
一种基于改进蚁群算法的路径规划方法.pdf

白凡****12

1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进蚁群算法的路径规划方法.pdf
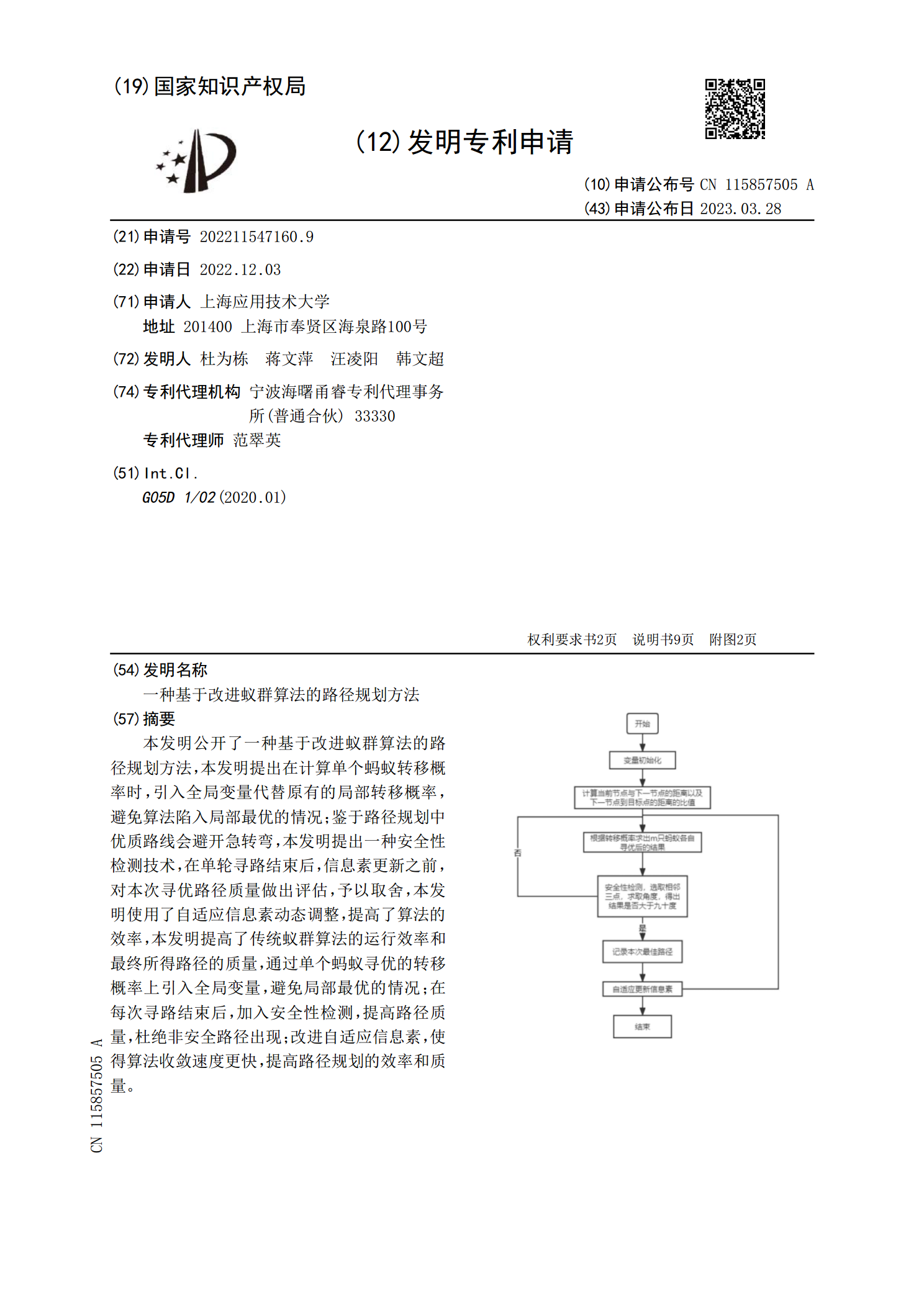
本发明公开了一种基于改进蚁群算法的路径规划方法,本发明提出在计算单个蚂蚁转移概率时,引入全局变量代替原有的局部转移概率,避免算法陷入局部最优的情况;鉴于路径规划中优质路线会避开急转弯,本发明提出一种安全性检测技术,在单轮寻路结束后,信息素更新之前,对本次寻优路径质量做出评估,予以取舍,本发明使用了自适应信息素动态调整,提高了算法的效率,本发明提高了传统蚁群