
基于MRF的实孔径扫描雷达超分辨成像方法.pdf

景山****魔王


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于MRF的实孔径扫描雷达超分辨成像方法.pdf
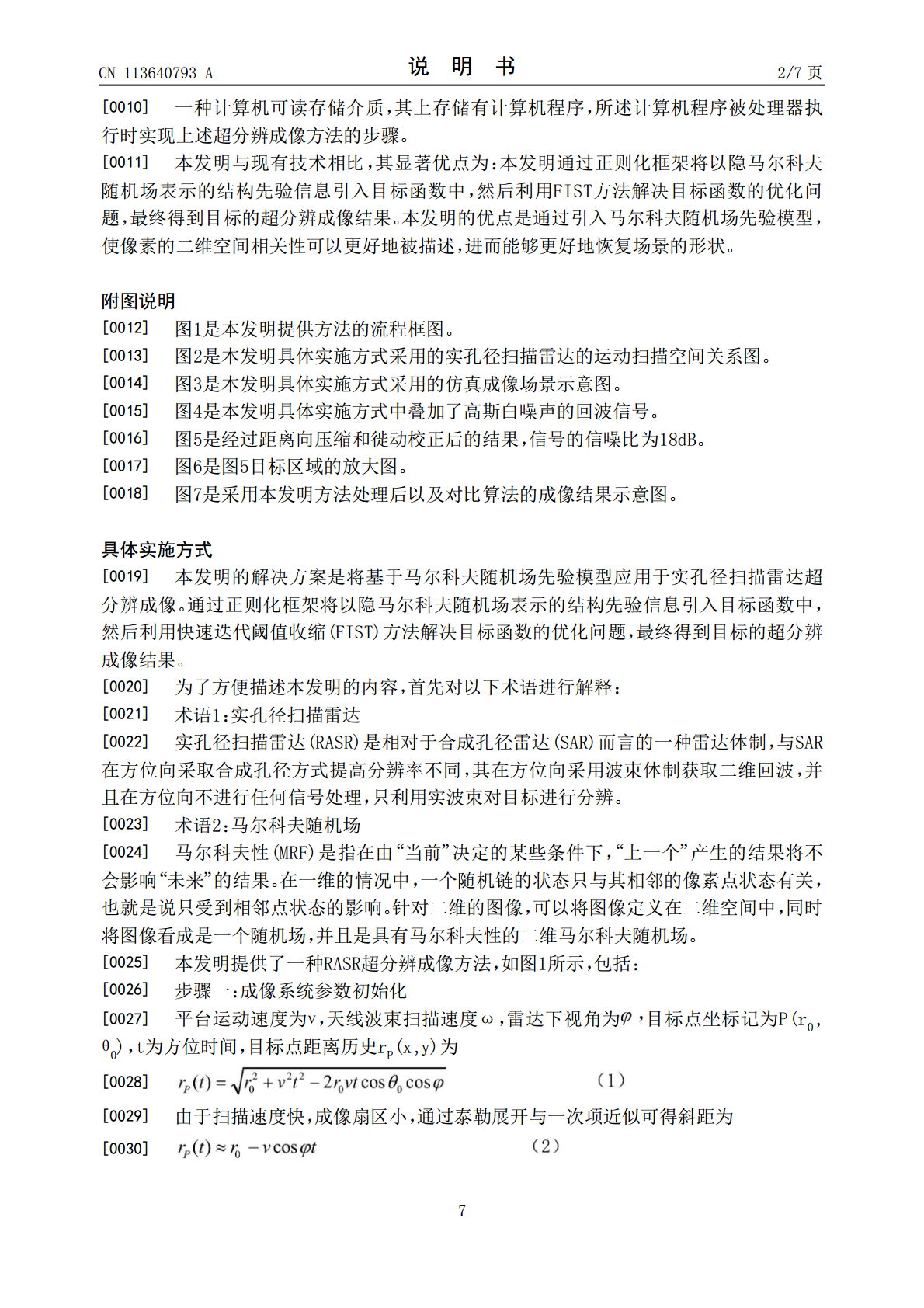
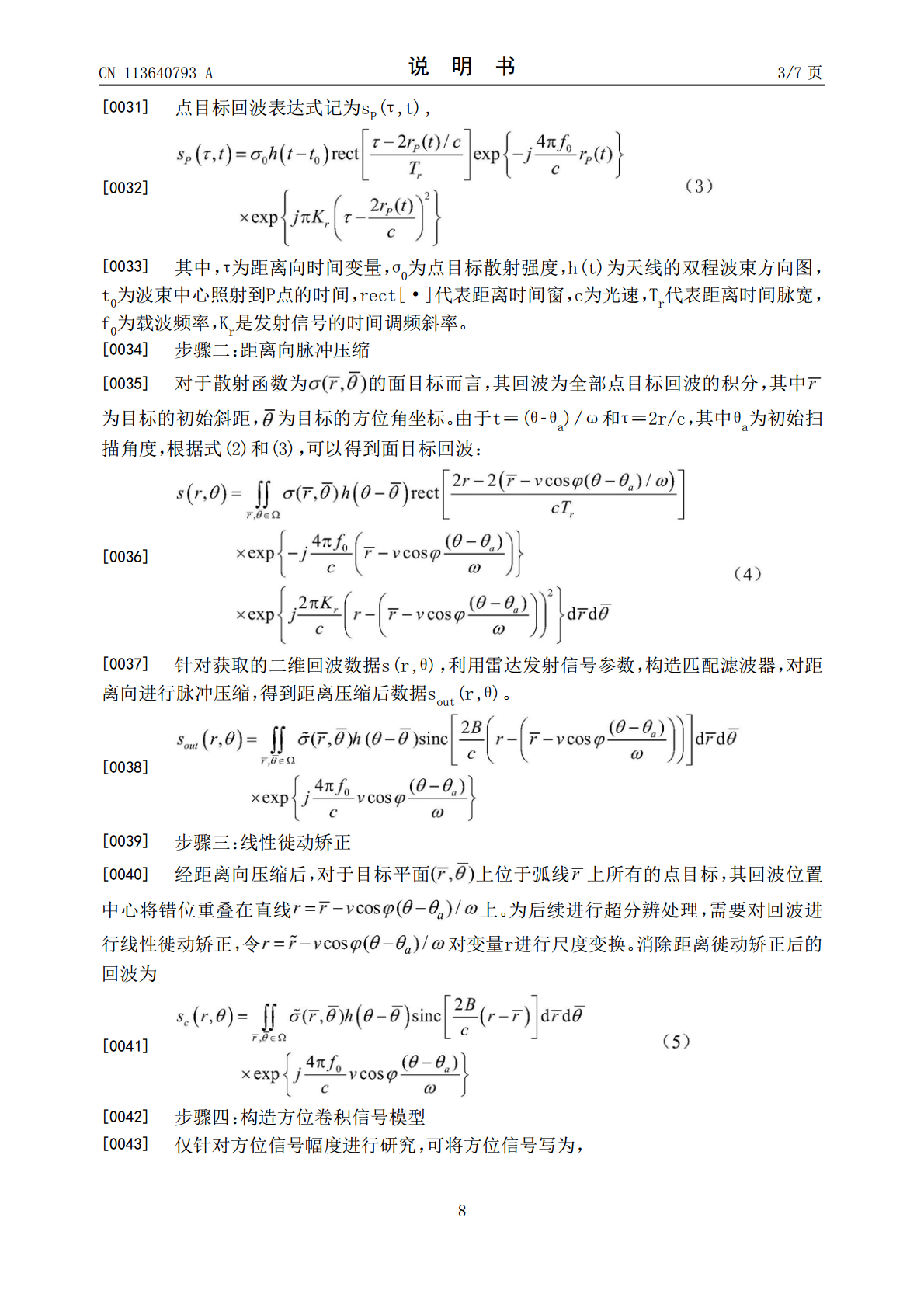
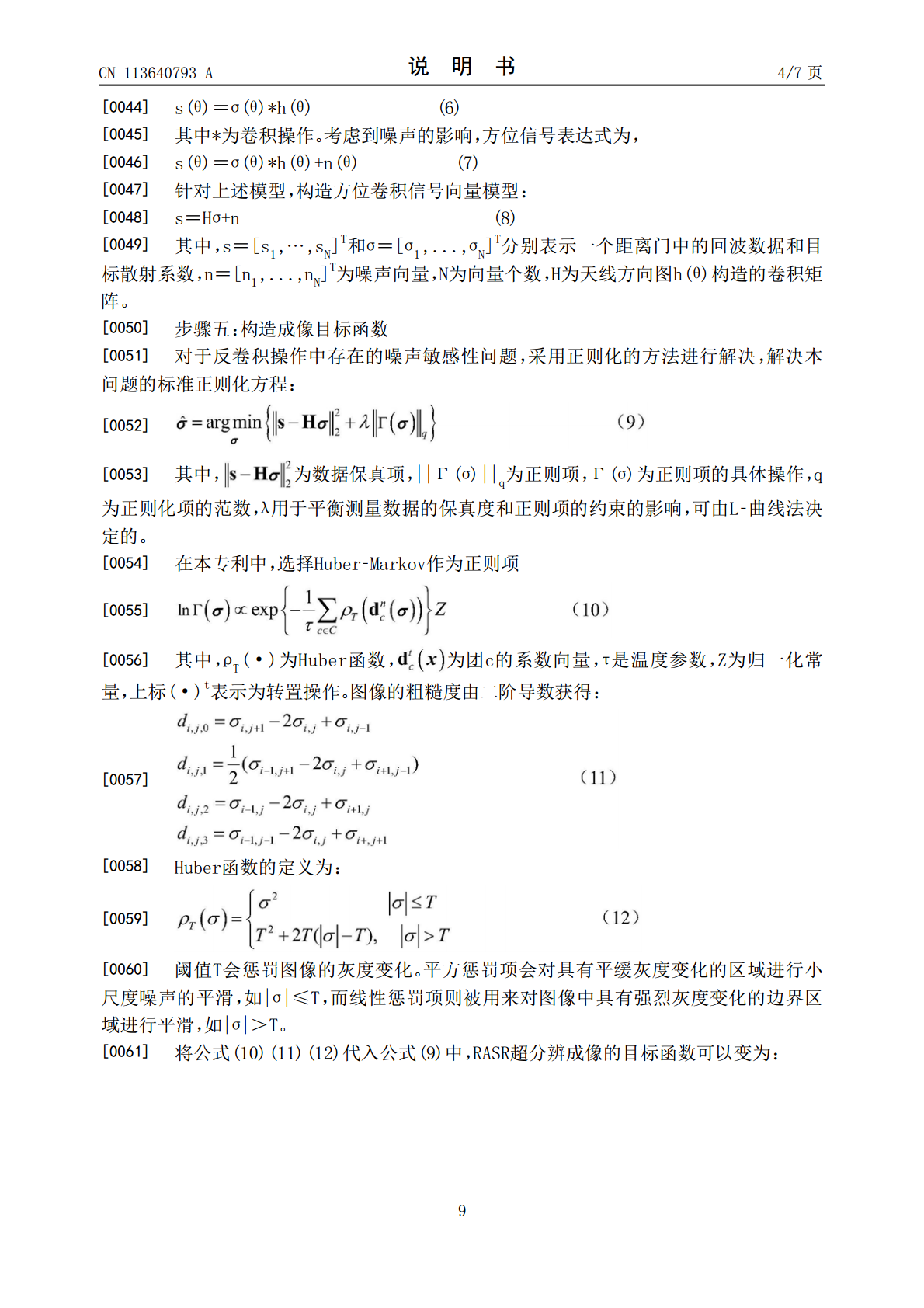
