
远程驾驶控制方法、装置、电子设备和计算机可读存储介质.pdf

是翠****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

远程驾驶控制方法、装置、电子设备和计算机可读存储介质.pdf
本申请是关于一种远程驾驶控制方法、装置、电子设备和计算机可读存储介质。该方法包括:接收待控制车端当前的行驶环境信息;根据待控制车端当前的行驶环境信息,生成智能驾驶舱的车速踏板行程信号;将车速踏板行程信号映射为所述待控制车端的车速控制指令,其中,车速控制指令包括待控制车端的目标车速值、目标减速值或加速度值;发送车速控制指令至待控制车端,以使待控制车端的车辆纵向控制系统按照车速控制指令控制待控制车端自动行驶。本申请提供的方案,能够使得车端的减速能够符合用户的预期,车速也能更加平稳。
远程驾驶的控制方法、装置、计算机可读介质及电子设备.pdf
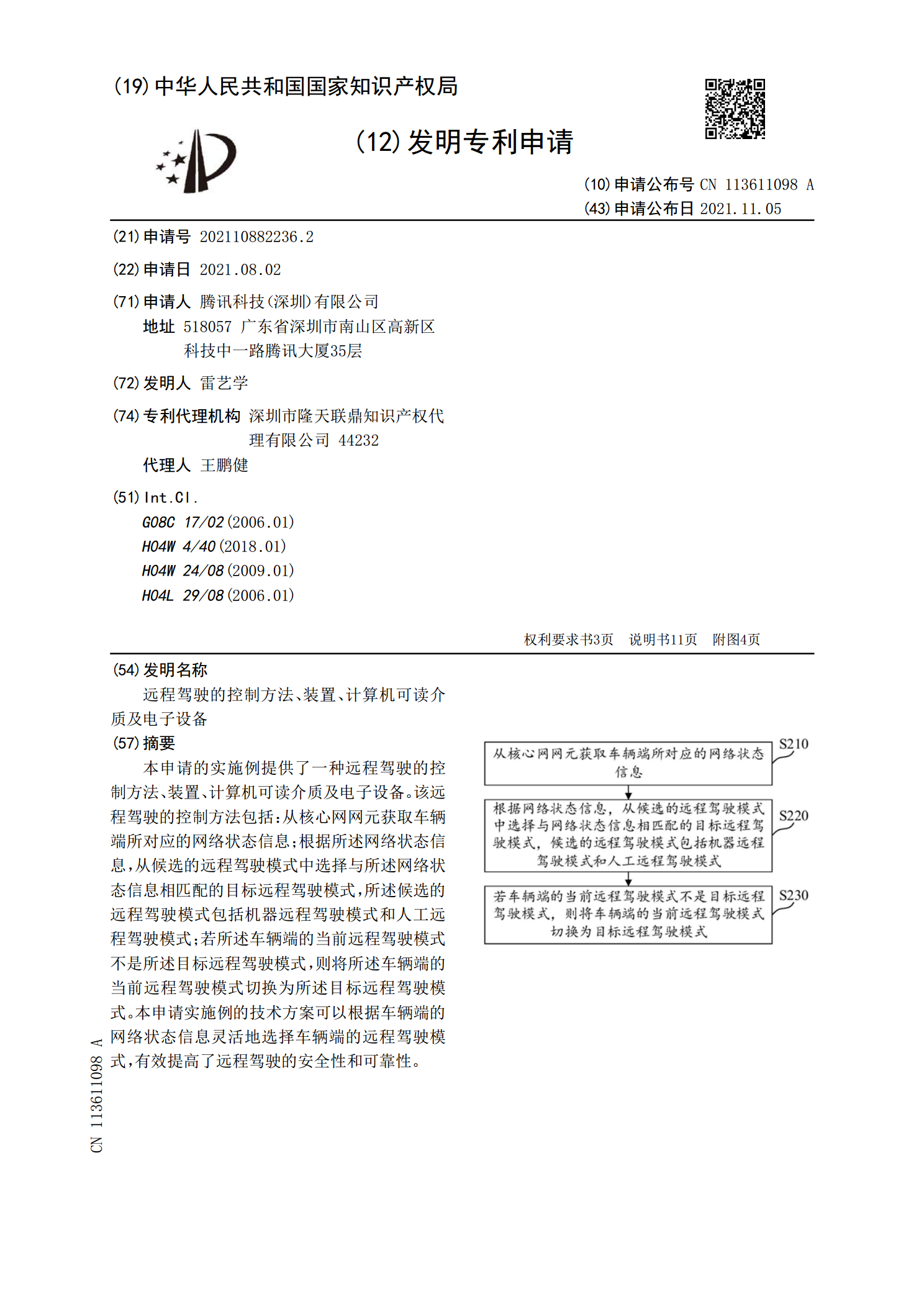
本申请的实施例提供了一种远程驾驶的控制方法、装置、计算机可读介质及电子设备。该远程驾驶的控制方法包括:从核心网网元获取车辆端所对应的网络状态信息;根据所述网络状态信息,从候选的远程驾驶模式中选择与所述网络状态信息相匹配的目标远程驾驶模式,所述候选的远程驾驶模式包括机器远程驾驶模式和人工远程驾驶模式;若所述车辆端的当前远程驾驶模式不是所述目标远程驾驶模式,则将所述车辆端的当前远程驾驶模式切换为所述目标远程驾驶模式。本申请实施例的技术方案可以根据车辆端的网络状态信息灵活地选择车辆端的远程驾驶模式,有效提高了远

