
红外图像中船舶的检测方法、装置、电子设备和介质.pdf

如灵****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
红外图像中船舶的检测方法、装置、电子设备和介质.pdf
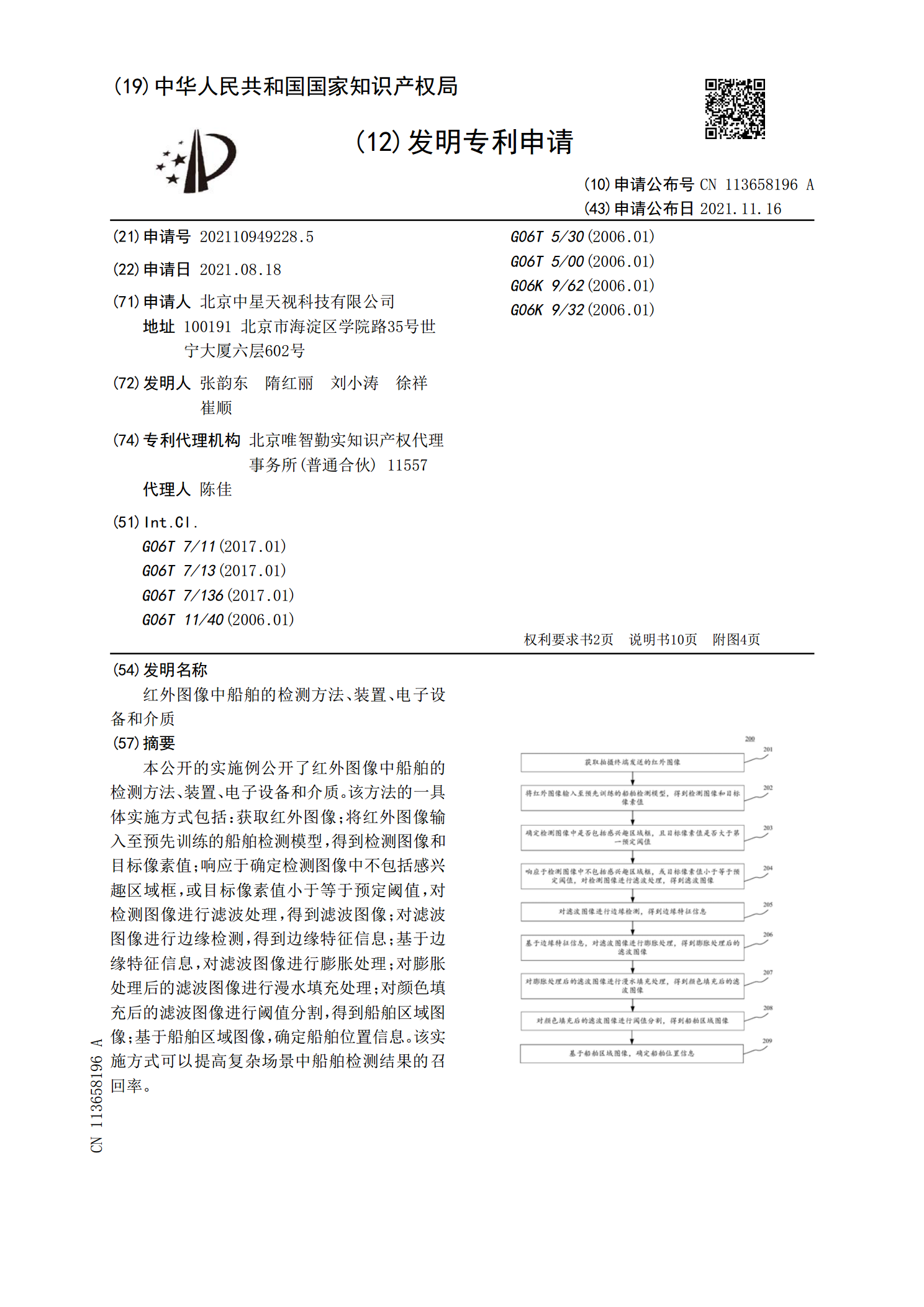
本公开的实施例公开了红外图像中船舶的检测方法、装置、电子设备和介质。该方法的一具体实施方式包括:获取红外图像;将红外图像输入至预先训练的船舶检测模型,得到检测图像和目标像素值;响应于确定检测图像中不包括感兴趣区域框,或目标像素值小于等于预定阈值,对检测图像进行滤波处理,得到滤波图像;对滤波图像进行边缘检