
一种具备自适应柔性的气动仿生三指机械手.pdf

St****36


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种具备自适应柔性的气动仿生三指机械手.pdf
本发明公开了一种具备自适应柔性的气动仿生三指机械手,包括仿生柔性机械手,手部收缩气缸、气泵驱动装置、连接板、固定底座。本发明的仿生柔性机械手表面使用高弹性结构,接触表面采用凸起条纹设计,增加手指表面接触摩擦力,抓取目标时不易脱落,而且由于高弹性材料仿生结构自身的材料属性,使得仿生手指在抓取易碎物体时具有良好的安全性。本发明使用气缸来代替电机,使得成下降,响应速度加快,同时操作便宜,控制简单。本发明实用性高,由于手指采用柔性仿生材料,可以针对不规则、多规格、多形状物体进行自适应柔性抓取,稳定性高,易于控制。

一种柔性仿生机械手.pdf
本发明公开了一种柔性仿生机械手,涉及机械装置技术领域,包括机械手臂、机械手腕和机械手指:机械手臂,包括手臂支架,转轴连接螺杆的电机一、电机二,螺杆上通过螺纹配合安装有螺母;机械手指,包括安装座,手指单元设置于安装座上,每个手指单元包括经两个手指关节连接起来的三个指节,手指关节通过钢线分别连接于螺杆的螺母上;机械手腕,连接轴将手臂支架上的第一转座和手指安装座上的第二转座连接起来,机械手腕还包括啮合传动的齿轮组,其中第一锥齿轮同步于电机二的转轴,第二锥齿轮固定套接于连接轴上。本发明仿生程度高,能自主调整抓取力

