
基于双目视觉绘制地标地图的装置、系统及方法.pdf

努力****元恺

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目视觉绘制地标地图的装置、系统及方法.pdf
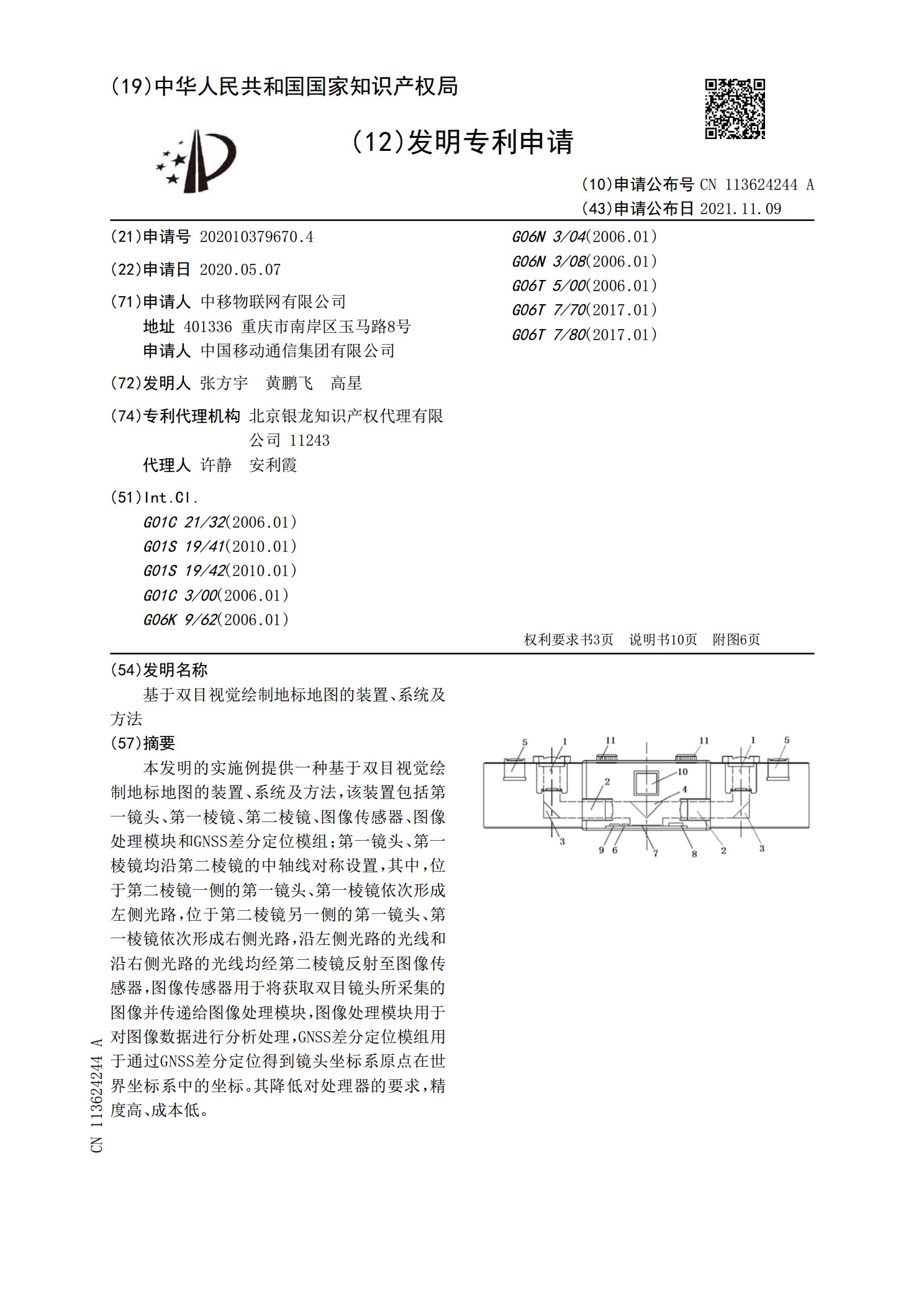
本发明的实施例提供一种基于双目视觉绘制地标地图的装置、系统及方法,该装置包括第一镜头、第一棱镜、第二棱镜、图像传感器、图像处理模块和GNSS差分定位模组;第一镜头、第一棱镜均沿第二棱镜的中轴线对称设置,其中,位于第二棱镜一侧的第一镜头、第一棱镜依次形成左侧光路,位于第二棱镜另一侧的第一镜头、第一棱镜依次形成右侧光路,沿左侧光路的光线和沿右侧光路的光线均经第二棱镜反射至图像传感器,图像传感器用于将获取双目镜头所采集的图像并传递给图像处理模块,图像处理模块用于对图像数据进行分析处理,GNSS差分定位模组用于通