测,得到边缘特征信息;基于边缘特征信息,对滤波图像进行膨胀处理;对膨胀处理后的滤波图像进行漫水填充处理;对颜色填充后的滤波图像进行阈值分割,得到船舶区域图像;基于船舶区域图像,确定船舶位置信息。该实施方式可
同步轨道卫星红外图像船舶检测方法、装置、设备及介质.pdf
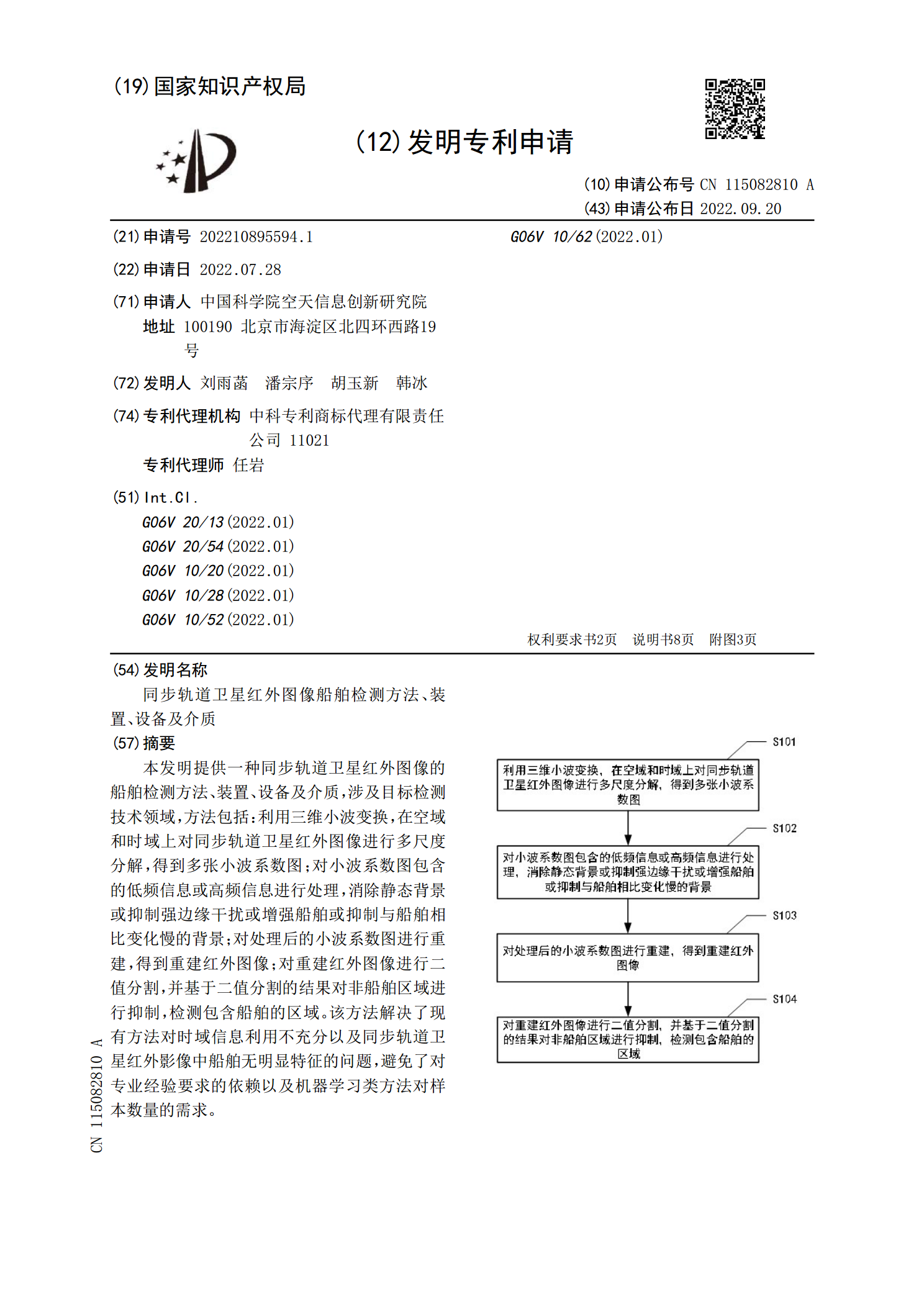
本发明提供一种同步轨道卫星红外图像的船舶检测方法、装置、设备及介质,涉及目标检测技术领域,方法包括:利用三维小波变换,在空域和时域上对同步轨道卫星红外图像进行多尺度分解,得到多张小波系数图;对小波系数图包含的低频信息或高频信息进行处理,消除静态背景或抑制强边缘干扰或增强