算法的运行效率和最终所得路径的质量,通过单个蚂蚁寻优的转移概率上引入全局变量,避免局部最优的情况;在每次寻路结束后,加入安全性检测,提高路径质量,杜绝非
一种基于改进蚁群算法的路径规划方法.pdf
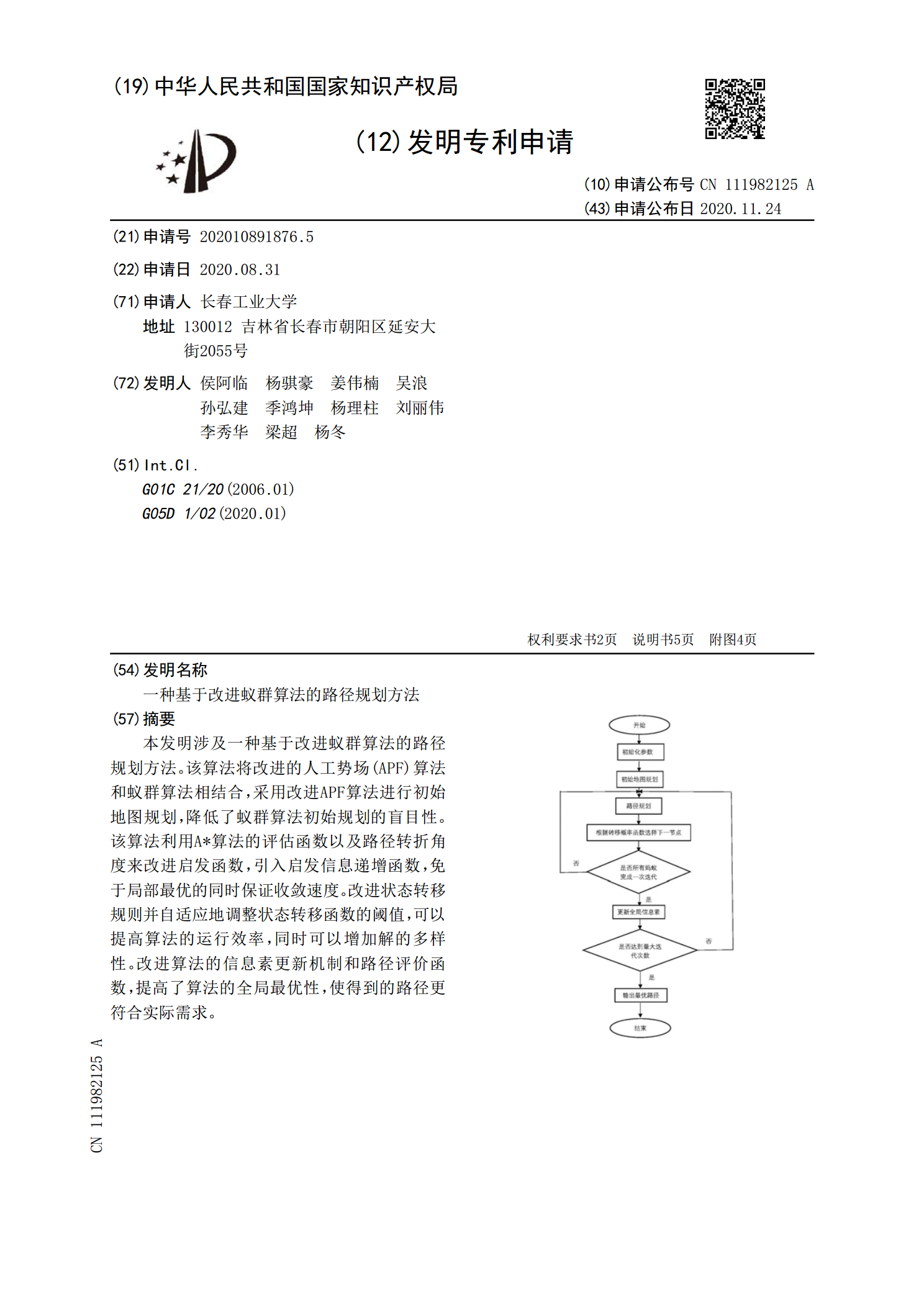
本发明涉及一种基于改进蚁群算法的路径规划方法。该算法将改进的人工势场(APF)算法和蚁群算法相结合,采用改进APF算法进行初始地图规划,降低了蚁群算法初始规划的盲目性。该算法利用A*算法的评估函数以及路径转折角度来改进启发函数,引入启发信息递增函数,免于局部最优的同时保证收敛速度。改进状态转移规则并自适应地调整状态转移函数的阈值,可以提高算法的运行效率,同时可以增加解的多样性。