控制方法、装置、电子设备和计算机可读存储介质.pdf
本申请提出一种控制方法、装置、电子设备和计算机可读存储介质,其中,方法应用于成像设备,成像设备包括由多个感光像素单元组成的像素单元阵列,每一感光像素单元包括的至少两曝光像素中含至少一中曝光像素,方法包括:确定环境亮度的亮度等级;亮度等级包括亮度从小到大排列的低亮度等级、中亮度等级和高亮度等级;若拍摄环境的亮度等级属于高亮度等级或低亮度等级时,调整各感光像素单元中的中曝光像素的占比为第一数值;若拍摄环境的亮度等级属于中亮度等级时,调整各感光像素单元中的中曝光像素的占比为第二数值;其中,第一数值大于第二数值。

控制方法、装置、电子设备和计算机可读存储介质.pdf
本申请提出一种控制方法、装置、电子设备和计算机可读存储介质,其中,方法应用于成像设备,成像设备包括多个曝光像素组成的像素单元阵列,各曝光像素为短曝光像素、中曝光像素或长曝光像素,方法包括:确定环境亮度的亮度等级;若拍摄环境的亮度等级属于高亮度等级或低亮度等级时,调整短曝光像素、中曝光像素和/或长曝光像素在像素单元阵列中的排布位置,以使至少两个中曝光像素相邻排布,将相邻排布的至少两个中曝光像素作为第一像素单元;根据第一像素单元中至少两个中曝光像素输出像素值进行成像。该方法能够保留拍摄图像中较多的有效信息,提

天线控制方法和装置、电子设备、计算机可读存储介质.pdf
本申请涉及一种天线控制方法和装置、电子设备、计算机可读存储介质,控制方法包括在预设场景下获取所述天线的工作频段和发射功率;根据所述工作频段和发射功率检测所述天线的比吸收率是否超过预设阈值;当所述比吸收率超过预设阈值时,驱动所述运动组件由第一位置移动至第二位置;其中,在第一位置时所述运动组件收容于所述电子设备开设的安装槽中,在第二位置时所述运动组件露出所述安装槽,以改变所述天线的辐射环境,提升了天线效率,这样可以降低手机的板级发射功率,从而保证SAR值不超标,降低电磁辐射对人体健康的影响。