一种基于仿树枝结构的全柔性仿生气动式机械手.pdf
一种基于仿树枝结构的全柔性仿生气动式机械手,包括气动驱动单元和各自独立控制的机械手单元,所述机械手单元包括整体形状呈仿生树枝结构的壳体,其至少一个沿长度方向的表面采用锯齿状结构,所述壳体内部具有形状一致的腔体,在与所述锯齿状结构相对位置的壳体表面还叠设有应变限制层,所述壳体和应变限制层均采用柔性材料,且应变限制层所采用杨氏模量大于腔体的柔性材料;所述仿生树枝结构的壳体和腔体均由一级主支部和若干级分支部构成,多级分支部的分支数量按照预定规律递增,各支部的分支的腔体分别与所述气动驱动单元相连且相互独立。本发明
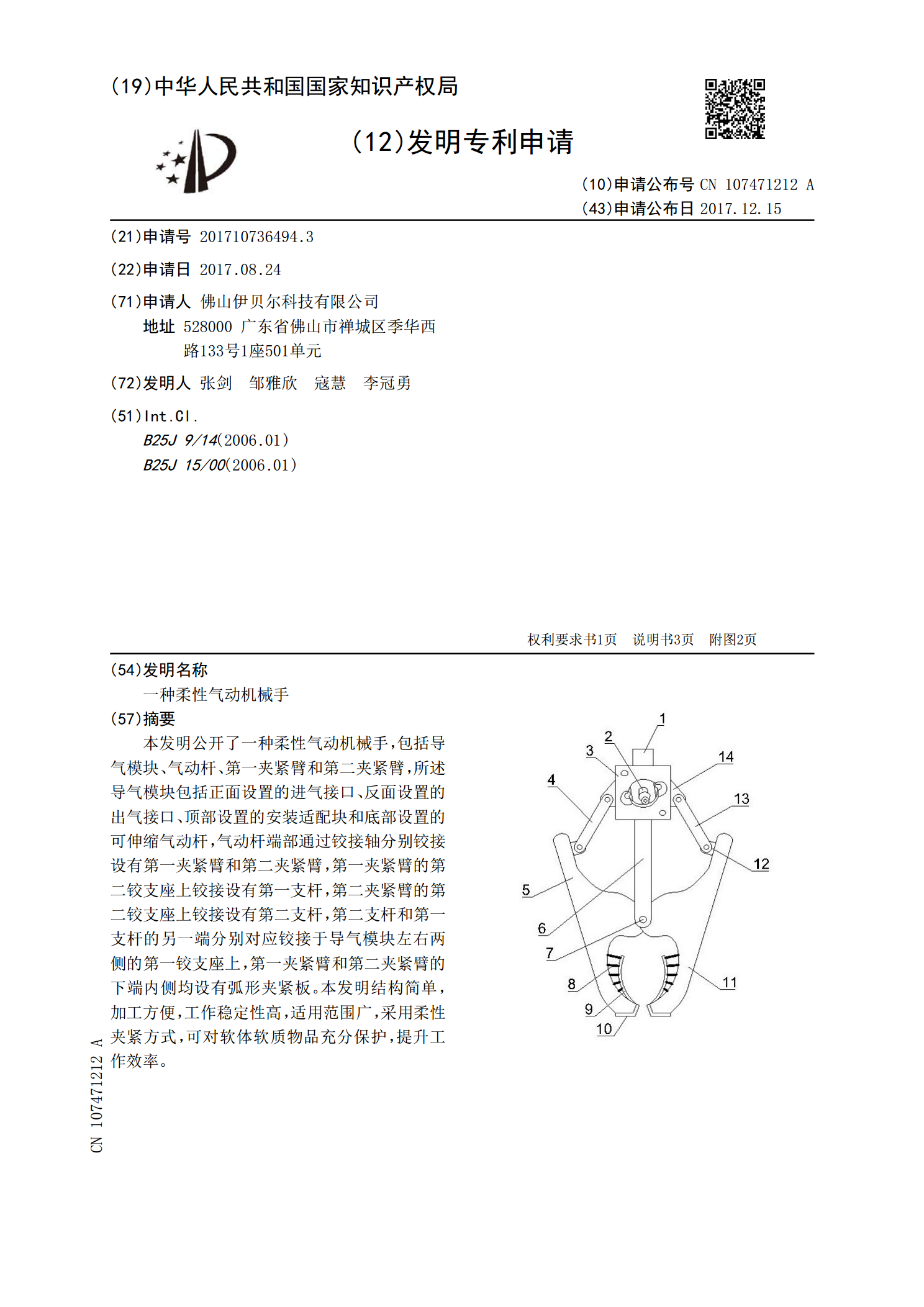
一种柔性气动机械手.pdf
本发明公开了一种柔性气动机械手,包括导气模块、气动杆、第一夹紧臂和第二夹紧臂,所述导气模块包括正面设置的进气接口、反面设置的出气接口、顶部设置的安装适配块和底部设置的可伸缩气动杆,气动杆端部通过铰接轴分别铰接设有第一夹紧臂和第二夹紧臂,第一夹紧臂的第二铰支座上铰接设有第一支杆,第二夹紧臂的第二铰支座上铰接设有第二支杆,第二支杆和第一支杆的另一端分别对应铰接于导气模块左右两侧的第一铰支座上,第一夹紧臂和第二夹紧臂的下端内侧均设有弧形夹紧板。本发明结构简单,加工方便,工作稳定性高,适用范围广,采用柔性夹紧方式

自适应柔性机械手爪.pdf
本发明涉及机器人手爪领域,尤其涉及自适应柔性机械手爪,包括固定体和牵引机构,固定体上转动连接有主动齿轮和从动齿轮,主动齿轮和从动齿轮啮合,固定体上设有第一销孔,主动齿轮上设有能够与第一销孔正对的第二销孔;还包括外壳体,外壳体上贯穿有竖向设置的滑槽,固定体竖向滑动连接在滑槽内,滑槽一侧的内壁上设有电磁铁和永磁铁,滑槽另一侧的内壁上设有销腔,电磁铁、永磁铁均与销腔相对,销腔内设有固定销,固定销所在直线能够与第一销孔所在直线重合,固定销靠近于电磁铁的一端具有磁体,磁体与电磁铁的磁性相反,磁体与永磁铁的磁性相同。