
基于北斗的微形变预测方法、装置、设备及可读存储介质.pdf

猫巷****忠娟

1/10
2/10
3/10
4/10
5/10
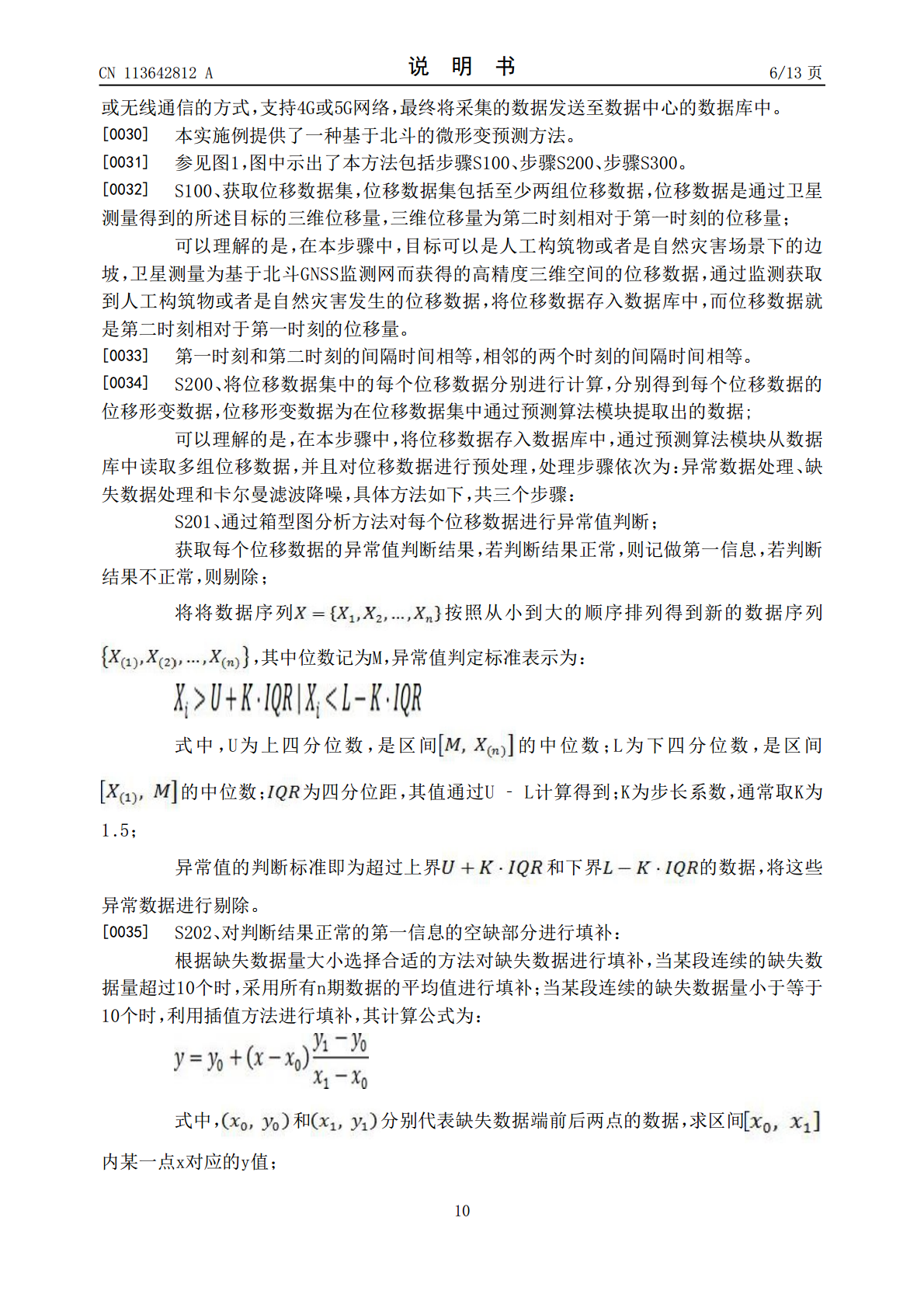
6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于北斗的微形变预测方法、装置、设备及可读存储介质.pdf
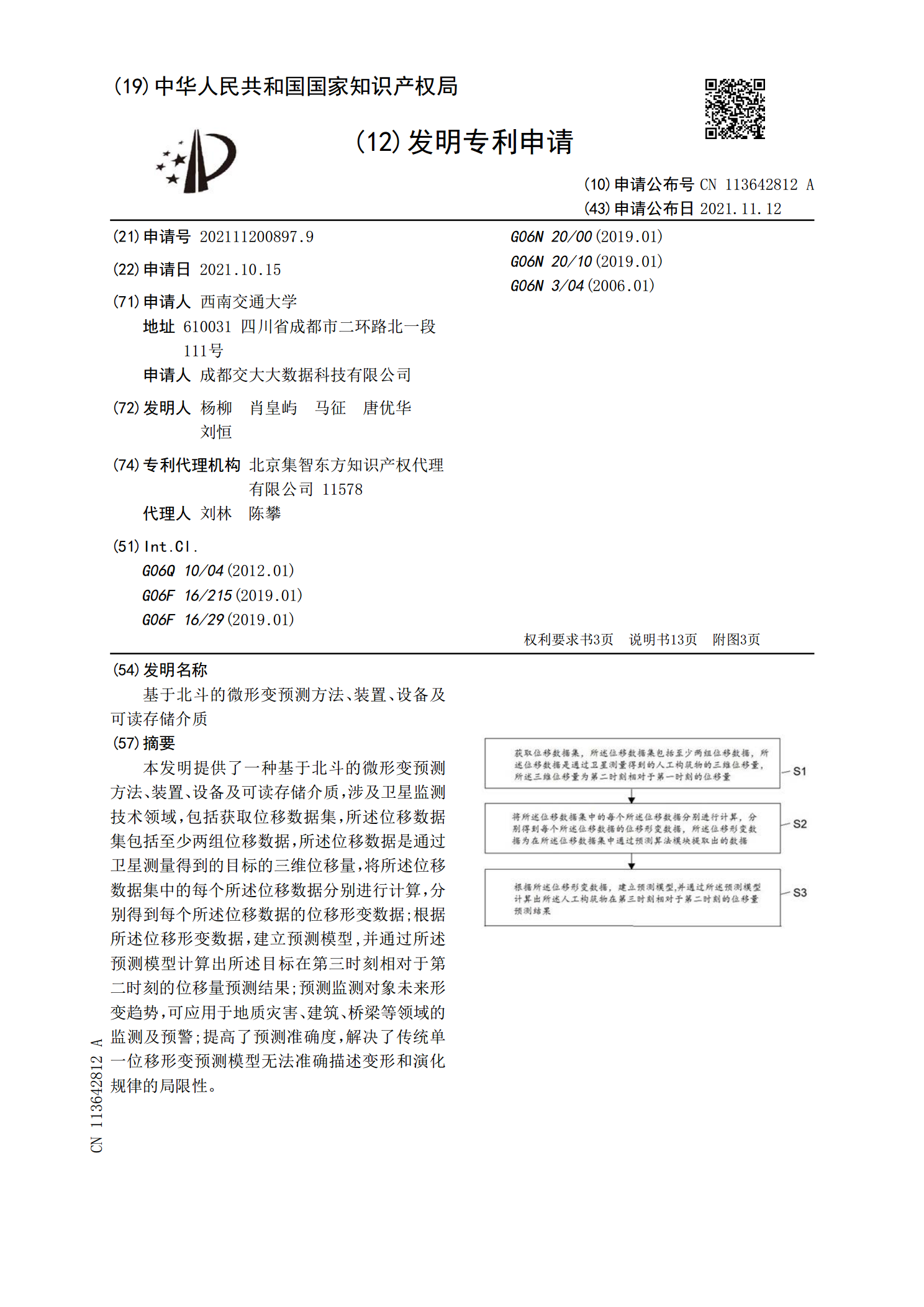
本发明提供了一种基于北斗的微形变预测方法、装置、设备及可读存储介质,涉及卫星监测技术领域,包括获取位移数据集,所述位