
一种磁悬浮称重系统及其控制方法.pdf

长春****主a

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种磁悬浮称重系统及其控制方法.pdf
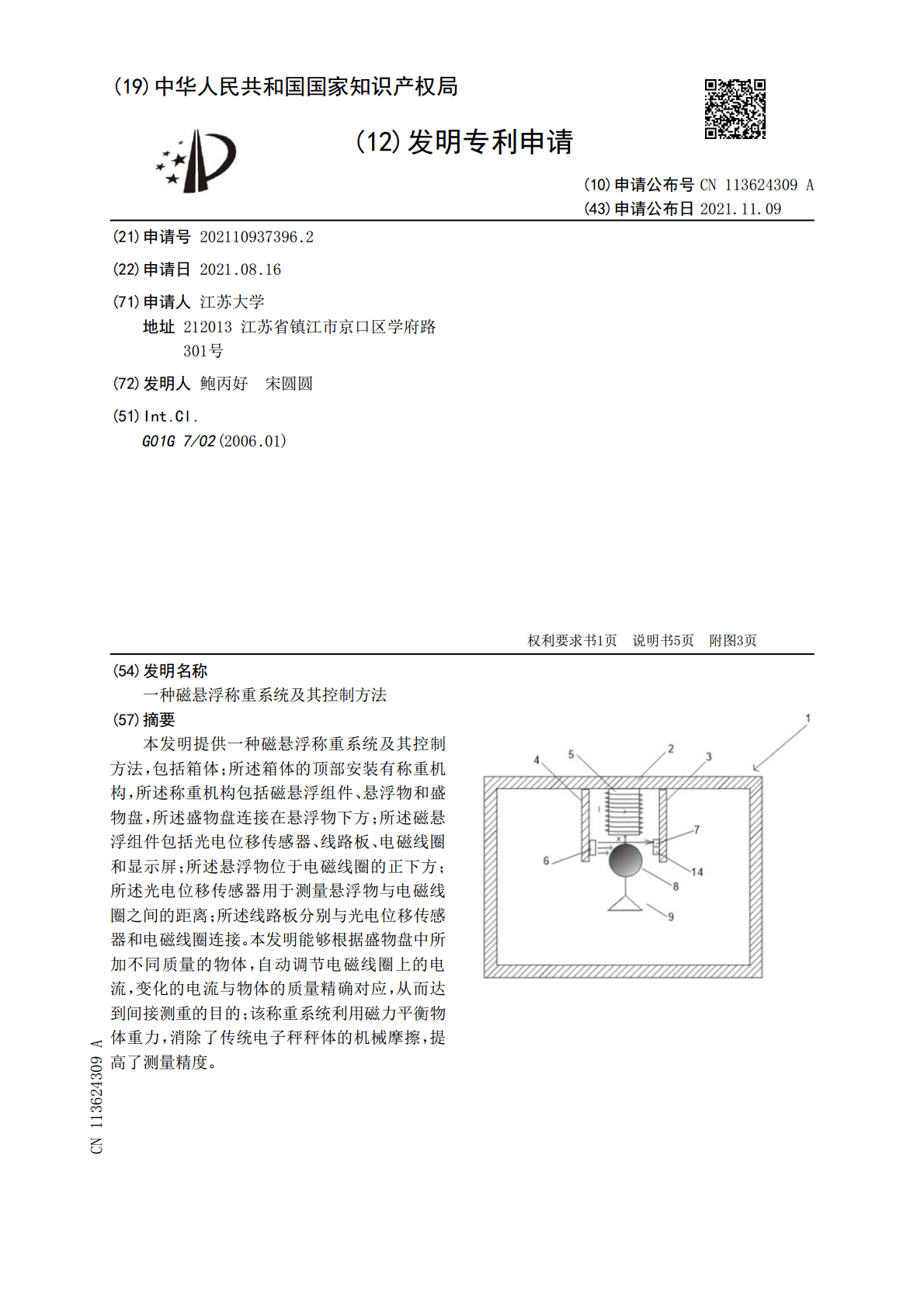
本发明提供一种磁悬浮称重系统及其控制方法,包括箱体;所述箱体的顶部安装有称重机构,所述称重机构包括磁悬浮组件、悬浮物和盛物盘,所述盛物盘连接在悬浮物下方;所述磁悬浮组件包括光电位移传感器、线路板、电磁线圈和显示屏;所述悬浮物位于电磁线圈的正下方;所述光电位移传感器用于测量悬浮物与电磁线圈之间的距离;所述线路板分别与光电位移传感器和电磁线圈连接。本发明能够根据盛物盘中所加不同质量的物体,自动调节电磁线圈上的电流,变化的电流与物体的质量精确对应,从而达到间接测重的目的;该称重系统利用磁力平衡物体重力,消除了传