船舶或抑制与船舶相比变化慢的背景;对处理后的小波系数图进行重建,得到重建红外图像;对重建红外图像进行二值分割,并基于二值分割的结果对非船舶区域进行抑制,检测包含船舶的区域。该方法解决了现有方法对时域信息利用不充分以及同步轨道卫星红外影像中船
图像检测方法、图像检测装置、电子设备和存储介质.pdf
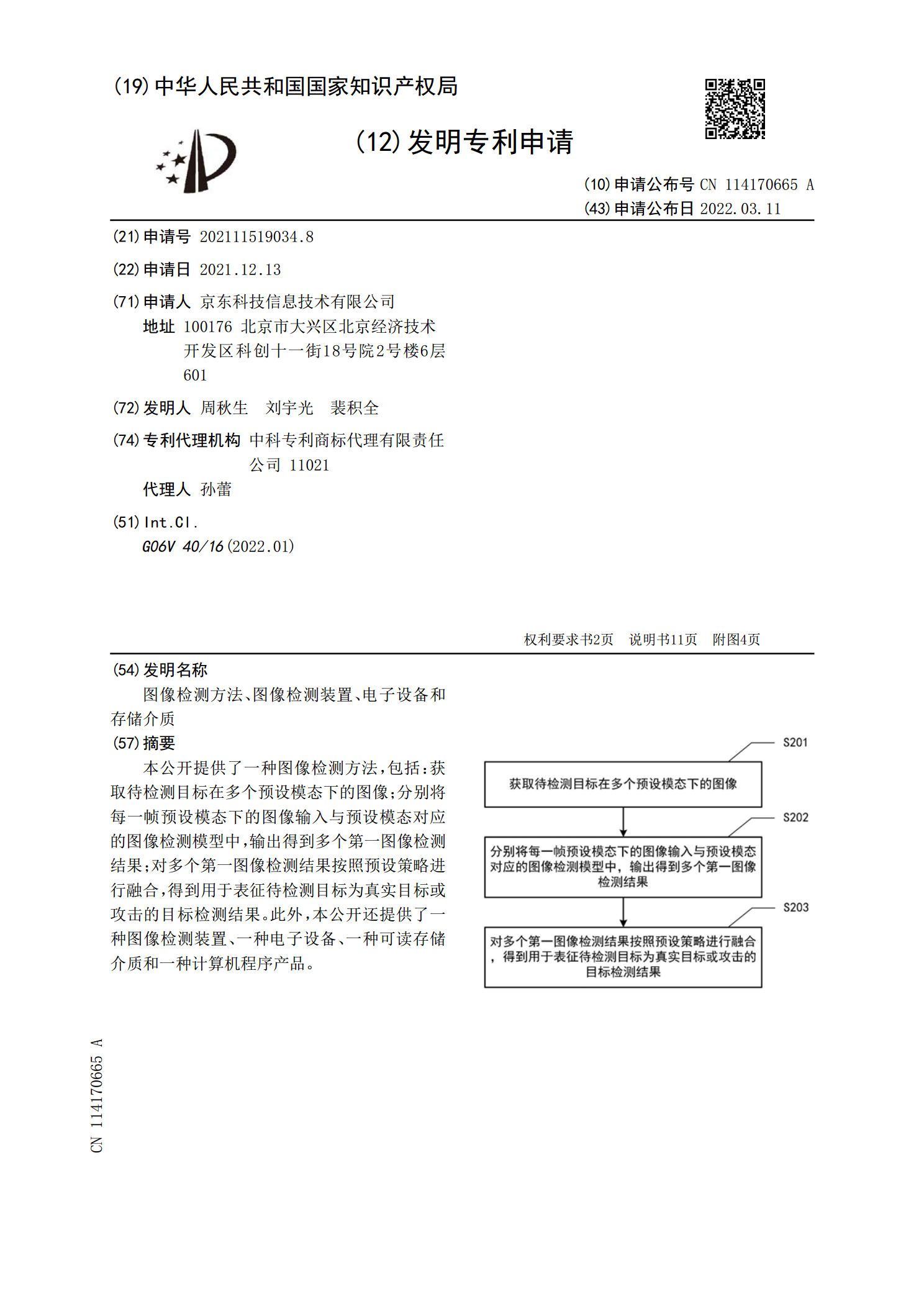
本公开提供了一种图像检测方法,包括:获取待检测目标在多个预设模态下的图像;分别将每一帧预设模态下的图像输入与预设模态对应的图像检测模型中,输出得到多个第一图像检测结果;对多个第一图像检测结果按照预设策略进行融合,得到用于表征待检测目标为真实目标或攻击的目标检测结果。