
测力扶手、电动床和电动床的控制方法.pdf

茂学****23

1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
测力扶手、电动床和电动床的控制方法.pdf
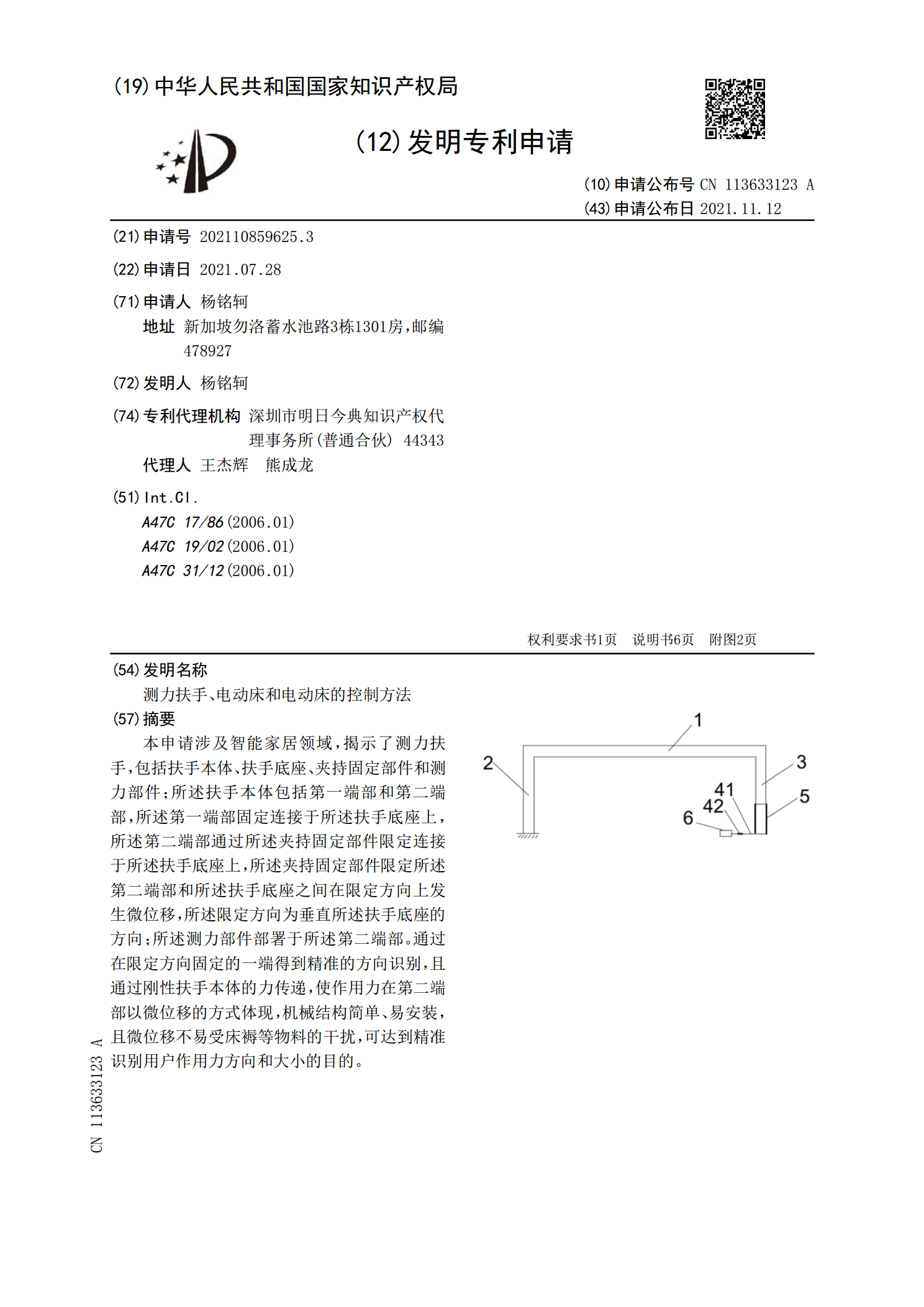
本申请涉及智能家居领域,揭示了测力扶手,包括扶手本体、扶手底座、夹持固定部件和测力部件;所述扶手本体包括第一端部和第二端部,所述第一端部固定连接于所述扶手底座上,所述第二端部通过所述夹持固定部件限定连接于所述扶手底座上,所述夹持固定部件限定所述第二端部和所述扶手底座之间在限定方向上发生微位移,所述限定方向为垂直所述扶手底座的方向;所述测力部件部署于所述第二端部。通过在限定方向固定的一端得到精准的方向识别,且通过刚性扶手本体的力传递,使作用力在第二端部以微位移的方式体现,机械结构简单、易安装,且微位移不易受

振动床腿、电动床及电动床的控制方法.pdf