小车称重系统及其控制方法.pdf
本发明提出一种小车称重系统,包括小车,小车可沿其移动的轨道,设置在轨道上的接料位置传感器、卸料位置传感器、小车驱动装置,以及控制系统,小车具有若干与轨道配合的滚轮,轨道包括两条并行的滑轨,控制系统与接料位置传感器、卸料位置传感器、小车驱动装置信号连通,小车称重系统还包括设置在各滑轨上的若干称重单元,称重单元的感测面设置在滑轨的承载面上,若干称重单元的位置与小车的若干滚轮的位置对应,控制系统与称重单元信号连通,并且控制系统根据若干称重单元测量到的小车卸料前、后的重量,计算出小车卸料的重量。采用这种小车称重系
一种超导磁悬浮减震系统及其控制方法.pdf
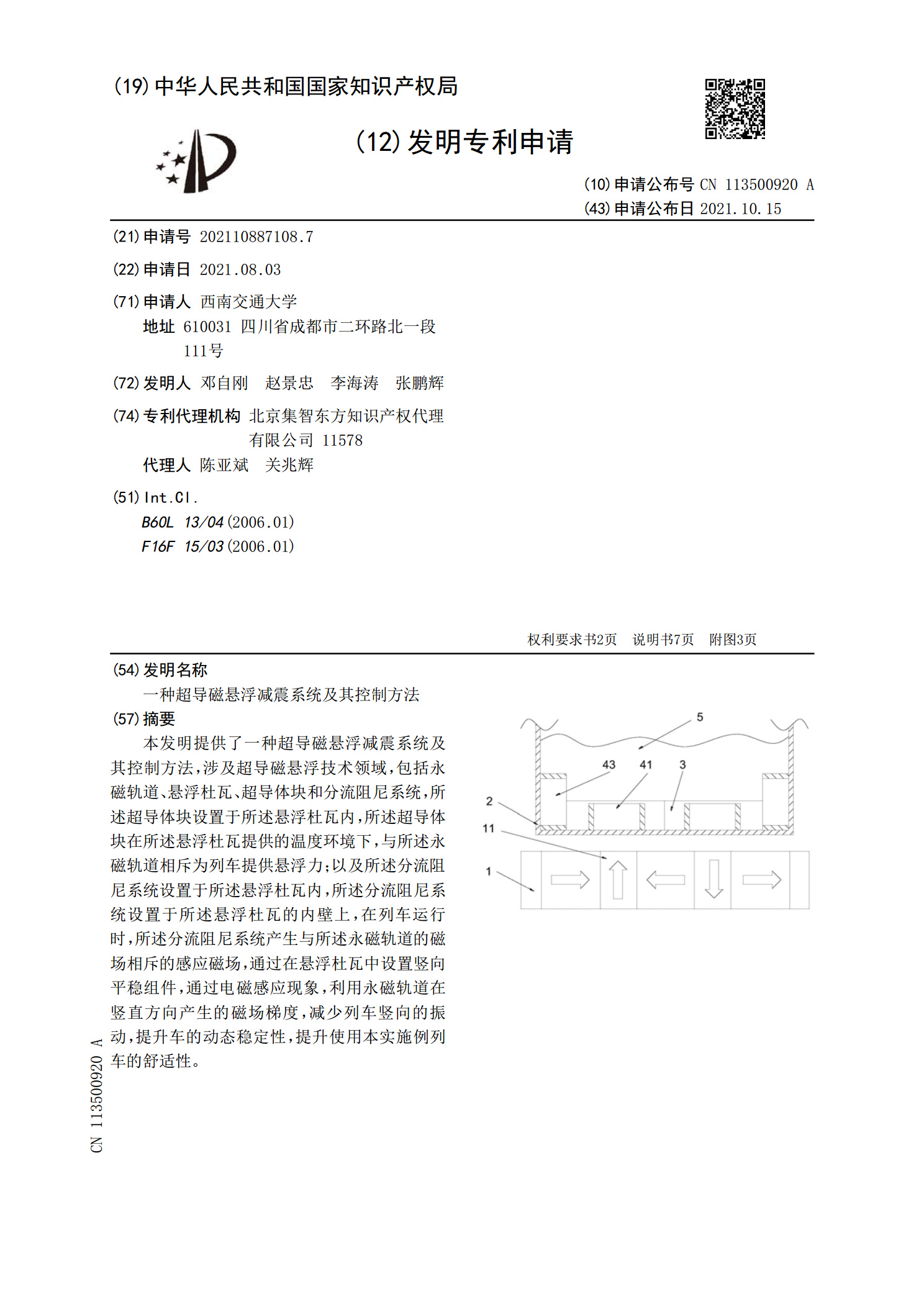
本发明提供了一种超导磁悬浮减震系统及其控制方法,涉及超导磁悬浮技术领域,包括永磁轨道、悬浮杜瓦、超导体块和分流阻尼系统,所述超导体块设置于所述悬浮杜瓦内,所述超导体块在所述悬浮杜瓦提供的温度环境下,与所述永磁轨道相斥为列车提供悬浮力;以及所述分流阻尼系统设置于所述悬浮杜瓦内,所述分流阻尼系统设置于所述悬浮杜瓦的内壁上,在列车运行时,所述分流阻尼系统产生与所述永磁轨道的磁场相斥的感应磁场,通过在悬浮杜瓦中设置竖向平稳组件,通过电磁感应现象,利用永磁轨道在竖直方向产生的磁场梯度,减少列车竖向的振动,提升车的动