此外,本公开还提供了一种图像检测装置、一种电子设备、一种可读存储介质和一种计算机程序产品。
图像和视频检测方法、装置、电子设备和介质.pdf
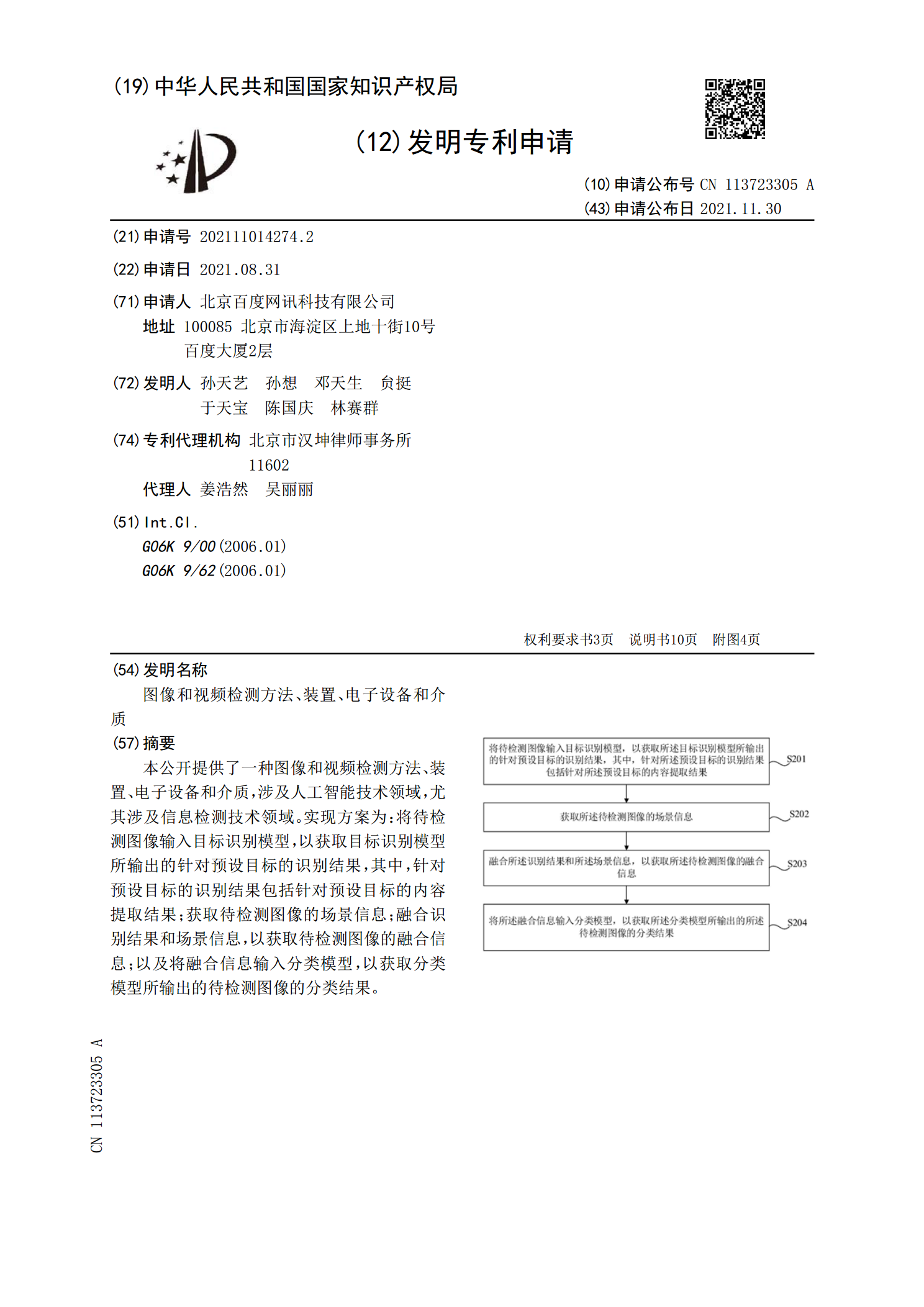
本公开提供了一种图像和视频检测方法、装置、电子设备和介质,涉及人工智能技术领域,尤其涉及信息检测技术领域。实现方案为:将待检测图像输入目标识别模型,以获取目标识别模型所输出的针对预设目标的识别结果,其中,针对预设目标的识别结果包括针对预设目标的内容提取结果;获取待检测图像的场景信息;融合识别结果和场景信息,以获取待检测图像的融合信息;以及将融合信息输入分类模型,以获取分类模型所输出的待检测图像的分类结果。
