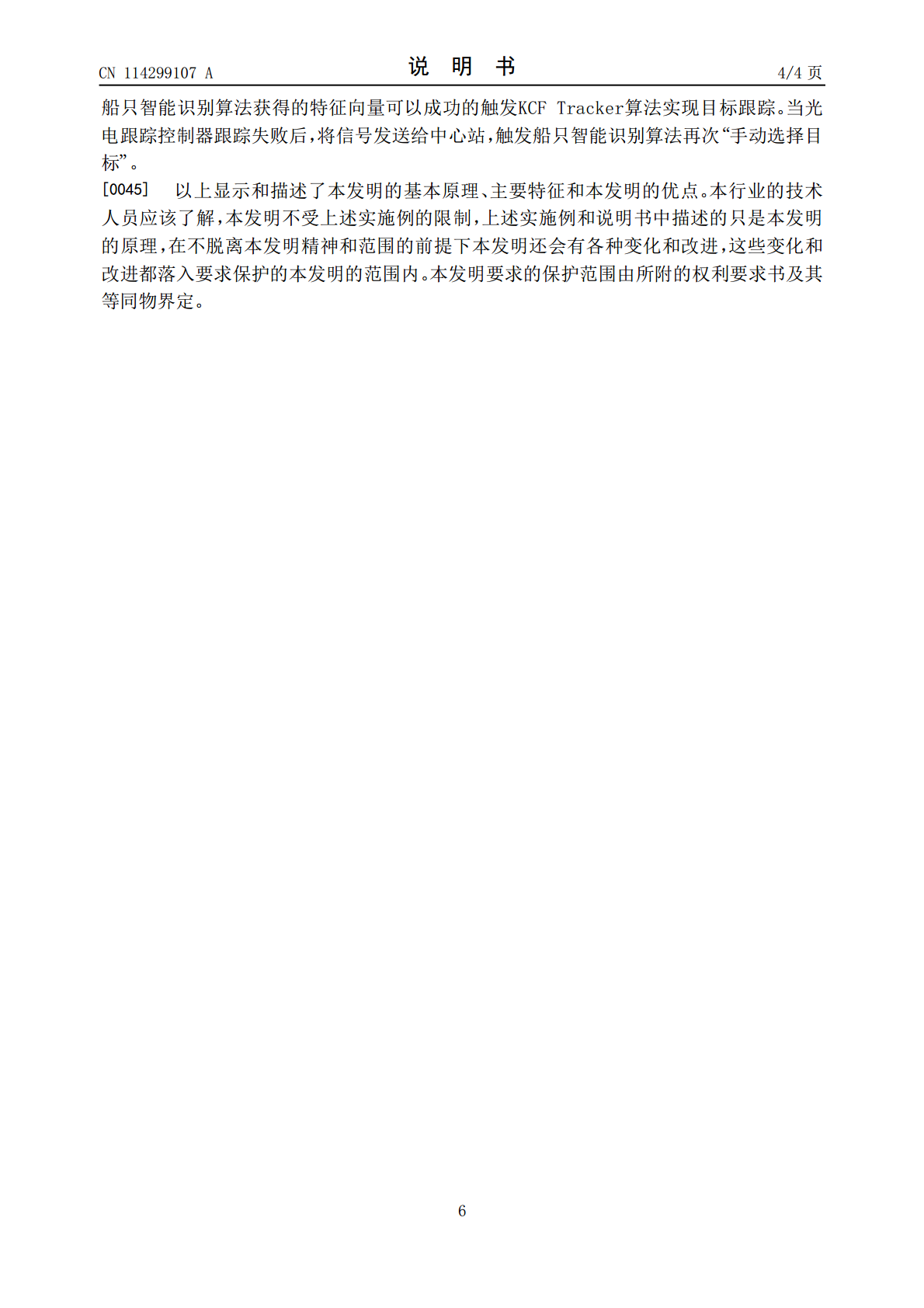
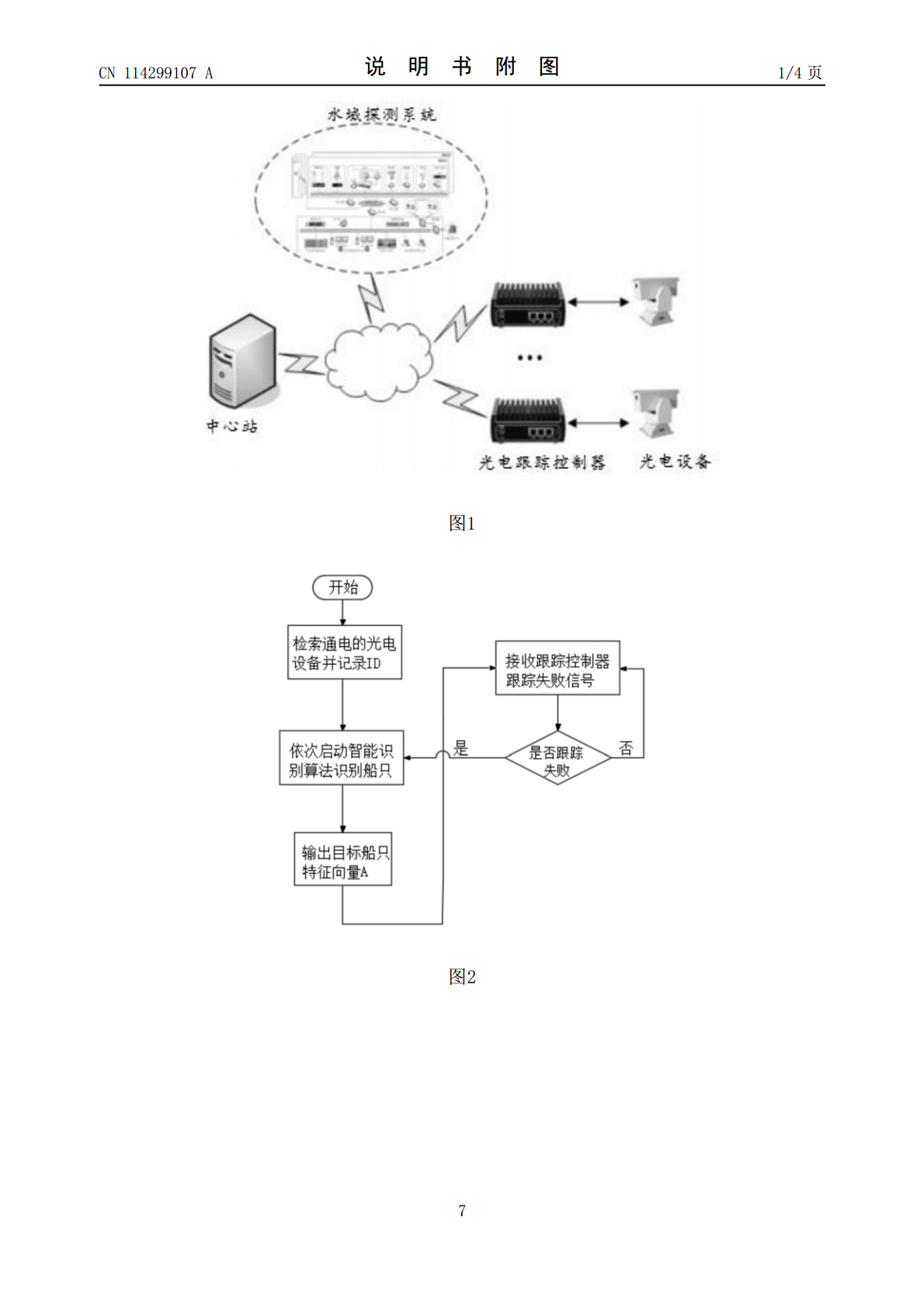
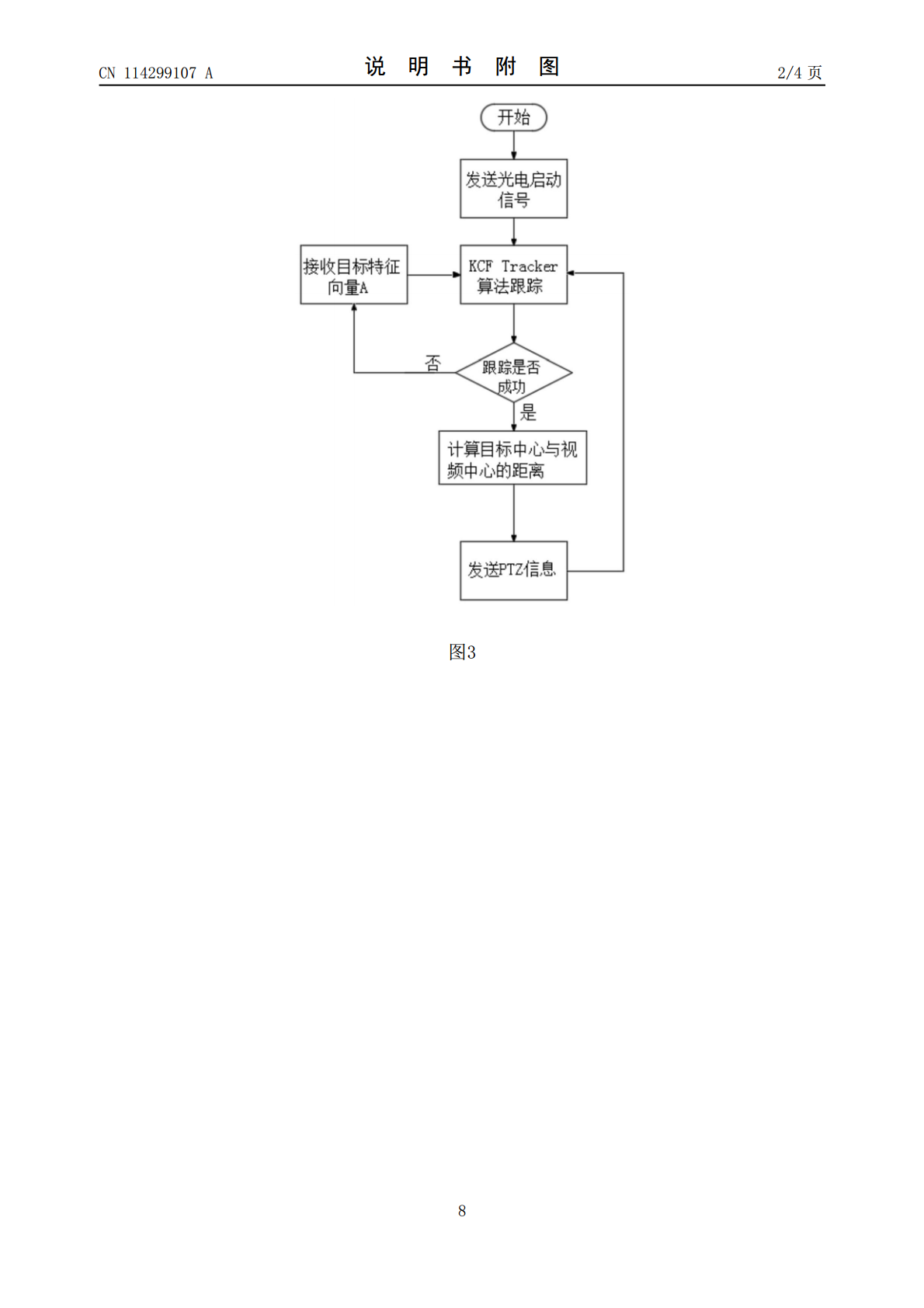
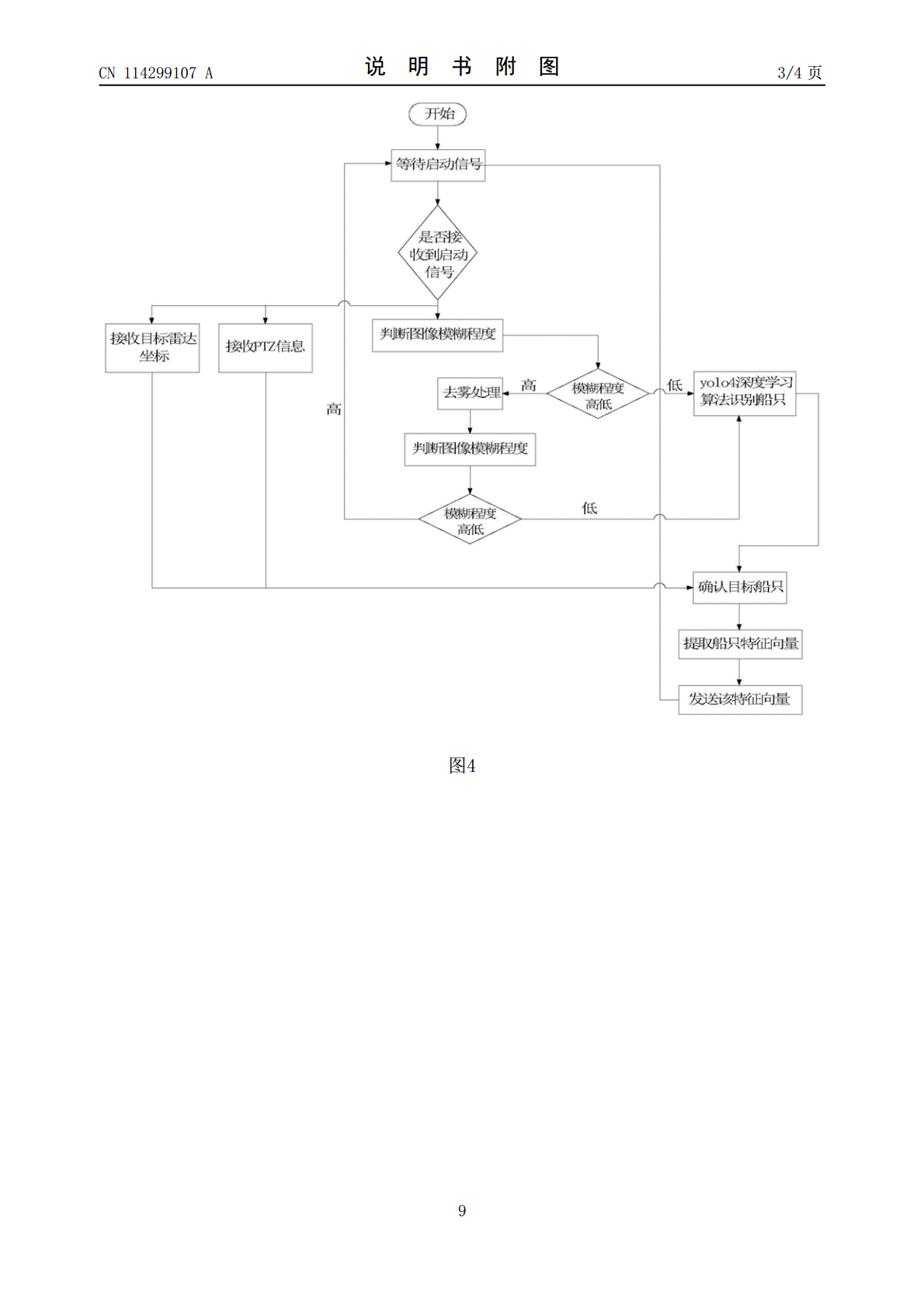
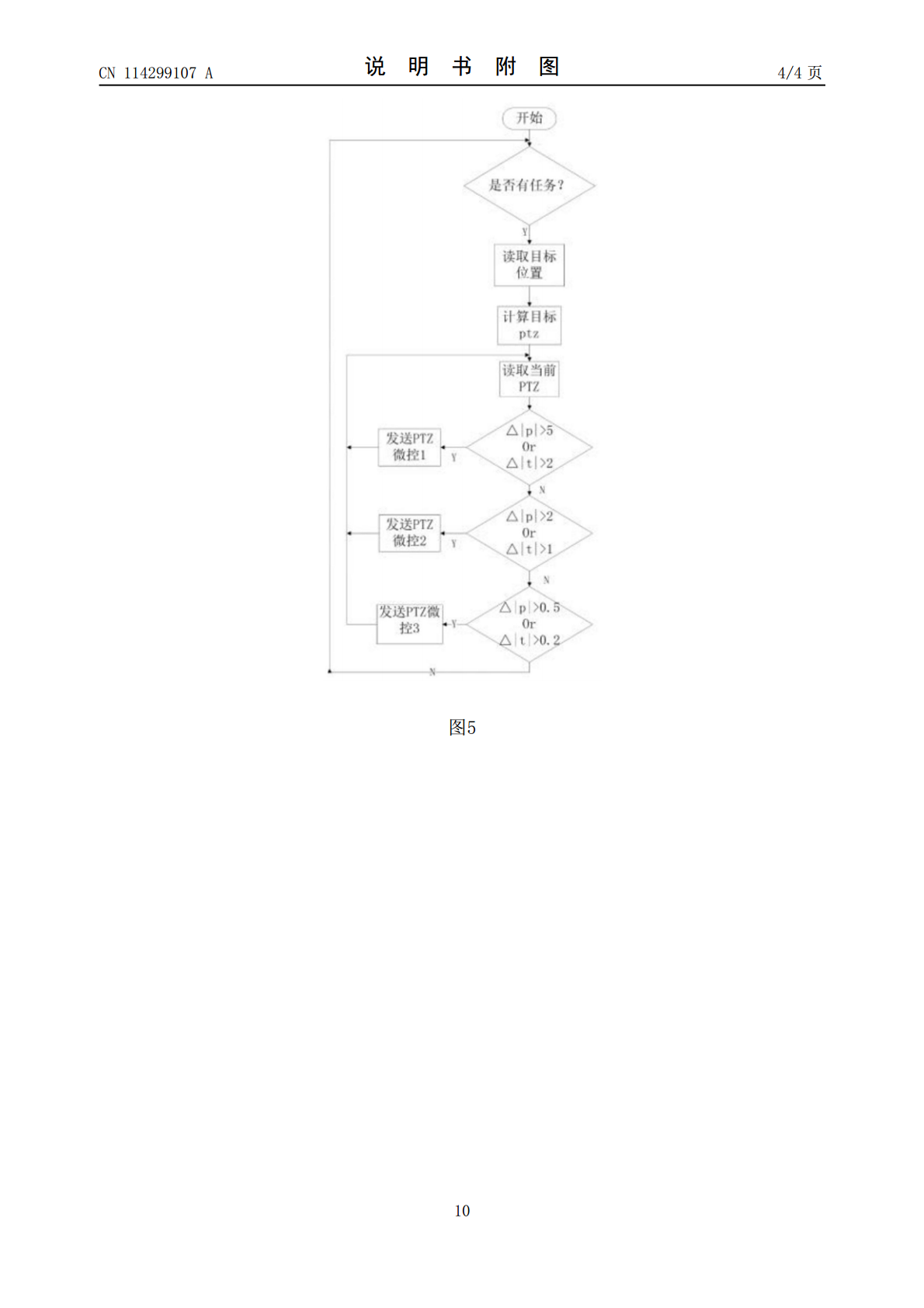
