
一种阵元失效下基于重加权先验的MIMO雷达DOA估计方法.pdf

玄静****写意

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种阵元失效下基于重加权先验的MIMO雷达DOA估计方法.pdf
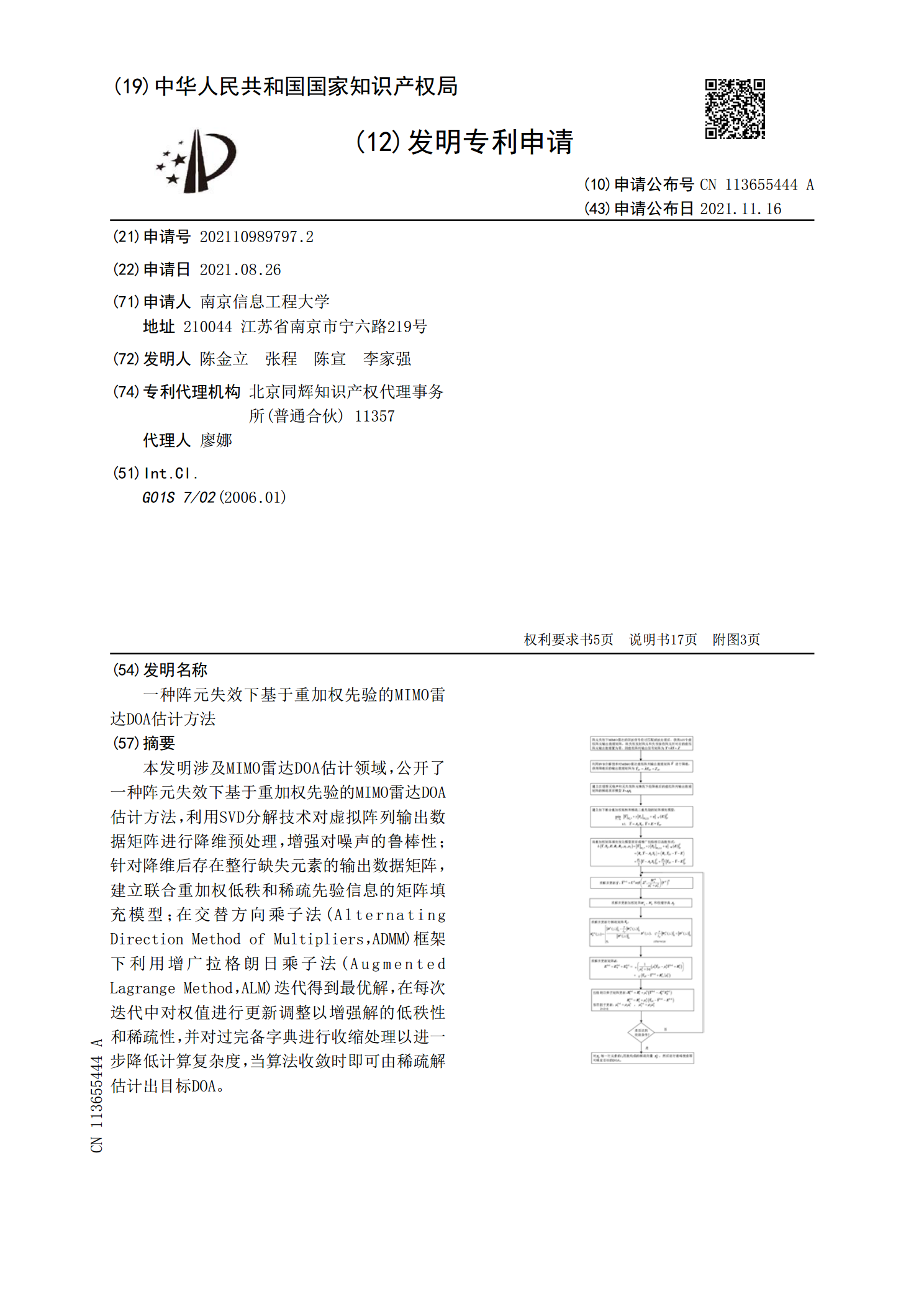
本发明涉及MIMO雷达DOA估计领域,公开了一种阵元失效下基于重加权先验的MIMO雷达DOA估计方法,利用SVD分解技术对虚拟阵列输出数据矩阵进行降维预处理,增强对噪声的鲁棒性;针对降维后存在整行缺失元素的输出数据矩阵,建立联合重加权低秩和稀疏先验信息的矩阵填充模型;在交替方向乘子法(AlternatingDirectionMethodofMultipliers,ADMM)框架下利用增广拉格朗日乘子法(AugmentedLagrangeMethod,ALM)迭代得到最优解,在每次迭代中对权值进
基于ADMM的米波面阵雷达二维DOA估计方法.pdf
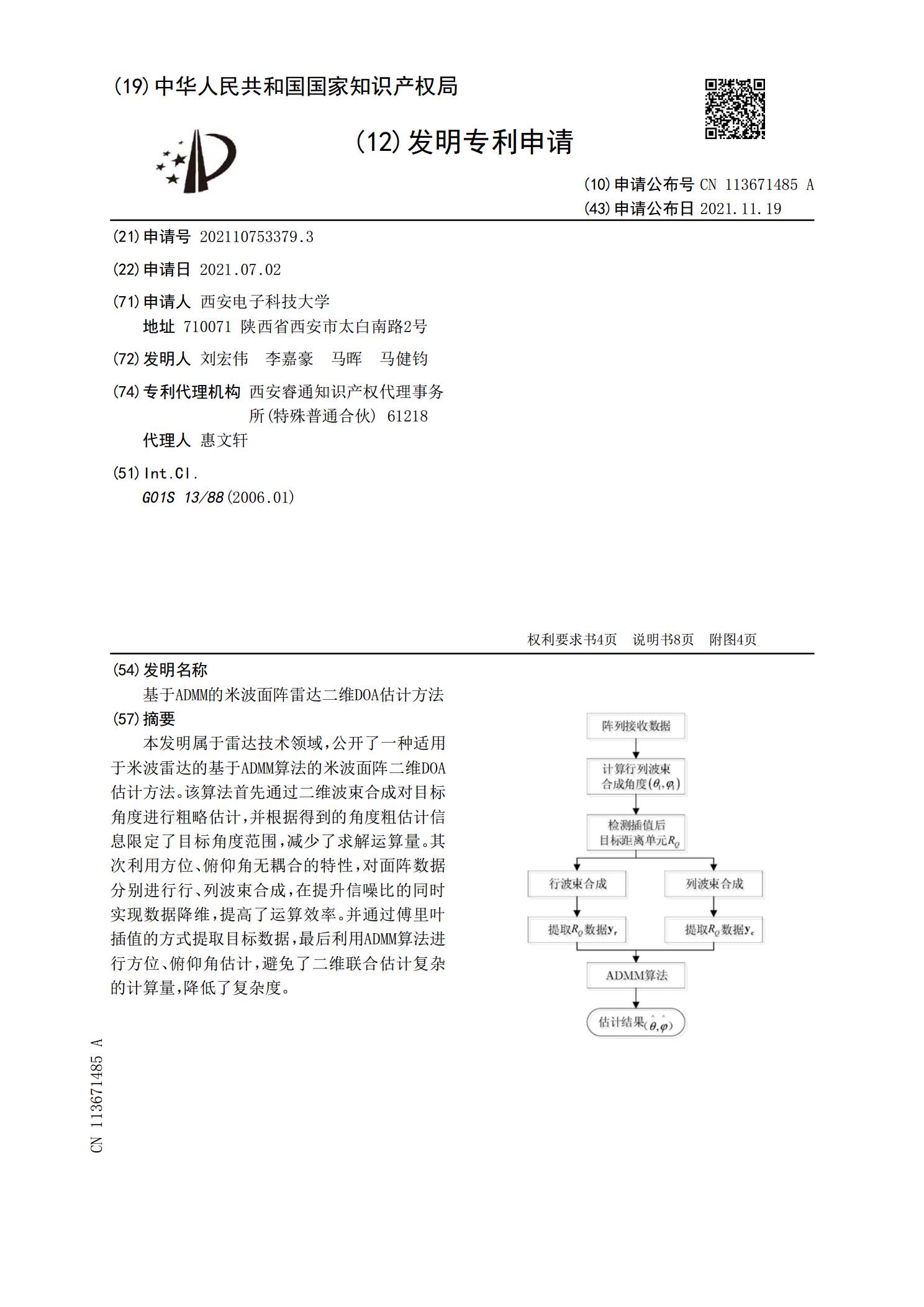
本发明属于雷达技术领域,公开了一种适用于米波雷达的基于ADMM算法的米波面阵二维DOA估计方法。该算法首先通过二维波束合成对目标角度进行粗略估计,并根据得到的角度粗估计信息限定了目标角度范围,减少了求解运算量。其次利用方位、俯仰角无耦合的特性,对面阵数据分别进行行、列波束合成,在提升信噪比的同时实现数据降维,提高了运算效率。