红外图像与可见光图像融合方法、装置、电子设备及介质.pdf
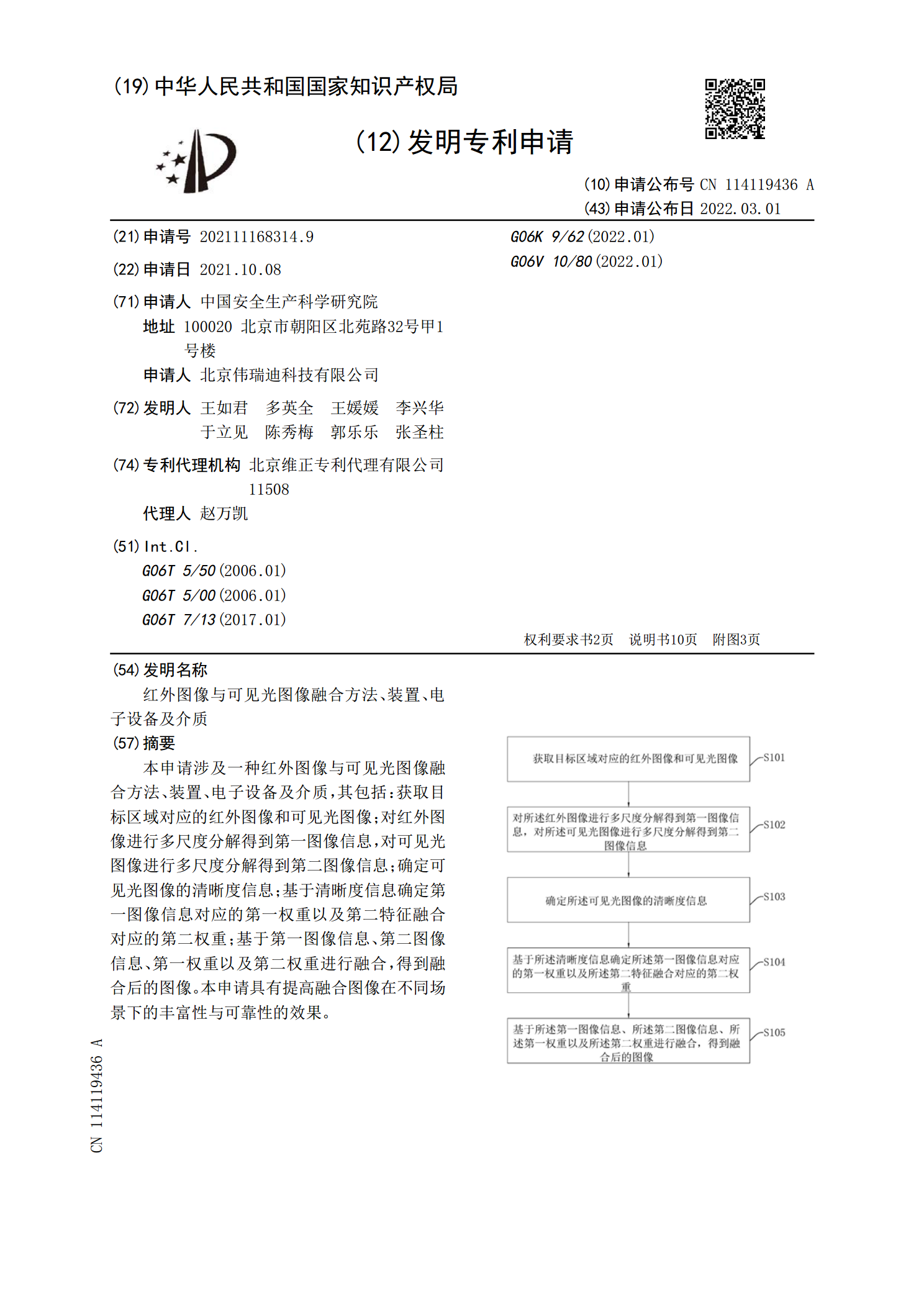
本申请涉及一种红外图像与可见光图像融合方法、装置、电子设备及介质,其包括:获取目标区域对应的红外图像和可见光图像;对红外图像进行多尺度分解得到第一图像信息,对可见光图像进行多尺度分解得到第二图像信息;确定可见光图像的清晰度信息;基于清晰度信息确定第一图像信息对应的第一权重以及第二特征融合对应的第二权重;基于第一图像信息、第二图像信息、第一权重以及第二权重进行融合,得到融合后的图像。本申请具有提高融合图像在不同场景下的丰富性与可靠性的效果。