
轮轨接触姿态测量的检测布局控制方法及装置、介质.pdf

猫巷****松臣

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮轨接触姿态测量的检测布局控制方法及装置、介质.pdf
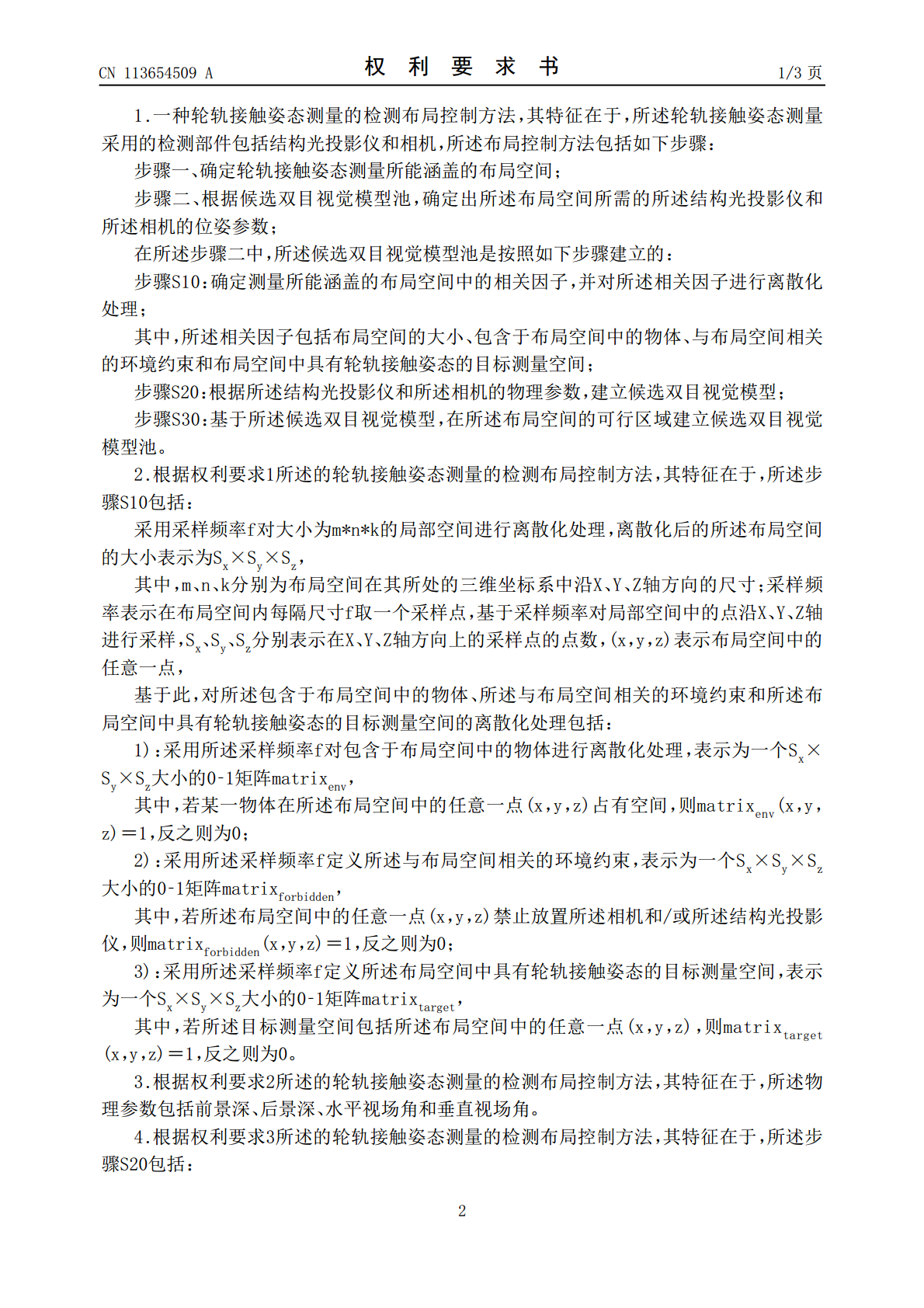
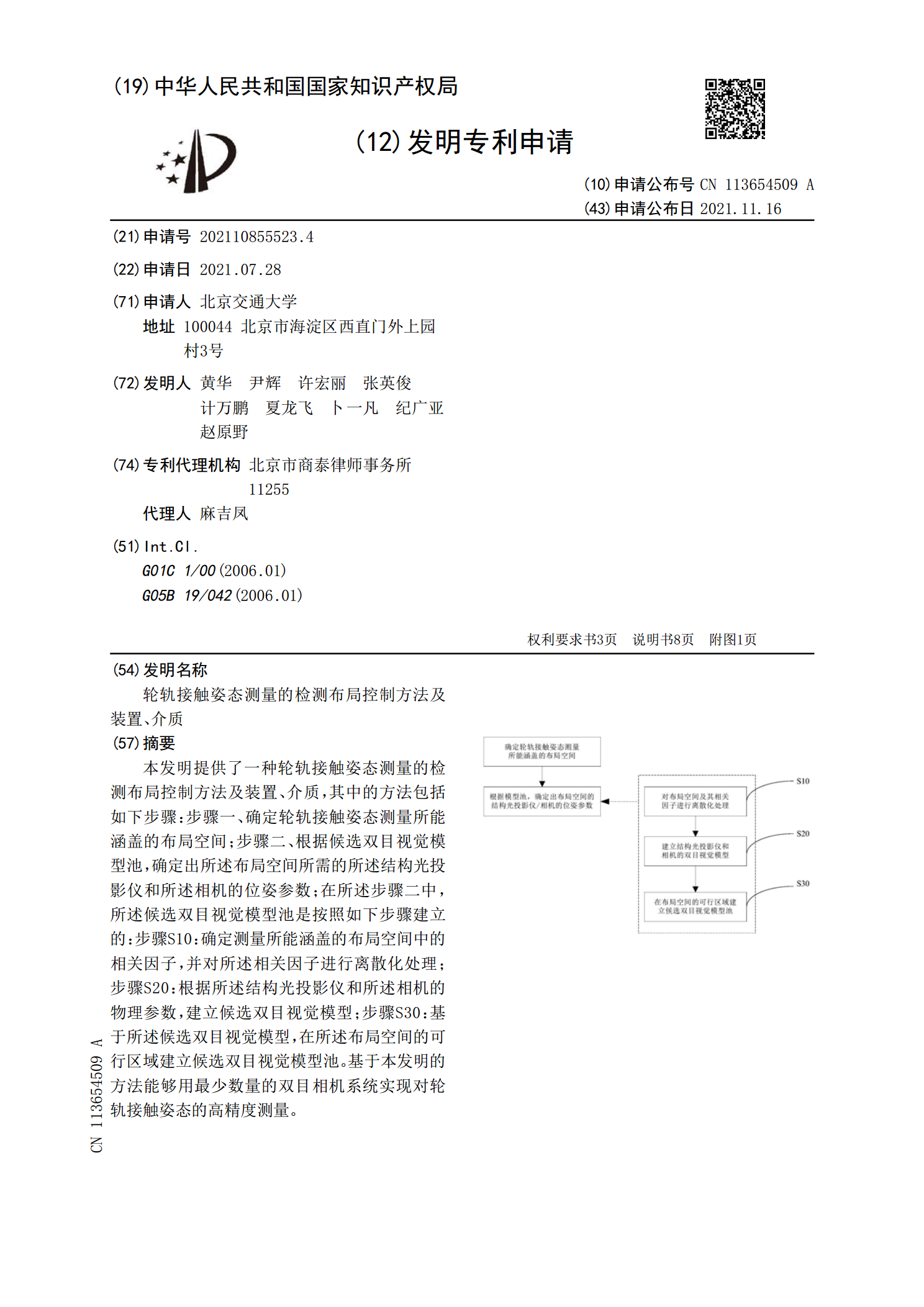
本发明提供了一种轮轨接触姿态测量的检测布局控制方法及装置、介质,其中的方法包括如下步骤:步骤一、确定轮轨接触姿态测量所能涵盖的布局空间;步骤二、根据候选双目视觉模型池,确定出所述布局空间所需的所述结构光投影仪和所述相机的位姿参数;在所述步骤二中,所述候选双目视觉模型池是按照如下步骤建立的:步骤S10:确定测量所能涵盖的布局空间中的相关因子,并对所述相关因子进行离散化处理;步骤S20:根据