本发明公开了一种水域探测系统中多光电智能跟踪方法,将现有的智能跟踪方案拆分成两部分:一通过中心站智能船只识别设备识别船只并提取特征向量A发送给光电跟踪控制器,通过智能识别算力分配算法,让智能识别算力尽可能支持更多光电设备;二光电平滑跟踪控制器接收视频信号,通过船只智能识别算法获得移动目标特征向量并与A向量进行匹配,触发KCFTracker跟踪算法跟踪目标。通过两部分协同工作,减少光电设备长时间持续跟踪目标时产生的卡顿、延时,保证光电设备能够准确跟踪船只。
一种搜索和跟踪一体的光电探测系统.pdf
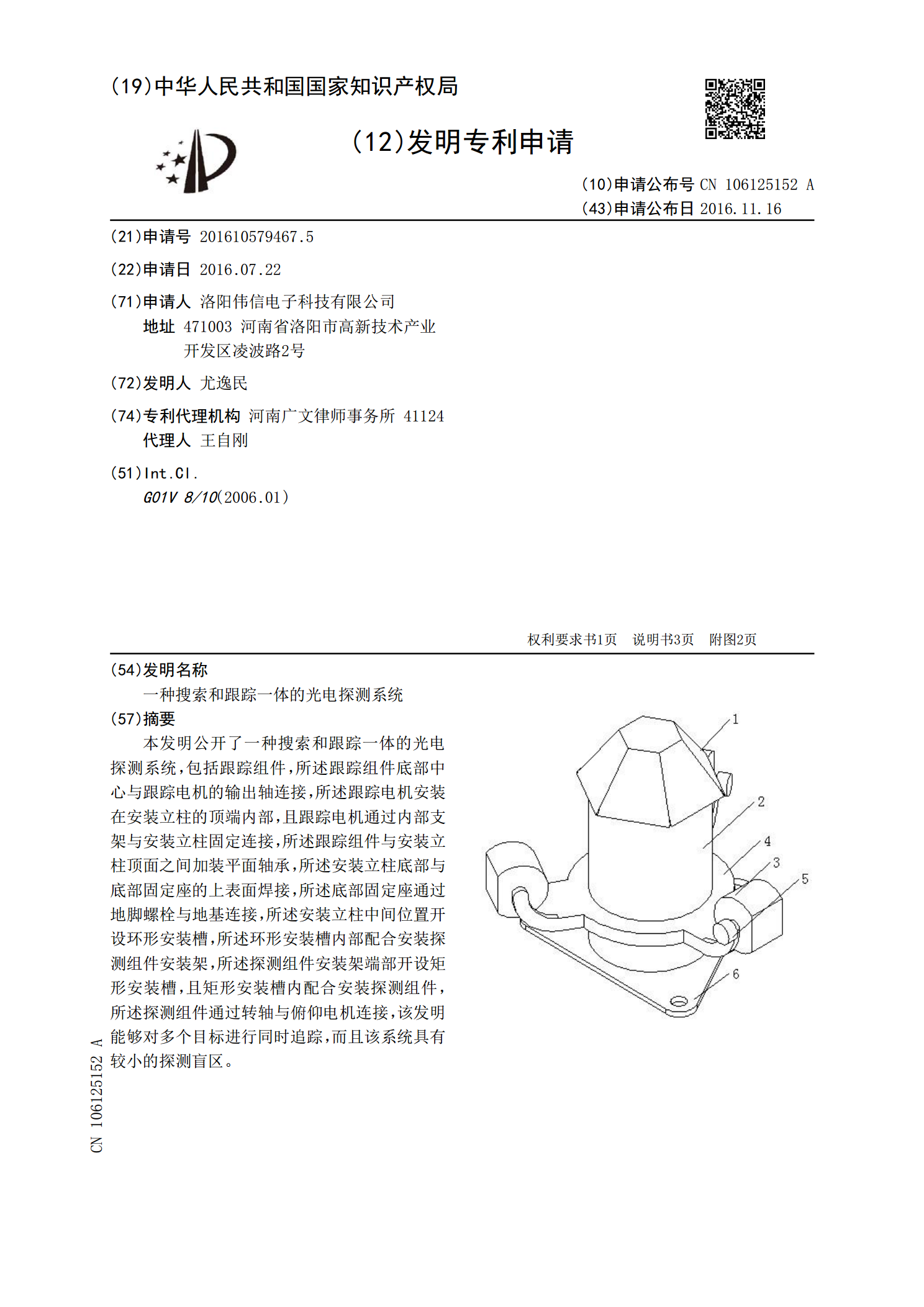
本发明公开了一种搜索和跟踪一体的光电探测系统,包括跟踪组件,所述跟踪组件底部中心与跟踪电机的输出轴连接,所述跟踪电机安装在安装立柱的顶端内部,且跟踪电机通过内部支架与安装立柱固定连接,所述跟踪组件与安装立柱顶面之间加装平面轴承,所述安装立柱底部与底部固定座的上表面焊接,所述底部固定座通过地脚