一种基于双目立体视觉的体绘制方法.docx
一种基于双目立体视觉的体绘制方法摘要双目立体视觉是一种利用两个成像系统同时加工视觉信息来获取三维信息的技术。基于双目立体视觉的体绘制方法可以在医学、工程、设计领域等方面广泛应用。本文介绍了基于双目立体视觉的体绘制的原理、技术细节和应用场景,并通过实验验证了该方法的有效性。关键词:双目立体视觉,体绘制,原理,技术细节,应用场景,实验验证。引言在医学上,3D医学影像是一种用于帮助医生诊断和治疗疾病的新技术。然而,传统的医学影像只能提供二维图像,无法直观地显示人体各个方位的结构和内部情况。因此,开发一种高效、直
基于双目视觉系统的果实定位方法和装置.pdf
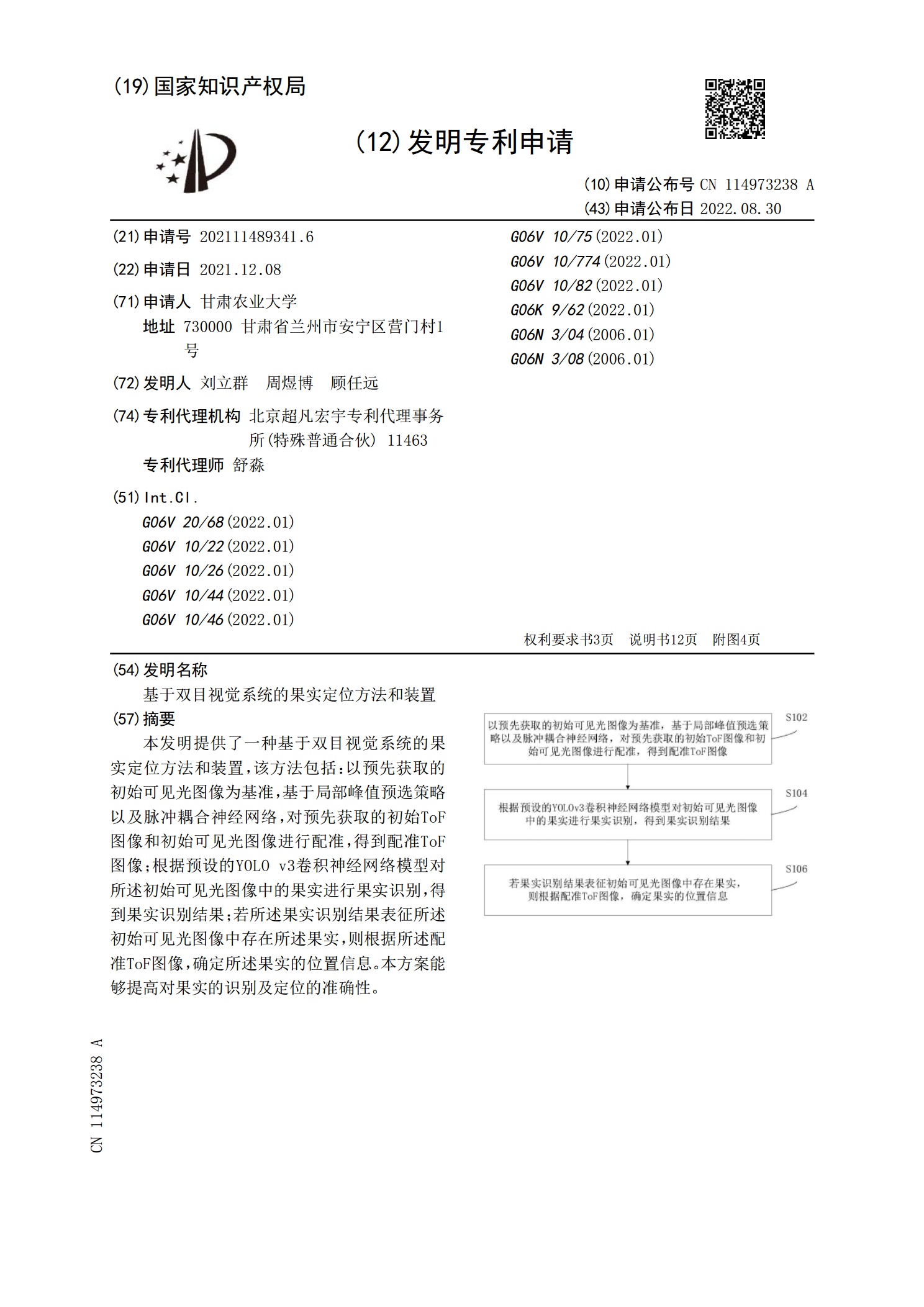
本发明提供了一种基于双目视觉系统的果实定位方法和装置,该方法包括:以预先获取的初始可见光图像为基准,基于局部峰值预选策略以及脉冲耦合神经网络,对预先获取的初始ToF图像和初始可见光图像进行配准,得到配准ToF图像;根据预设的YOLOv3卷积神经网络模型对所述初始可见光图像中的果实进行果实识别,得到果实识别结果;若所述果实识别结果表征所述初始可见光图像中存在所述果实,则根据所述配准ToF图像,确定所述果实的位置信息。本方案能够提高对果实的识别及定位的准确性。