所述结构光投影仪和所述相机的物理参数,建立候选双目视觉模型;步骤S30:基于所述候选双目视觉模型,在所述布局空间的可行区

非接触测量轮轨横向力式装置及其测量方法.pdf
本发明涉及一种非接触测量轮轨横向力式装置及其测量方法。装置包括位移传感器、加速度传感器、激光传感器和传感器箱体;位移传感器、激光传感器和加速度传感器安装在传感器箱体中。传感器箱体上有箱体搭接板,通过其固定在列车的转向架上,相对轴承静止。参照非接触测量轮轨横向力式装置的测量方法,操作人员可以方便的安装使用本发明的装置,避免由于安装失误能造成的测量错误。本发明解决了判断列车脱轨横向力的问题,克服了测试轮轨横向力的复杂条件,提出的非接触测量轮轨横向力式装置,旨在利用轮轨形变位移和横向力的一一对应关系,将横向位移

轮轨接触关系可视化检测装置及其检测方法.pdf
本发明涉及轨道交通领域,具体为一种轮轨接触关系可视化检测装置及其检测方法。轮轨接触关系可视化检测装置包括测速单元、触发单元、拍摄单元、光源、处理单元以及标记物列;其中,光源包括面光源;测速单元、面光源、触发单元以及拍摄单元沿列车的行进方向依次分布;面光源为两个;两个面光源分别位于被测钢轨的两侧;拍摄单元为两个;两个拍摄单元分别位于被测钢轨的两侧;且位于被测钢轨一侧的拍摄单元与位于该被测钢轨另一侧的面光源相对;标记物列包括沿列车的行进方向依次分布在检测区域内的多个标记物;本发明提供的一种轮轨接触关系可视化检

轮轨接触状态评估方法和装置.pdf
本发明实施例提供一种轮轨接触状态评估方法和装置,所述方法包括:测取若干实际运营车辆的车轮型面和被评估钢轨型面;将所述车轮型面与被评估钢轨型面匹配,获取接触参数序列;根据所述接触参数相对于接触参数评估标准值的比例,评估所述被评估钢轨。