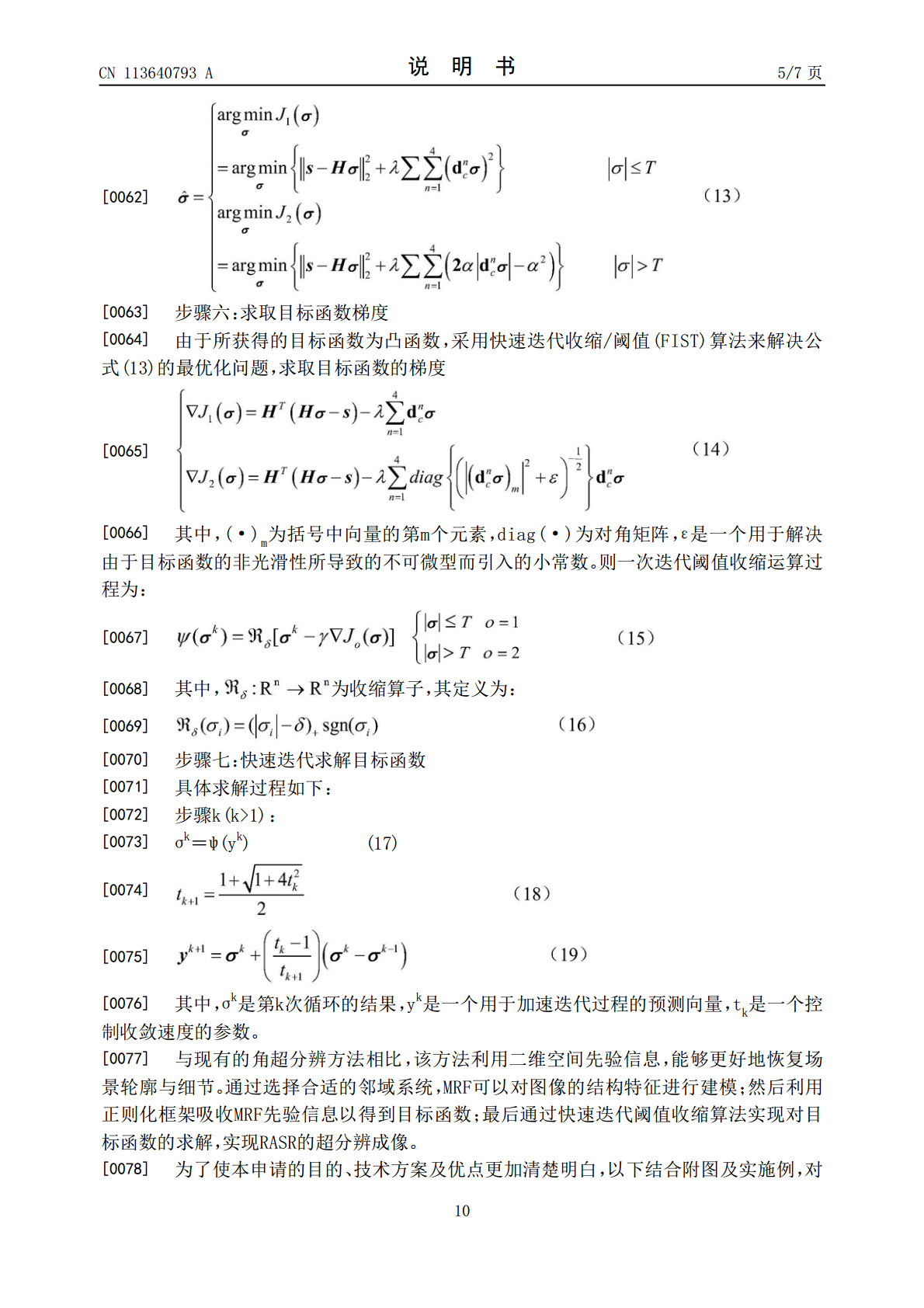
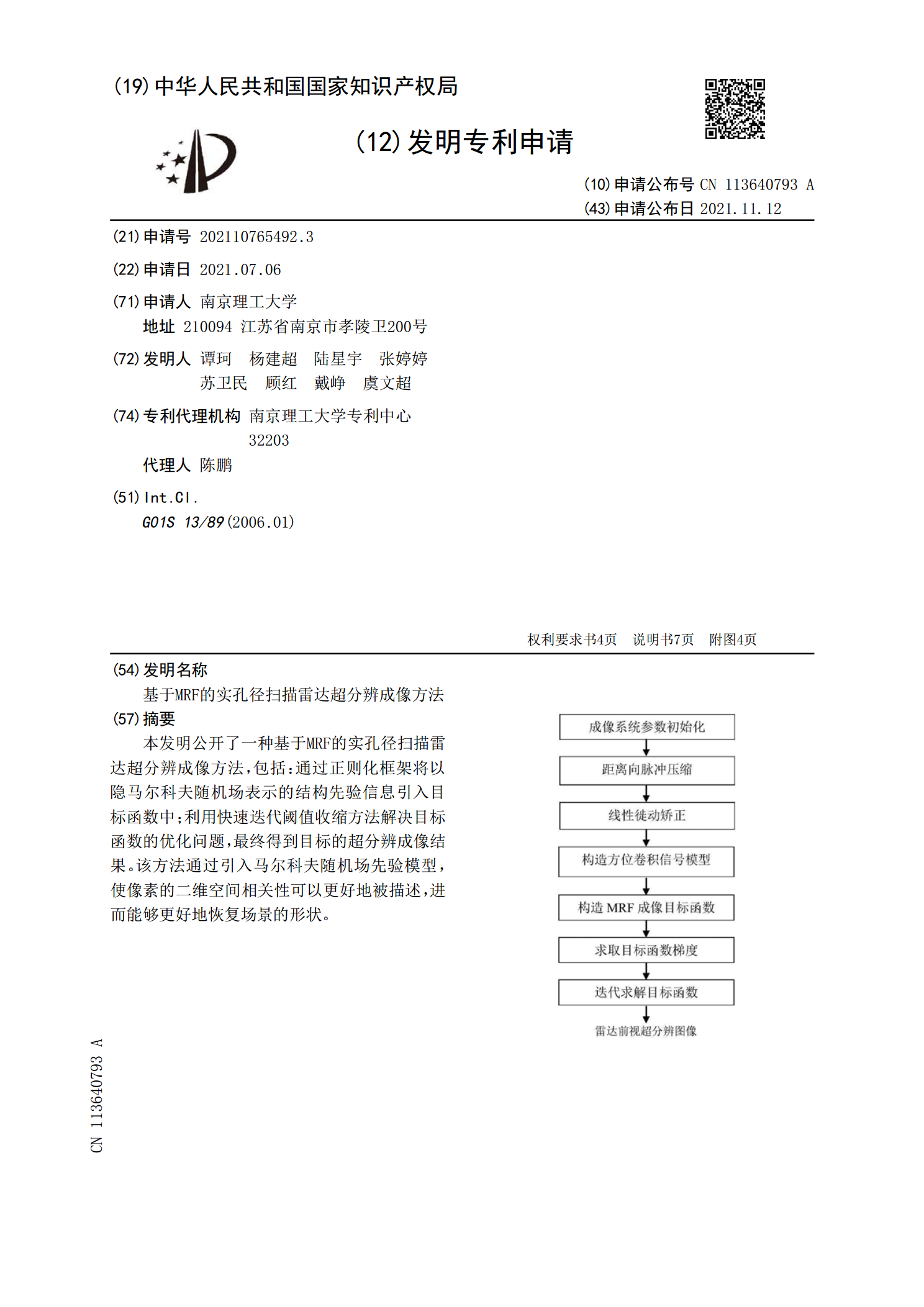
本发明公开了一种基于MRF的实孔径扫描雷达超分辨成像方法,包括:通过正则化框架将以隐马尔科夫随机场表示的结构先验信息引入目标函数中;利用快速迭代阈值收缩方法解决目标函数的优化问题,最终得到目标的超分辨成像结果。该方法通过引入马尔科夫随机场先验模型,使像素的二维空间相关性可以更好地被描述,进而能够更好地恢复场景的形状。
一种基于改进正则化的实孔径扫描雷达超分辨成像方法.pdf