螺栓与地基连接,所述安装立柱中间位置开设环形安装槽,所述环形安装槽内部配合安装探测组件安装架,所述探测组件安装架端部开设矩形安装槽,且矩形安装槽内配合安装探测组件,所述探测组件通过转轴与俯仰电机连接,该发明能够对多个目
一种反伪装智能光电跟踪瞄准镜.pdf
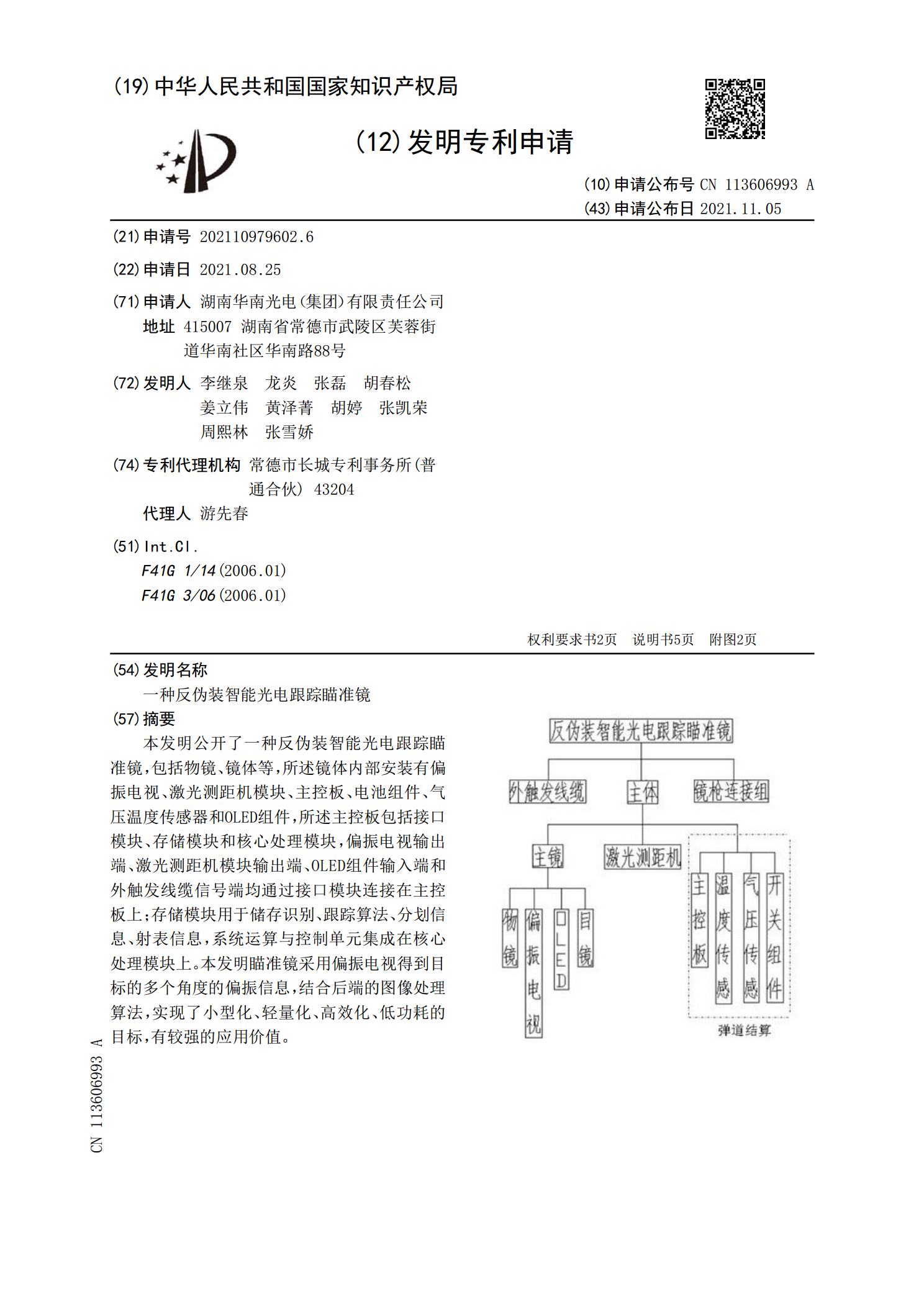
本发明公开了一种反伪装智能光电跟踪瞄准镜,包括物镜、镜体等,所述镜体内部安装有偏振电视、激