采用本发明的技术方案,通过统计的方法根据接触参数序列分析得到接触参数的分布规律,每项接触参数与轮轨动力学性能之间有对应关系,根据接触参数相对于接触参数评估标准值的比例,可以准确评估被评估钢轨型面的优劣,并进一步地确定被评估钢轨型面的维修等级。
测量控制方法、装置及存储介质.pdf
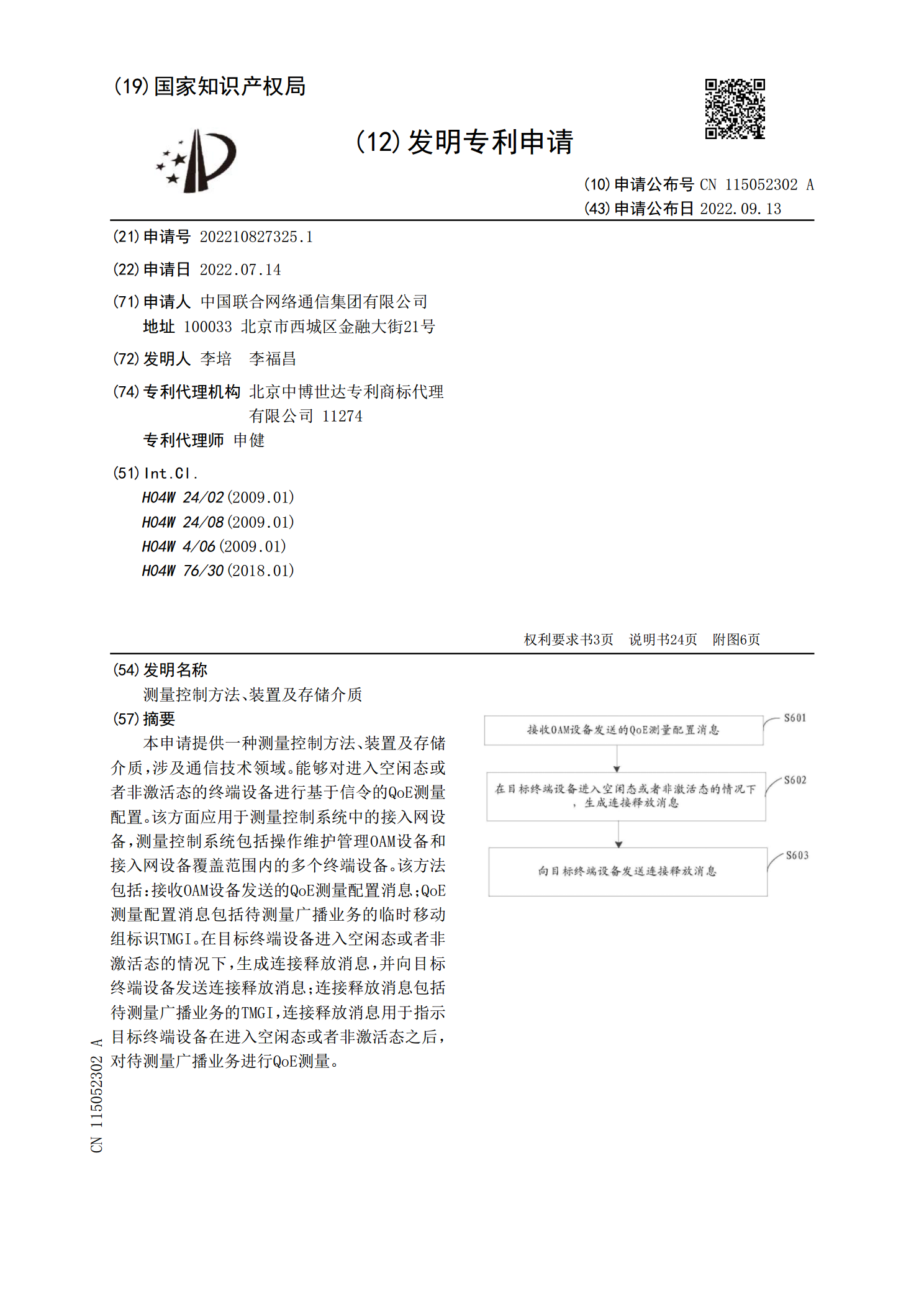
本申请提供一种测量控制方法、装置及存储介质,涉及通信技术领域。能够对进入空闲态或者非激活态的终端设备进行基于信令的QoE测量配置。该方面应用于测量控制系统中的接入网设备,测量控制系统包括操作维护管理OAM设备和接入网设备覆盖范围内的多个终端设备。该方法包括:接收OAM设备发送的QoE测量配置消息;QoE测量配置消息包括待测量广播业务的临时移动组标识TMGI。在目标终端设备进入空闲态或者非激活态的情况下,生成连接释放消息,并向目标终端设备发送连接释放消息;连接释放消息包括待测量广播业务的TMGI,连接释放消