并通过傅里叶插值的方式提取目标数据,最后利用ADMM算法进行方位、俯仰角估计,避免了二维联合估计复杂的计算量,降低了复杂度。
一种基于水平线阵的浅海阵列分组加权DOA估计方法.pdf
本发明属于水声信号处理分析领域,公开了一种基于水平线阵的浅海阵列分组加权DOA估计方法,具体为:在浅海波导中发射窄带脉冲声源,信号源经过浅海声道后在接收点得到接收信号,按照不同的阵元间隔对线阵进行拆分,将一组阵列拆为了许多组阵元间隔不同的阵列,分别利用每组阵列上接收到的数据,进行DOA估计,最后按照泰勒级数的方式将阵列对每组阵列估计的结果进行加权,得到最终的DOA估计值。在特征值分解完成后,对噪声子空间进行修正。本方法在阵列数的前提下,充分利用阵列数据,显著提高了DOA估计的精度。
一种基于压缩感知的灵活MIMO雷达混合目标DOA估计方法.pdf
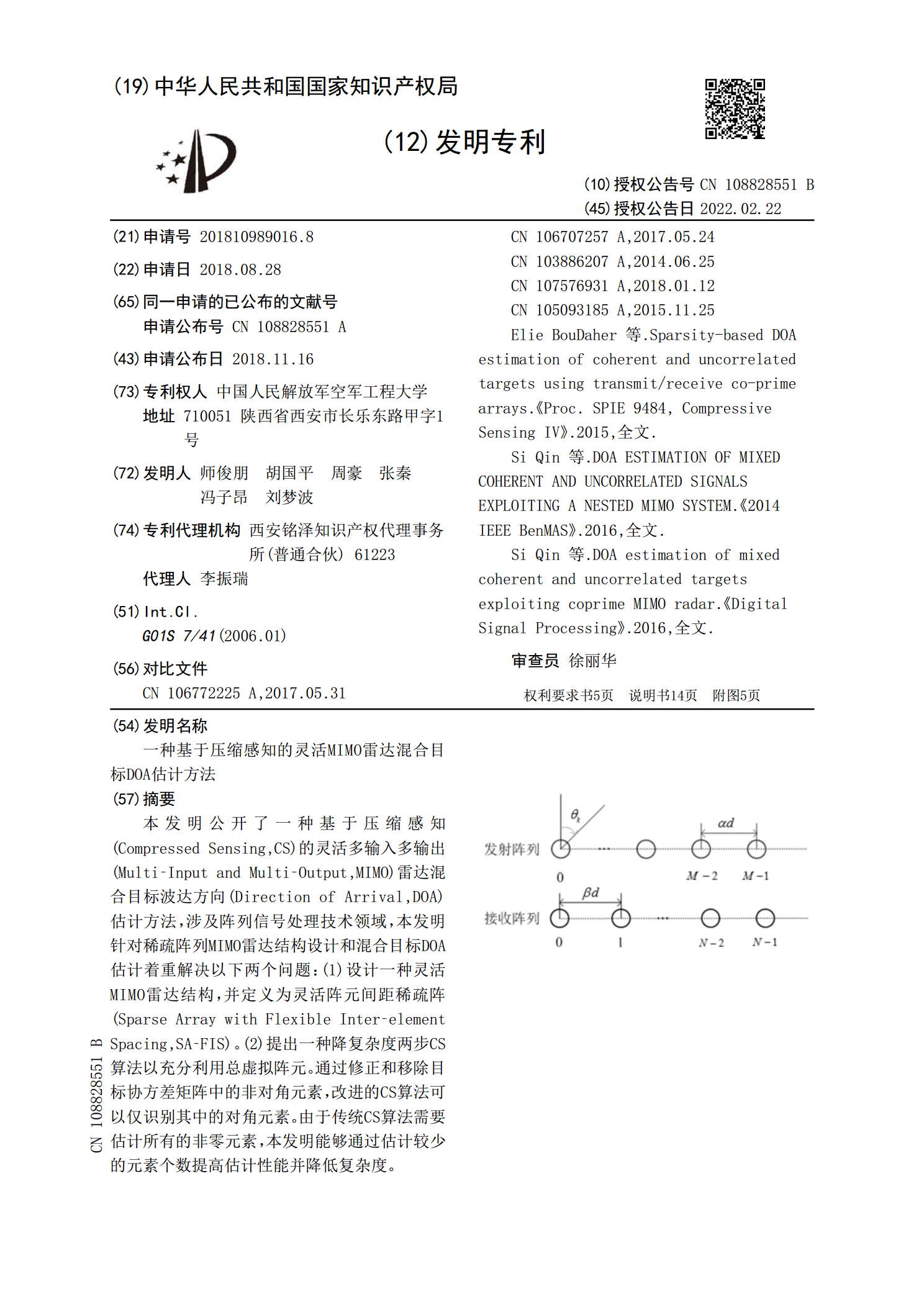
本发明公开了一种基于压缩感知(CompressedSensing,CS)的灵活多输入多输出(Multi?InputandMulti?Output,MIMO)雷达混合目标波达方向(DirectionofArrival,DOA)估计方法,涉及阵列信号处理技术领域,本发明针对稀疏阵列MIMO雷达结构设计和混合目标DOA估计着重解决以下两个问题:(1)设计一种灵活MIMO雷达结构,并定义为灵活阵元间距稀疏阵(SparseArraywithFlexibleInter?elementSpacing,SA?FIS)。(
