
交通状态监测方法、装置、计算机设备和可读存储介质.pdf

明钰****甜甜


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

交通状态监测方法、装置、计算机设备和可读存储介质.pdf
本申请涉及一种交通状态监测方法、装置、计算机设备和可读存储介质。所述方法包括:获取目标路段在观测时长内的采样所得车辆GPS数据;根据所述车辆GPS数据计算所述观测时长内各采样周期的交通流离散度;确定所述观测时长内的所述交通流离散度处于预设范围的第一比率;若所述第一比率大于比率阈值,则确定在所述观测时长内所述目标路段的交通状态为拥堵状态。采用本方法能够提高交通状态监测的准确性。

睡眠状态监测方法、装置、设备和计算机可读存储介质.pdf
本申请公开了一种睡眠状态监测方法、装置、设备和计算机可读存储介质,涉及人工智能领域。具体实现方案为:监测用户在第一预设时间段内的第一睡眠信息;根据第一睡眠信息,预测用户在闹钟触发时刻的第一睡眠状态;在第一睡眠状态为深睡眠状态的情况下,播放第一调节声音。上述技术方案通过在闹钟触发之前预测用户在闹钟触发时的睡眠状态,并在预测到用户处于深睡眠状态的情况下,播放第一调节声音,可以降低用户被闹钟唤醒时的不舒服感,优化用户体验。