本发明揭示了一种振动床腿、电动床及电动床的控制方法,一种振动床腿,包括固定件、支撑件、弹性件、预压机构和振动装置;支撑件用于支撑地面,在固定件的纵向与固定件相对设置;弹性件设于固定件与支撑件之间,其两端分别抵顶固定件和支撑件;预压机构用于预压弹性件;振动装置用于通过弹性件带动固定件上下振动。本发明振动床腿、电动床及电动床的控制方法,通过振动装置的带动,振动床腿产生往复伸缩,带动床体和床垫上下震动,让床按一定频率轻微震动,这些次声震动会让耳蜗中的平衡感受器官感受到,触觉感受器官也能清晰感受到,并最终影响脑电
电动床的调节方法及电动床、存储介质.pdf
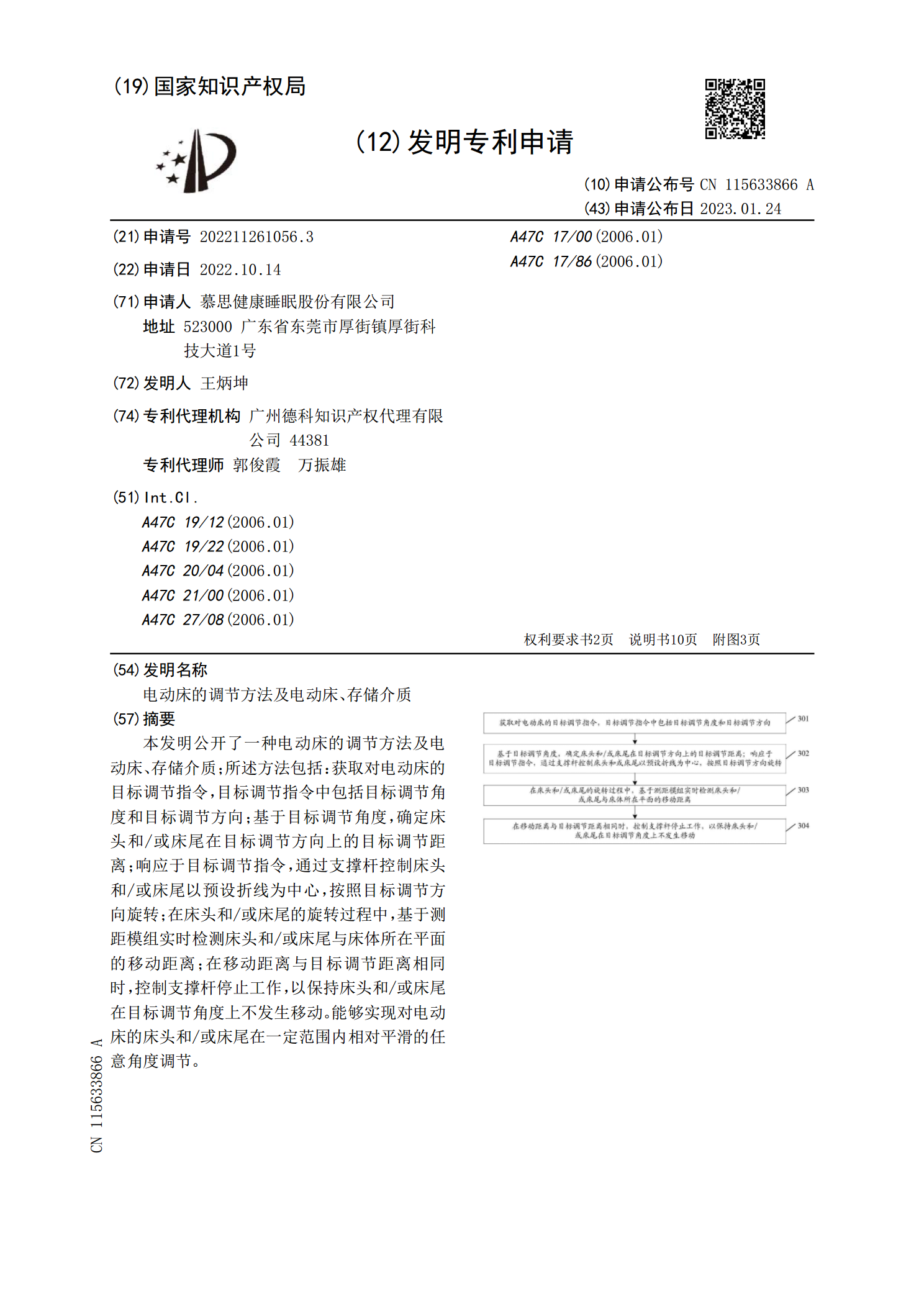
本发明公开了一种电动床的调节方法及电动床、存储介质;所述方法包括:获取对电动床的目标调节指令,目标调节指令中包括目标调节角度和目标调节方向;基于目标调节角度,确定床头和/或床尾在目标调节方向上的目标调节距离;响应于目标调节指令,通过支撑杆控制床头和/或床尾以预设折线为中心,按照目标调节方向旋转;在床头和/或床尾的旋转过程中,基于测距模组实时检测床头和/或床尾与床体所在平面的移动距离;在移动距离与目标调节距离相同时,控制支撑杆停止工作,以保持床头和/或床尾在目标调节角度上不发生移动。能够实现对电动床的床头和