改进算法的信息素更新机制和路径评价函数,提高了算法的全局最优性,使得到的路径更符合实际需求。
一种基于改进蚁群算法的全局规划路径方法.pdf
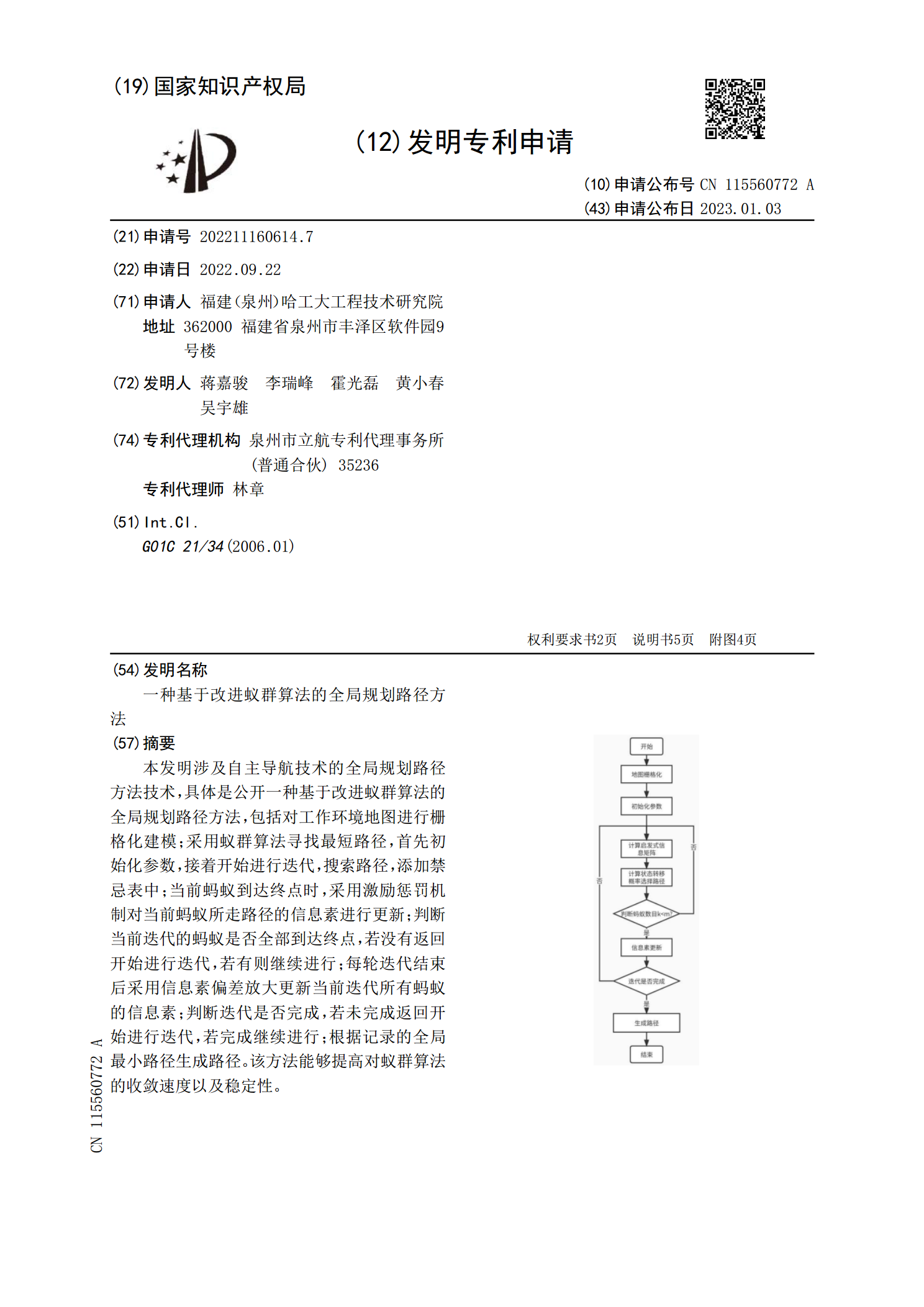
本发明涉及自主导航技术的全局规划路径方法技术,具体是公开一种基于改进蚁群算法的全局规划路径方法,包括对工作环境地图进行栅格化建模;采用蚁群算法寻找最短路径,首先初始化参数,接着开始进行迭代,搜索路径,添加禁忌表中;当前蚂蚁到达终点时,采用激励惩罚机制对当前蚂蚁所走路径的信息素进行更新;判断当前迭代的蚂蚁是否全部到达终点,若没有返回开始进行迭代,若有则继续进行;每轮迭代结束后采用信息素偏差放大更新当前迭代所有蚂蚁