运动状态的监测方法、装置、设备、可读存储介质.pdf
本申请提供一种运动状态的监测方法、装置、设备、可读存储介质。运动状态的监测方法,包括:获取监测传感器的状态变化数据;所述监测传感器设置在待监测啮齿动物的饲养装置的预设位置处;根据所述状态变化数据生成所述待监测啮齿动物的运动状态变化数据;其中,所述监测传感器的状态变化一次,代表所述待监测啮齿动物运动一次。该方法提高运动状态监测的适用性。
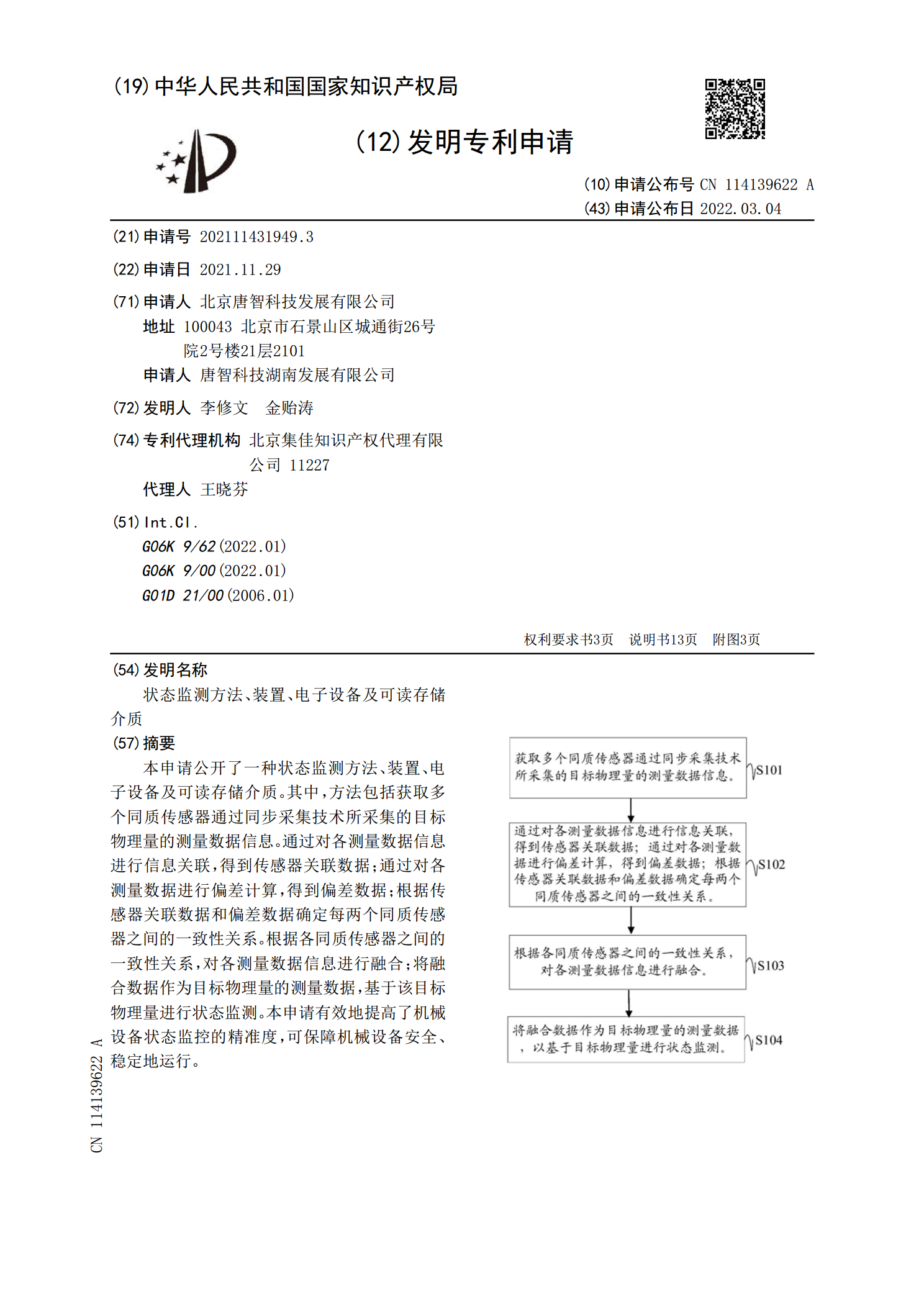
状态监测方法、装置、电子设备及可读存储介质.pdf
本申请公开了一种状态监测方法、装置、电子设备及可读存储介质。其中,方法包括获取多个同质传感器通过同步采集技术所采集的目标物理量的测量数据信息。通过对各测量数据信息进行信息关联,得到传感器关联数据;通过对各测量数据进行偏差计算,得到偏差数据;根据传感器关联数据和偏差数据确定每两个同质传感器之间的一致性关系。根据各同质传感器之间的一致性关系,对各测量数据信息进行融合;将融合数据作为目标物理量的测量数据,基于该目标物理量进行状态监测。本申请有效地提高了机械设备状态监控的精准度,可保障机械设备安全、稳定地运行。
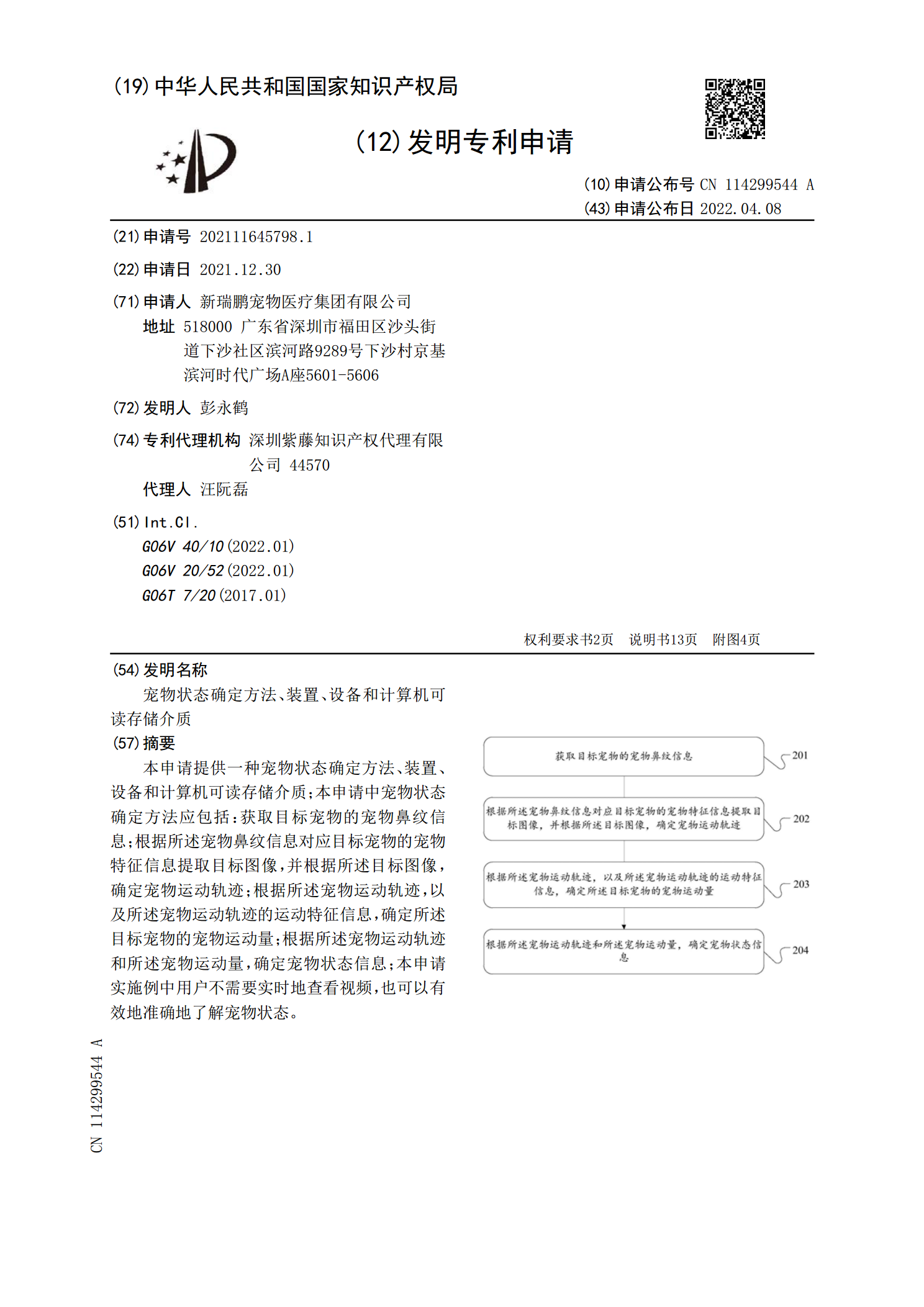
宠物状态确定方法、装置、设备和计算机可读存储介质.pdf
本申请提供一种宠物状态确定方法、装置、设备和计算机可读存储介质;本申请中宠物状态确定方法应包括:获取目标宠物的宠物鼻纹信息;根据所述宠物鼻纹信息对应目标宠物的宠物特征信息提取目标图像,并根据所述目标图像,确定宠物运动轨迹;根据所述宠物运动轨迹,以及所述宠物运动轨迹的运动特征信息,确定所述目标宠物的宠物运动量;根据所述宠物运动轨迹和所述宠物运动量,确定宠物状态信息;本申请实施例中用户不需要实时地查看视频,也可以有效地准确地了解宠物状态。