
一种工件涂胶轨迹生成方法、装置、电子设备及存储介质.pdf

fu****级甜

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种工件涂胶轨迹生成方法、装置、电子设备及存储介质.pdf
本申请公开了一种工件涂胶轨迹生成方法,所述工件涂胶轨迹生成方法包括:利用双目结构光相机获取待涂胶工件的实际点云数据;对所述实际点云数据和标准点云数据进行点云匹配,得到匹配结果;其中,所述标准点云数据为所述双目结构光相机扫描标准工件得到的点云数据;根据所述匹配结果对所述标准工件对应的模板涂胶轨迹进行修正生成工件涂胶轨迹,以便利用所述工件涂胶轨迹对所述待涂胶工件执行涂胶操作。本申请能够生成准确的工件涂胶轨迹,提高涂胶精度。本申请还公开了一种工件涂胶轨迹生成装置、一种电子设备及一种存储介质,具有以上有益效果。

一种涂鸦轨迹生成方法、装置、电子设备及存储介质.pdf
本公开涉及一种涂鸦轨迹生成方法、装置、电子设备及存储介质,该方法包括:响应于基于目标页面的轨迹绘制操作,响应于基于目标页面的轨迹绘制操作,采集轨迹绘制操作所产生的多个滑动轨迹点,基于多个滑动轨迹点生成第一平滑曲线,再从第一平滑曲线上确定第一目标轨迹点集合;将各第一目标轨迹点与第一预设笔触图案进行叠加处理,形成第一涂鸦轨迹。如此,本公开最终形成第一涂鸦轨迹的各第一目标轨迹点是从多个滑动轨迹点对应的第一平滑曲线上确定的,各第一目标轨迹点之间不仅具有较好的平滑度,且可以保证生成的第一涂鸦轨迹与实际用户绘制的轨迹

轨迹点筛选及轨迹生成方法、装置、电子设备、存储介质.pdf
本公开实施例公开一种轨迹点筛选及轨迹生成方法、装置、设备、存储介质。轨迹点筛选方法包括:获取真实行驶轨迹的M个轨迹点;从M个轨迹点中获取当前的关键轨迹点,基于当前的关键轨迹点确定当前的基础斜率;在当前轨迹点不为第M个轨迹点的情况下,基于当前的基础斜率,M个轨迹点中前一个轨迹点与当前轨迹点之间的斜率,以及关键轨迹点与当前轨迹点之间的斜率,从M个轨迹点中确定下一个关键轨迹点和下一个基础斜率,直至遍历完M个轨迹点中的待筛选轨迹点的情况下,得到N?1个关键轨迹点;N?1个关键轨迹点和第M个轨迹点用于生成模拟轨迹。