电动床遥控器及遥控电动床的方法.pdf
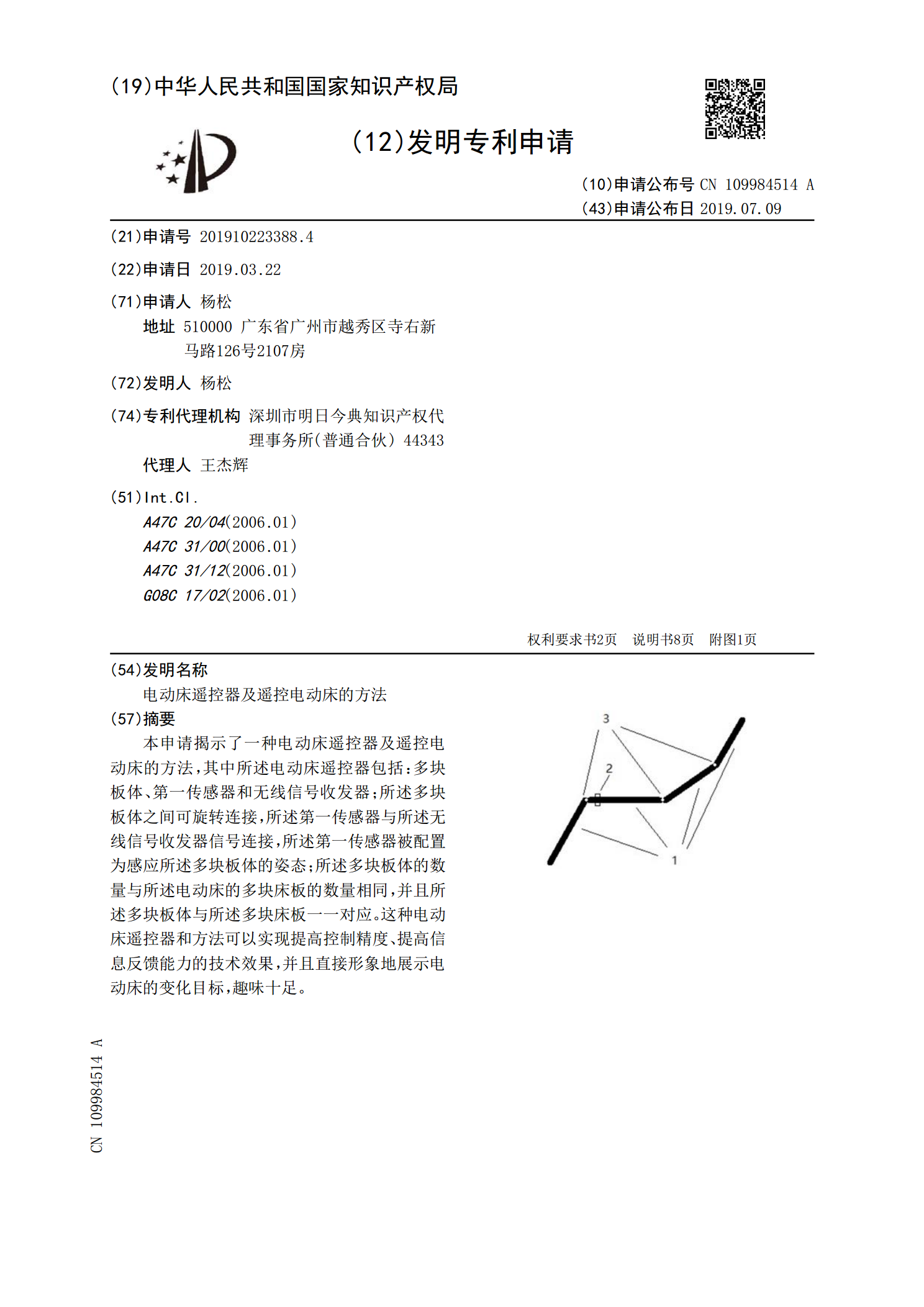
本申请揭示了一种电动床遥控器及遥控电动床的方法,其中所述电动床遥控器包括:多块板体、第一传感器和无线信号收发器;所述多块板体之间可旋转连接,所述第一传感器与所述无线信号收发器信号连接,所述第一传感器被配置为感应所述多块板体的姿态;所述多块板体的数量与所述电动床的多块床板的数量相同,并且所述多块板体与所述多块床板一一对应。这种电动床遥控器和方法可以实现提高控制精度、提高信息反馈能力的技术效果,并且直接形象地展示电动床的变化目标,趣味十足。

一种自动调节床角度的电动床控制方法和系统.pdf
本发明公开了一种自动调节床角度的电动床控制方法和系统,包括如下步骤:通过若干传感器采集用户睡眠数据,从而评估用户睡眠的质量,并得到匹配用户的床角度模式;根据用户历史睡眠数据与床角度模式,自动确定最适合用户睡眠的目标床角度模式,并控制床在目标角度模式下运行。实现对电动床的智能化控制,通过对床角度模式的控制使人体睡眠质量达到最优。