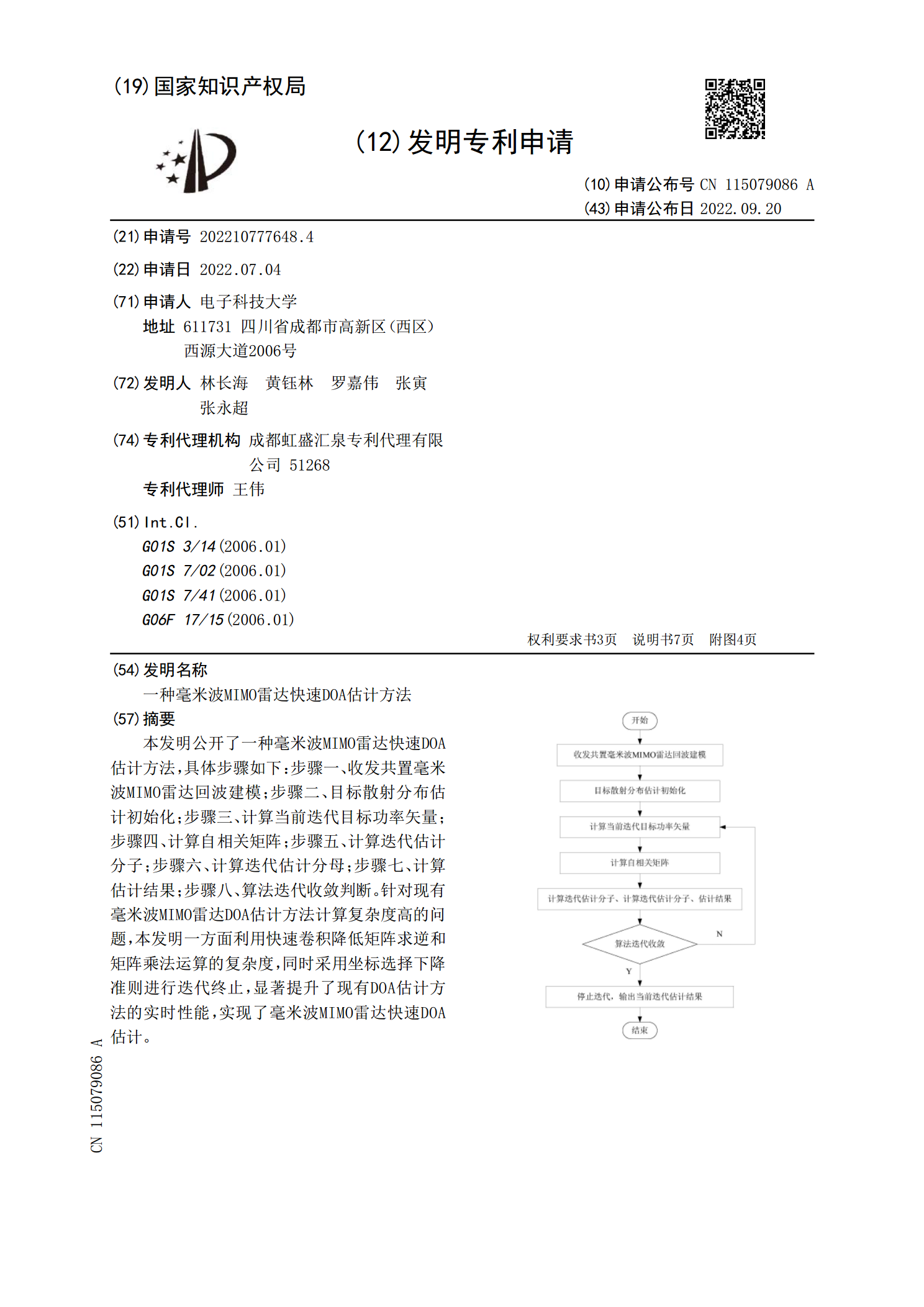
一种毫米波MIMO雷达快速DOA估计方法.pdf
本发明公开了一种毫米波MIMO雷达快速DOA估计方法,具体步骤如下:步骤一、收发共置毫米波MIMO雷达回波建模;步骤二、目标散射分布估计初始化;步骤三、计算当前迭代目标功率矢量;步骤四、计算自相关矩阵;步骤五、计算迭代估计分子;步骤六、计算迭代估计分母;步骤七、计算估计结果;步骤八、算法迭代收敛判断。针对现有毫米波MIMO雷达DOA估计方法计算复杂度高的问题,本发明一方面利用快速卷积降低矩阵求逆和矩阵乘法运算的复杂度,同时采用坐标选择下降准则进行迭代终止,显著提升了现有DOA估计方法的实时性能,实现了毫米