的信息素;判断迭代是否完成,若未完成返回开始进行迭代,若完成继续进行;根据记录的全局最小路径生成

基于改进蚁群算法的越野路径规划.docx
基于改进蚁群算法的越野路径规划摘要:越野路径规划是一项在复杂地形下规划路径的重要任务,它发挥着重要的应用价值。蚁群算法是一种组合优化算法,具有全局搜索能力和自适应性,被广泛应用于越野路径规划中。本文针对传统蚁群算法的缺陷,提出了改进蚁群算法,包括蚁群路线更新策略和局部搜索策略。在地形复杂的仿真环境下进行测试,结果表明改进蚁群算法能够更快、更准确地规划出越野车的路径。关键词:越野路径规划;蚁群算法;路线更新策略;局部搜索策略1.引言越野车在拓荒、考古、救援等领域有着重要的应用价值。但是,越野车在复杂地形下行
一种基于改进蚁群算法的叉车路径规划方法及系统.pdf
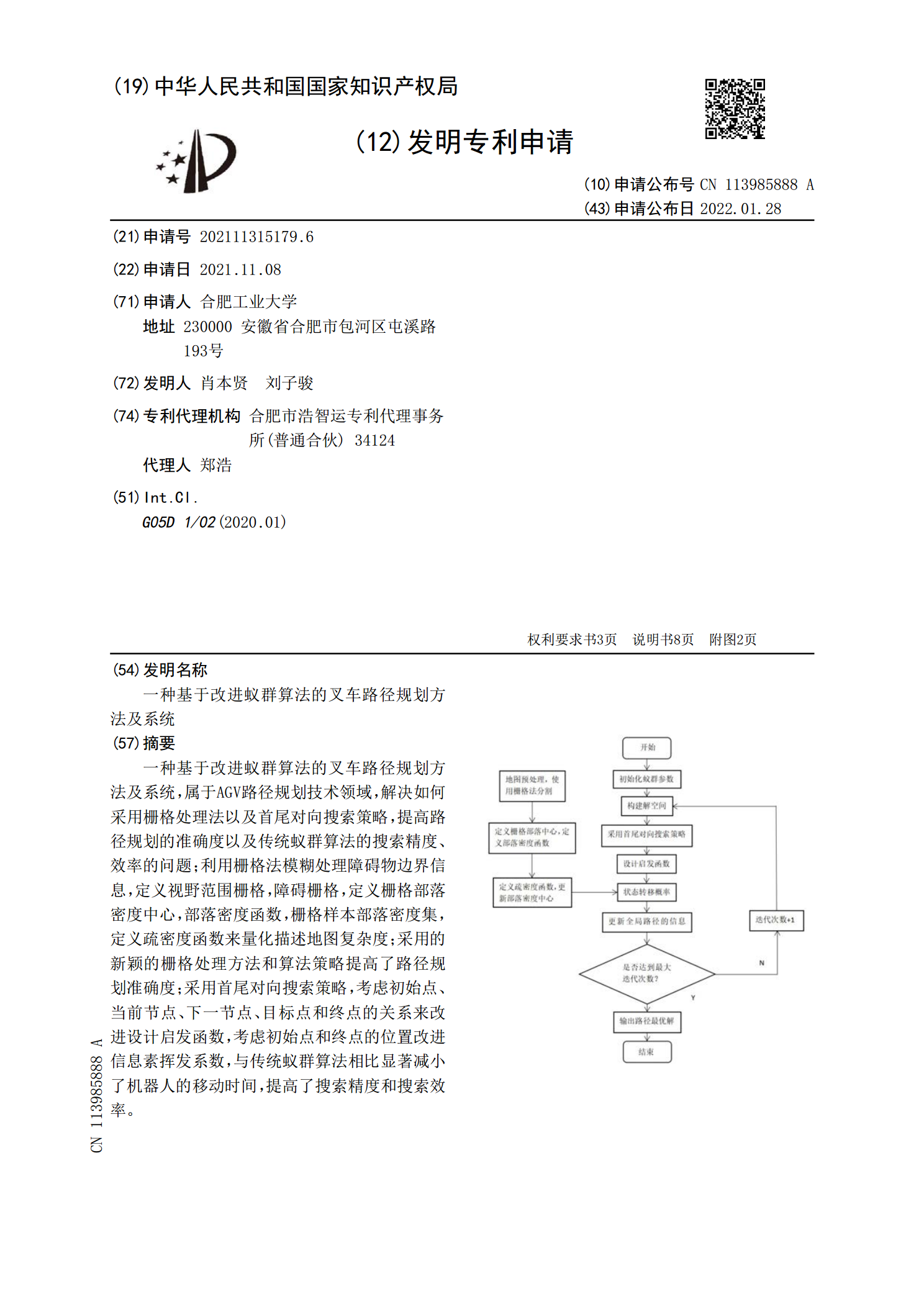
一种基于改进蚁群算法的叉车路径规划方法及系统,属于AGV路径规划技术领域,解决如何采用栅格处理法以及首尾对向搜索策略,提高路径规划的准确度以及传统蚁群算法的搜索精度、效率的问题;利用栅格法模糊处理障碍物边界信息,定义视野范围栅格,障碍栅格,定义栅格部落密度中心,部落密度函数,栅格样本部落密度集,定义疏密度函数来量化描述地图复杂度;采用的新颖的栅格处理方法和算法策略提高了路径规划准确度;采用首尾对向搜索策略,考虑初始点、当前节点、下一节点、目标点和终点的关系来改进设计启发函数,考虑初始点和终点的位置改进信息