光测距机模块、主控板、电池组件、气压温度传感器和OLED组件,所述主控板包括接口模块、存储模块和核心处理模块,偏振电视输出端、激光测距机模块输出端、OLED组件输入端和外触发线缆信号端均通过接口模块连接在主控板上;存储模块用于储存识别、跟踪算法、分划信息、射表信息,系统运算与控制单元集成在核心处理模块上。本发明瞄准镜采用偏振电视得到目标的多个角度的偏振信息,结合后端的图像处理算法,实现了小型化、轻量化、高效化、低功耗
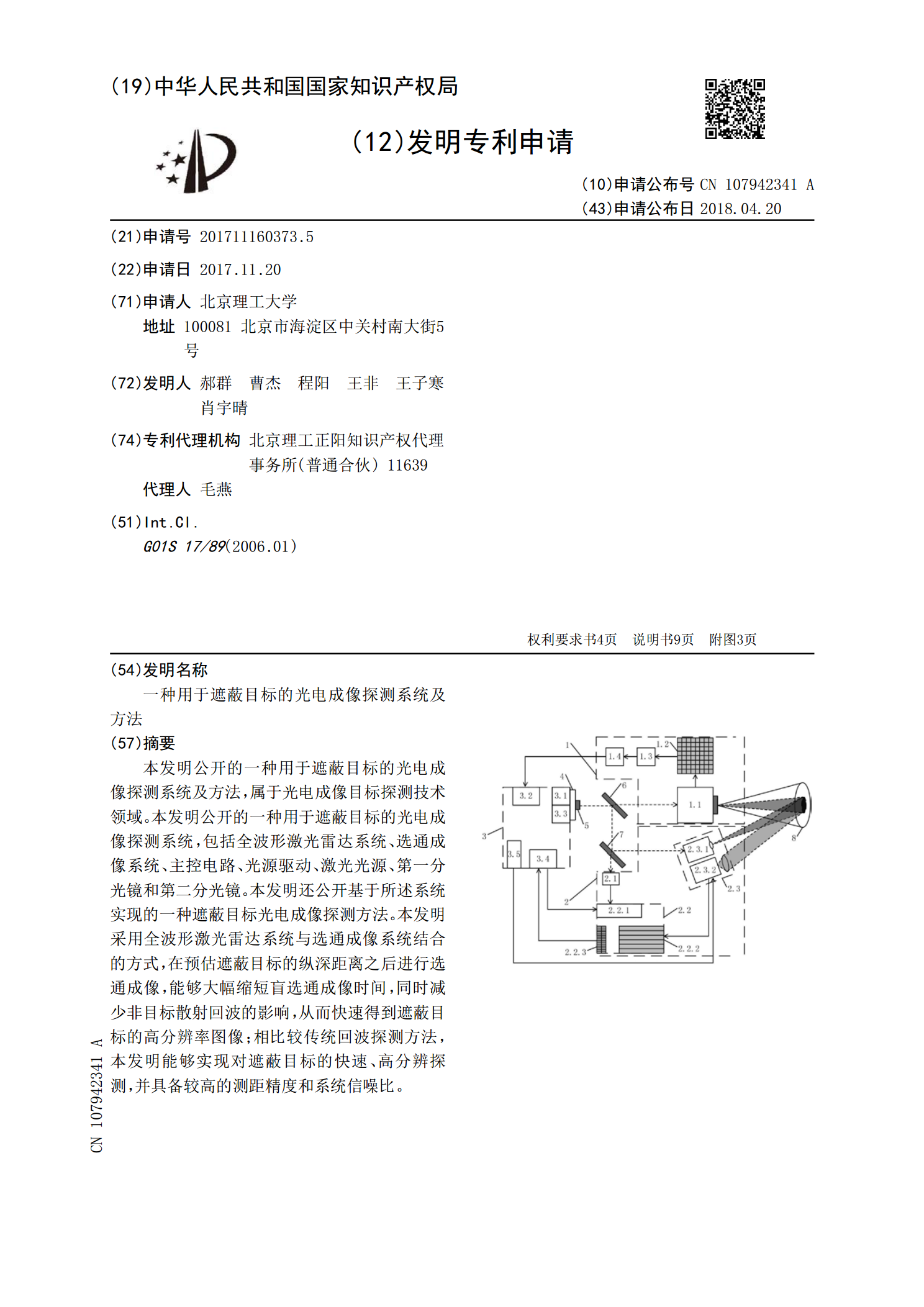
一种用于遮蔽目标的光电成像探测系统及方法.pdf
本发明公开的一种用于遮蔽目标的光电成像探测系统及方法,属于光电成像目标探测技术领域。本发明公开的一种用于遮蔽目标的光电成像探测系统,包括全波形激光雷达系统、选通成像系统、主控电路、光源驱动、激光光源、第一分光镜和第二分光镜。本发明还公开基于所述系统实现的一种遮蔽目标光电成像探测方法。