移数据集包括至少两组位移数据,所述位移数据是通过卫星测量得到的目标的三维位移量,将所述位移数据集中的每个所述位移数据分别进行计算,分别得到每个所述位移数据的位移形变数据;根据所述位移形变数据,建立预测模型,并通过所述预测模型计算出所述目标在第三时刻相对于第二时刻的位移量预测结果;预测监测对象未来形变趋势,可应用于地质灾害、建筑、桥梁等领域的监测及预警;提高了预测准确度,解决了传统单一位移形变

基于流量预测的节能方法、装置及可读存储介质.pdf
本发明公开了一种基于流量预测的节能方法,该方法包括:获取用户的历史访问数据;根据所述历史访问数据确定待预测时间所对应的用户的预测访问数据;根据所述预测访问数据确定数据中心内目标设备的调整参数;根据所述调整参数对所述目标设备的参数进行调整,以调整所述数据中心的能耗。本发明还提供一种基于流量预测的节能装置及计算机可读存储介质。本发明的基于流量预测的节能方法,可灵活且有针对性应对数据中心的用户访问量发生改变如突增或者突减的情况,以适应于数据中心的用户访问量实现数据中心内的目标设备采用恰当的运行参数运行,从而能更
销量预测方法、装置、设备及可读存储介质.pdf
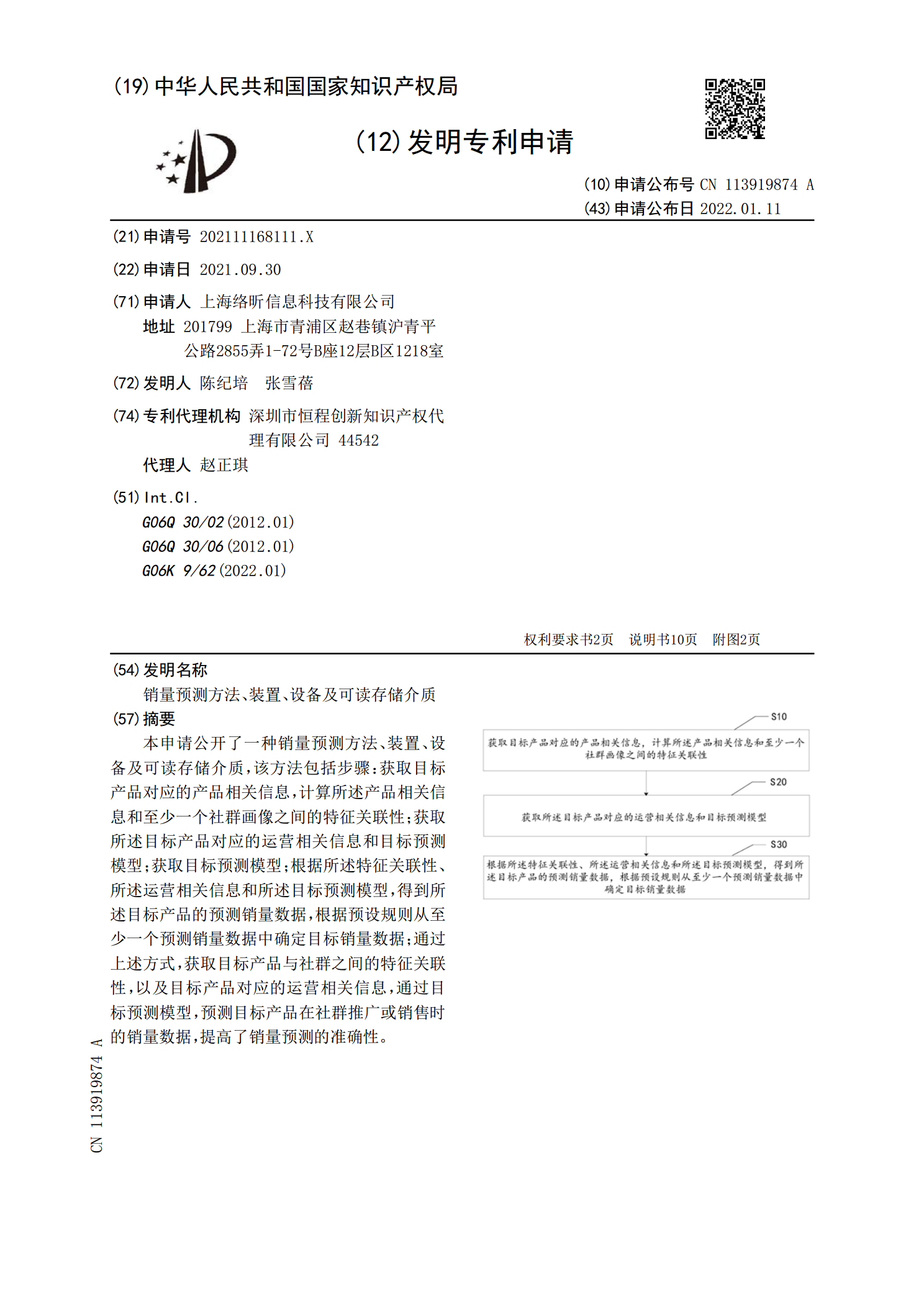