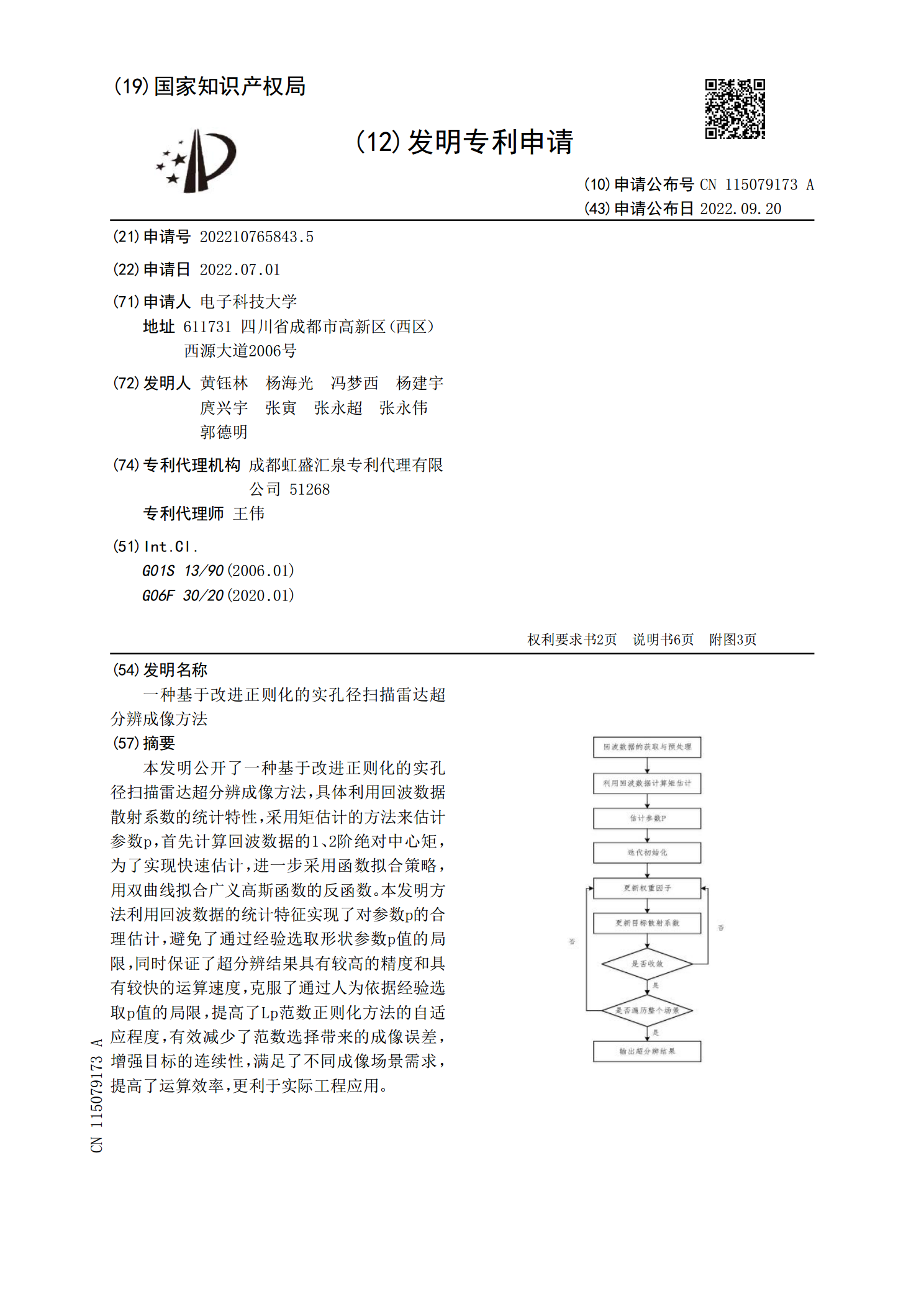
本发明公开了一种基于改进正则化的实孔径扫描雷达超分辨成像方法,具体利用回波数据散射系数的统计特性,采用矩估计的方法来估计参数p,首先计算回波数据的1、2阶绝对中心矩,为了实现快速估计,进一步采用函数拟合策略,用双曲线拟合广义高斯函数的反函数。本发明方法利用回波数据的统计特征实现了对参数p的合理估计,避免了通过经验选取形状参数p值的局限,同时保证了超分辨结果具有较高的精度和具有较快的运算速度,克服了通过人为依据经验选取p值的局限,提高