本发明采用全波形激光雷达系统与选通成像系统结合的方式,在预估遮蔽目标的纵深距离之后进行选通成像,能够大幅缩短盲选通成像时间,同时减少非目标散射回波的影响,从而快速得到遮蔽目标的高分辨率图像;相比较传统回波探测方法,本发明能够实
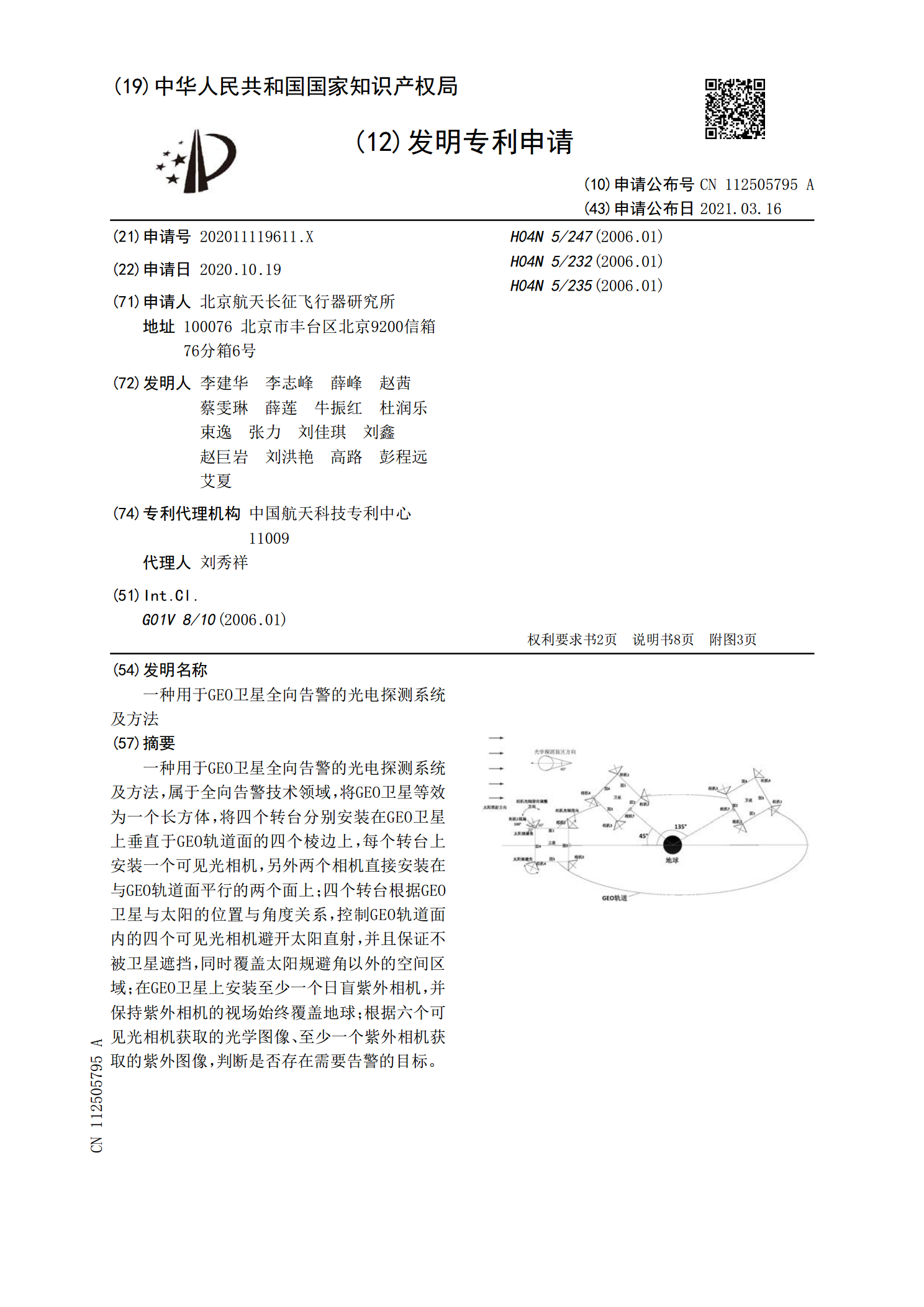
一种用于GEO卫星全向告警的光电探测系统及方法.pdf
一种用于GEO卫星全向告警的光电探测系统及方法,属于全向告警技术领域,将GEO卫星等效为一个长方体,将四个转台分别安装在GEO卫星上垂直于GEO轨道面的四个棱边上,每个转台上安装一个可见光相机,另外两个相机直接安装在与GEO轨道面平行的两个面上;四个转台根据GEO卫星与太阳的位置与角度关系,控制GEO轨道面内的四个可见光相机避开太阳直射,并且保证不被卫星遮挡,同时覆盖太阳规避角以外的空间区域;在GEO卫星上安装至少一个日盲紫外相机,并保持紫外相机的视场始终覆盖地球;根据六个可见光相机获取的光学图像、至少一