本申请公开了一种销量预测方法、装置、设备及可读存储介质,该方法包括步骤:获取目标产品对应的产品相关信息,计算所述产品相关信息和至少一个社群画像之间的特征关联性;获取所述目标产品对应的运营相关信息和目标预测模型;获取目标预测模型;根据所述特征关联性、所述运营相关信息和所述目标预测模型,得到所述目标产品的预测销量数据,根据预设规则从至少一个预测销量数据中确定目标销量数据;通过上述方式,获取目标产品与社群之间的特征关联性,以及目标产品对应的运营相关信息,通过目标预测模型,预测目标产品在社群推广或销售时的销量数据
流动量的预测方法、装置、设备及可读存储介质.pdf
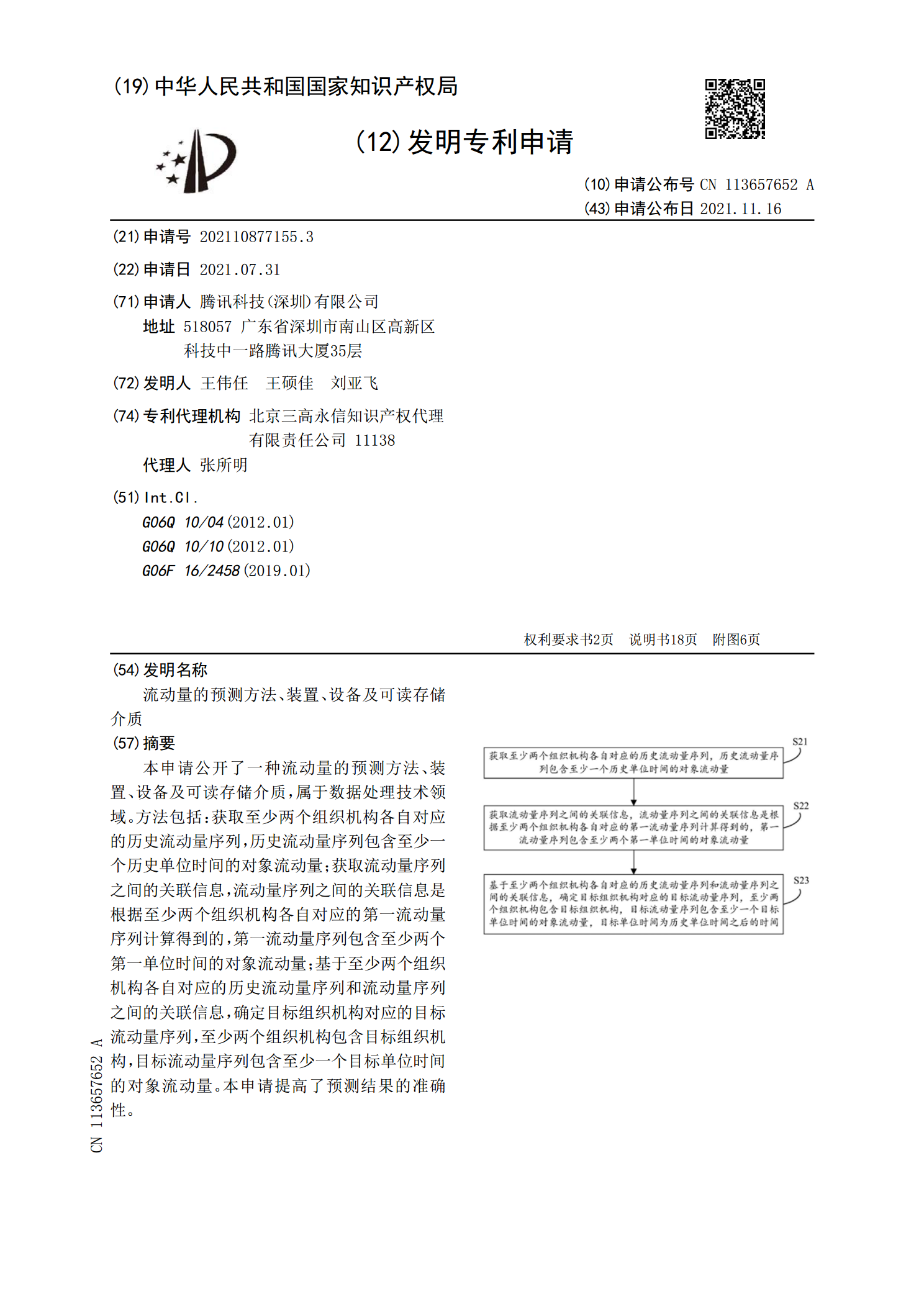