了Lp范数正则化方法的自适应程度,有效减少了范数选择带来的成像误差,增强目
一种基于改进正则化的实孔径扫描雷达超分辨成像方法.pdf
本发明公开了一种基于改进正则化的实孔径扫描雷达超分辨成像方法,具体利用回波数据散射系数的统计特性,采用矩估计的方法来估计参数p,首先计算回波数据的1、2阶绝对中心矩,为了实现快速估计,进一步采用函数拟合策略,用双曲线拟合广义高斯函数的反函数。本发明方法利用回波数据的统计特征实现了对参数p的合理估计,避免了通过经验选取形状参数p值的局限,同时保证了超分辨结果具有较高的精度和具有较快的运算速度,克服了通过人为依据经验选取p值的局限,提高了Lp范数正则化方法的自适应程度,有效减少了范数选择带来的成像误差,增强目

实孔径相控阵雷达高分辨探测成像方法.pdf
本发明公开了一种实孔径相控阵雷达高分辨探测成像方法,主要解决传统相控阵雷达成像系统角度分辨率较低,无法实现对目标区域的高分辨成像的问题。其实现步骤是:(1)根据相控阵雷达工作方式获取回波信号;(2)由回波信号的理想形式构造观测矩阵;(3)根据回波信号与观测矩阵的关系,建立相控阵雷达成像模型;(4)根据目标场景轮廓稀疏的先验信息,利用正则化的方法将雷达成像模型转化为优化模型;(5)将有约束的优化模型转化为无约束的优化表达式,并利用交替方向迭代法进行求解得到最终成像结果。本发明能在减少探测成像次数和探测数据的

一种实波束扫描雷达加速超分辨成像方法.pdf
本发明提供了一种实波束扫描雷达加速超分辨成像方法,属于雷达成像技术领域。本发明针对迭代阈值收缩算法收敛速度较慢的问题,结合泰勒展开原理,在每次迭代操作之前,由历史迭代向量及其前两阶差分信息构造预测向量,减少了迭代次数,提高了算法收敛速度,缩短了超分辨成像所需的时间,达到加速的目的。