一种车载称重系统及其方法.pdf
本发明涉及一种车载称重系统及其方法。系统包括车轴、设置在车轴的应力传感器以及称重仪,应力传感器与称重仪信号连接,应力传感器用于感应车轴在负重下发生的应变,并将该应变信号转成电信号传递给称重仪,称重仪根据该应变信号计算出车轴的负重。方法包括:1、车辆空载,车轮保持在同一水平面上,且位于轮重台上;2、车轴上安装应力传感器;3、记录空载时应力传感器的应力信号;4、逐步增加负载,记录轮重台显示的重量变化以及应力信号变化,计算车轴的重量应力系数;5、根据每根车轴的重量应力系数以及应力信号计算出整个车辆的总负重;本发

一种自动拍照记录称重系统及其控制方法.pdf
本发明提供一种自动拍照记录称重系统及其控制方法,属于地磅称重设备技术领域,该自动拍照记录称重系统及其控制方法PC控制端模块、进站模块、地磅装置、出站模块、进站摄像头、第一摄像头、第二摄像头、第三摄像头、第四摄像头和出站摄像头,PC控制端模块与进站模块、地磅装置、出站模块、进站摄像头、第一摄像头、第二摄像头、第三摄像头、第四摄像头和出站摄像头之间均信号连接;本系统使得地磅装置在进行车辆称量时能够对车辆实时信息进行拍照留存,使得工作人员记录信息更便捷,同时分区域存储文件夹,便于后期的调取查看,同时使得车辆称重