行程轨迹生成方法、装置、电子设备及存储介质.pdf
本申请涉及定位分析技术领域,提供了一种行程轨迹生成方法、装置、电子设备及存储介质,行程轨迹生成方法包括:基于预设的空间聚类算法遍历按序排序的定位点,执行停留点识别:将一次遍历到的一个定位点作为中心点,确定所述定位点的邻域,并基于所述邻域确定目标点,并将满足预设停留条件的目标点设为停留点,遍历下一个定位点,重复执行停留点识别步骤,直至遍历结束;基于合并停留点后的定位点生成行程轨迹。本申请的实施有利于减少停留点对应的行程轨迹长度,进而有效解决行程计费异常的问题;进一步地,基于合并停留点后的定位点生成的行程轨迹
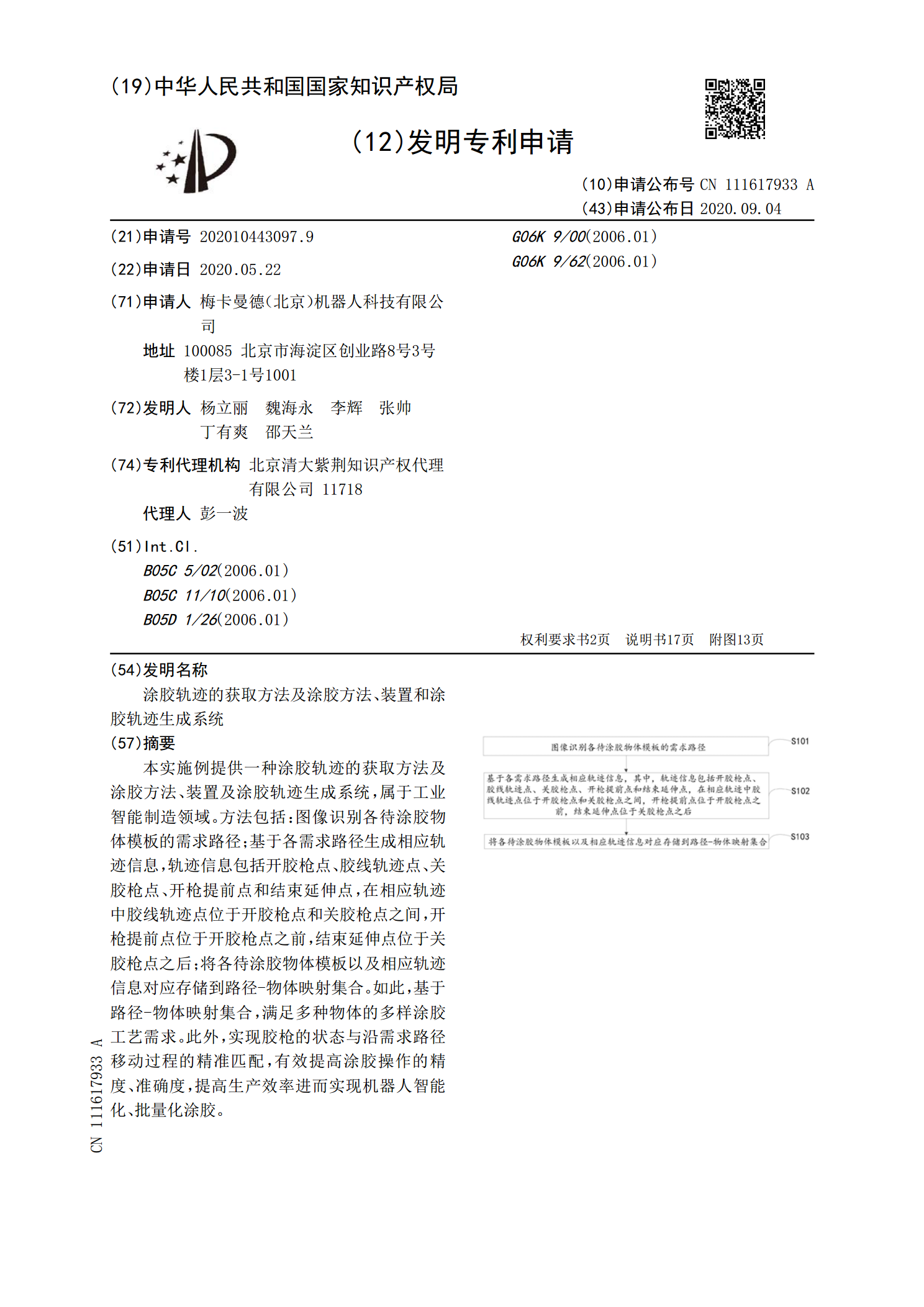
涂胶轨迹的获取方法及涂胶方法、装置和涂胶轨迹生成系统.pdf
本实施例提供一种涂胶轨迹的获取方法及涂胶方法、装置及涂胶轨迹生成系统,属于工业智能制造领域。方法包括:图像识别各待涂胶物体模板的需求路径;基于各需求路径生成相应轨迹信息,轨迹信息包括开胶枪点、胶线轨迹点、关胶枪点、开枪提前点和结束延伸点,在相应轨迹中胶线轨迹点位于开胶枪点和关胶枪点之间,开枪提前点位于开胶枪点之前,结束延伸点位于关胶枪点之后;将各待涂胶物体模板以及相应轨迹信息对应存储到路径‑物体映射集合。如此,基于路径‑物体映射集合,满足多种物体的多样涂胶工艺需求。此外,实现胶枪的状态与沿需求路径移动过程