本申请公开了一种流动量的预测方法、装置、设备及可读存储介质,属于数据处理技术领域。方法包括:获取至少两个组织机构各自对应的历史流动量序列,历史流动量序列包含至少一个历史单位时间的对象流动量;获取流动量序列之间的关联信息,流动量序列之间的关联信息是根据至少两个组织机构各自对应的第一流动量序列计算得到的,第一流动量序列包含至少两个第一单位时间的对象流动量;基于至少两个组织机构各自对应的历史流动量序列和流动量序列之间的关联信息,确定目标组织机构对应的目标流动量序列,至少两个组织机构包含目标组织机构,目标流动量序
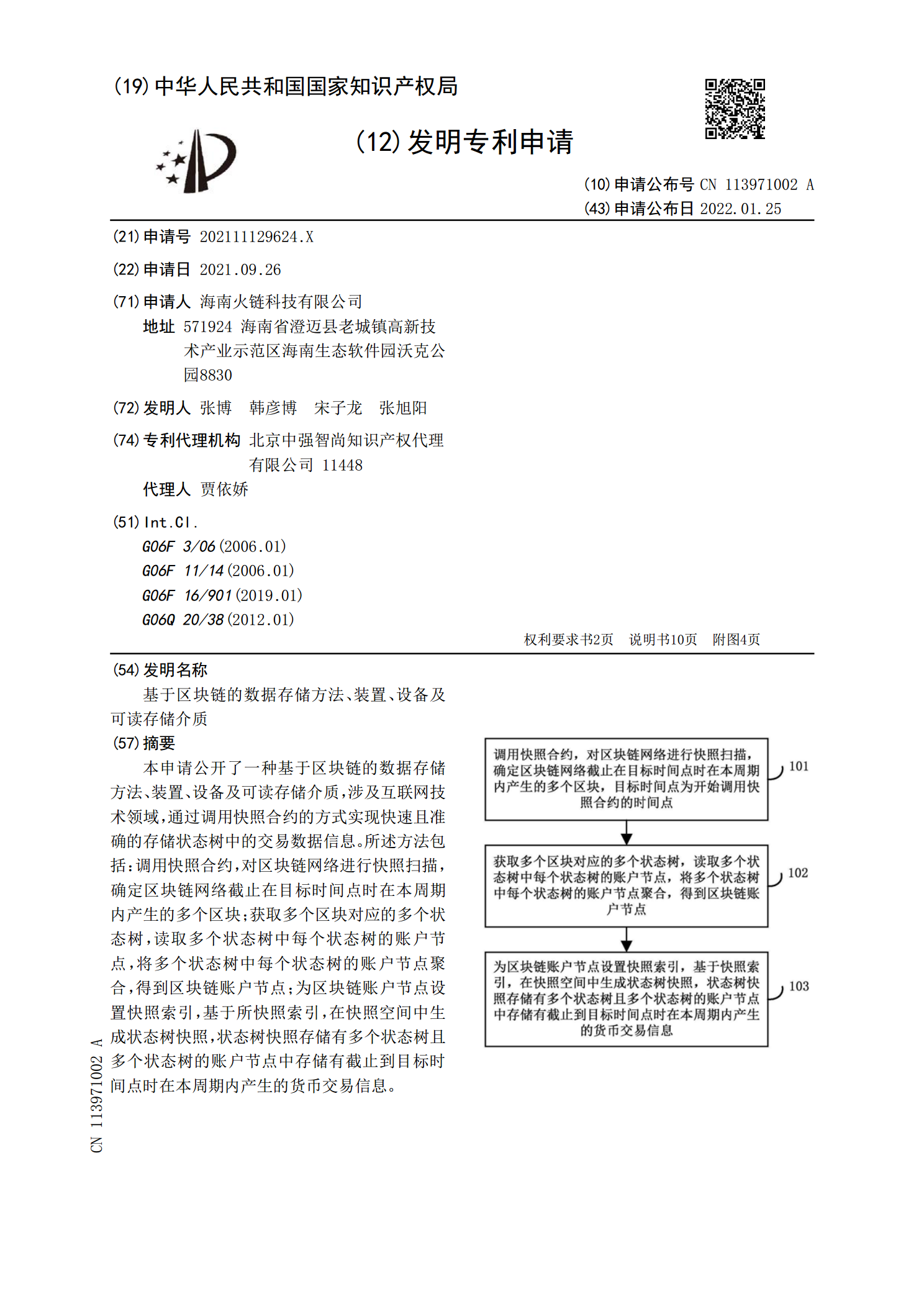
基于区块链的数据存储方法、装置、设备及可读存储介质.pdf
本申请公开了一种基于区块链的数据存储方法、装置、设备及可读存储介质,涉及互联网技术领域,通过调用快照合约的方式实现快速且准确的存储状态树中的交易数据信息。所述方法包括:调用快照合约,对区块链网络进行快照扫描,确定区块链网络截止在目标时间点时在本周期内产生的多个区块;获取多个区块对应的多个状态树,读取多个状态树中每个状态树的账户节点,将多个状态树中每个状态树的账户节点聚合,得到区块链账户节点;为区块链账户节点设置快照索引,基于所快照索引,在快照空间中生成状态树快照,状态树快照存储有多个状态树且多个状态树的账