一种基于全景双目视觉的稠密三维地图重建方法及系统.pdf
本发明涉及一种基于全景双目视觉的稠密三维地图重建方法及系统,其方法包括:S1、利用相对分布的两个全景相机同步采集数对棋盘格图像;S2、利用数对棋盘格图像对全景相机进行标定,得到内参以及每个棋盘格相对于两个全景相机的外参矩阵;标定两个全景相机的相机坐标系间的变换矩阵;利用相机坐标系间的变换矩阵,将两个全景相机的相机坐标系对齐标定至系统坐标系下;S3、将三维单位向量球面按照经纬度等矩形展开,得到两幅在经度方向对齐、纬度方向存在视差的全景展开图;S4、基于两幅全景展开图,计算得到稠密视差图像;S5、计算每个空间

一种基于双目视觉的定位方法及装置.pdf
本发明公开了一种基于双目视觉的定位方法及装置,应用于电力巡检机器人,方法包括以下步骤:分别采集场景的可见光图像和红外图像;分别对可见光图像和红外图像进行轮廓特征提取,获取第一轮廓特征和第二轮廓特征;分别对第一轮廓特征和第二轮廓特征进行SIFT特征提取,获取可见光图像SIFT特征点和红外图像SIFT特征点;将可见光图像SIFT特征点和红外图像SIFT特征点进行匹配,校准可见光图像SIFT特征点和红外图像SIFT特征点位置,将可见光图像和红外图像进行融合,得到融合后的融合图像;通过将所述融合图像进行模板匹配,