
控制装置及方法、系统、存储介质.pdf

一吃****新冬


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
控制装置及方法、系统、存储介质.pdf
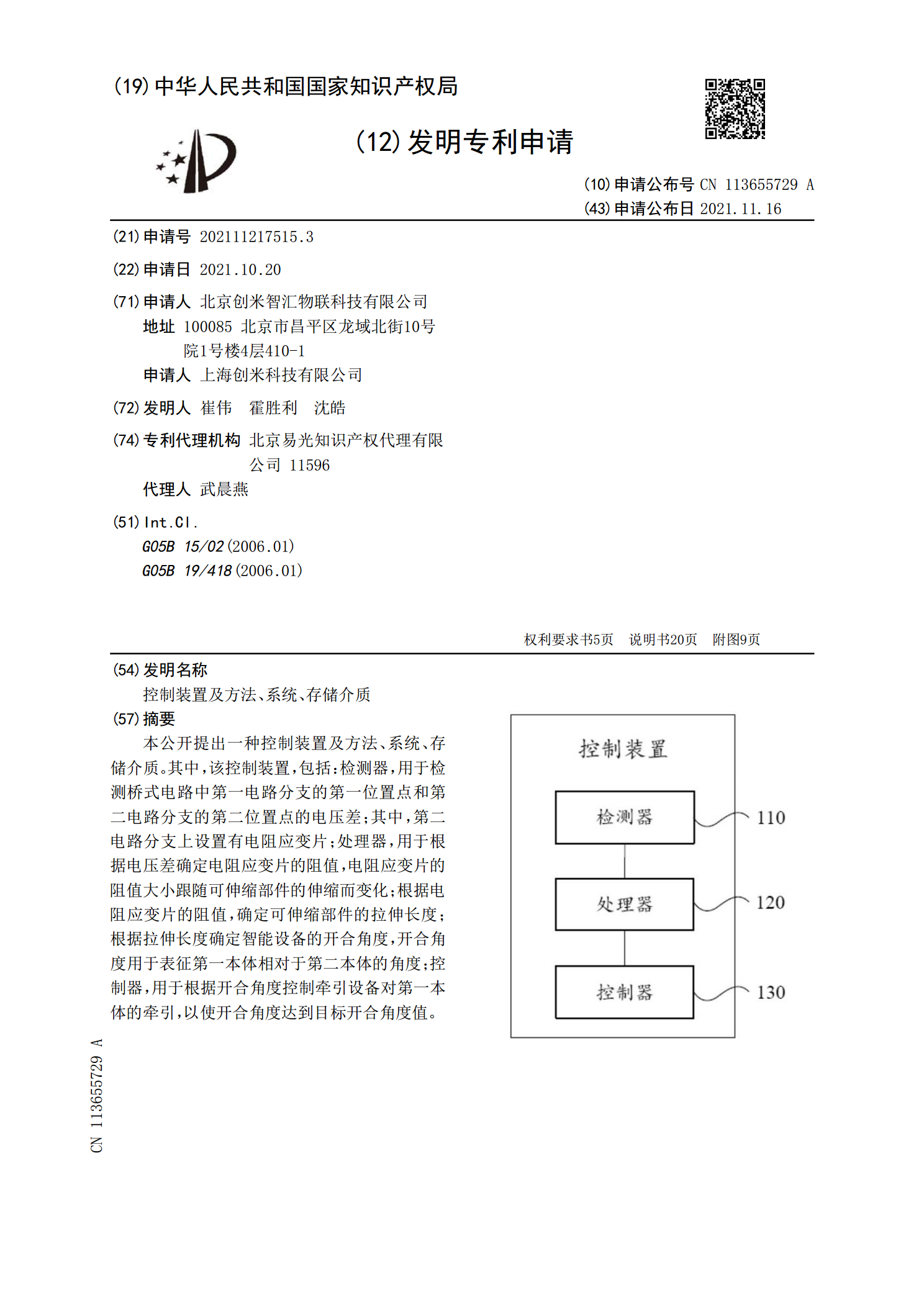
本公开提出一种控制装置及方法、系统、存储介质。其中,该控制装置,包括:检测器,用于检测桥式电路中第一电路分支的第一位置点和第二电路分支的第二位置点的电压差;其中,第二电路分支上设置有电阻应变片;处理器,用于根据电压差确定电阻应变片的阻值,电阻应变片的阻值大小跟随可伸缩部件的伸缩而变化;根据电阻应变片的阻值,确定可伸缩部件的拉伸长度;根据拉伸长度确定智能设备的开合角度,开合角度用于表征第一本体相对于第二本体的角度;控制器,用于根据开合角度控制牵引设备对第一本体的牵引,以使开合角度达到目标开合角度值。
控制方法、装置、系统及存储介质.pdf
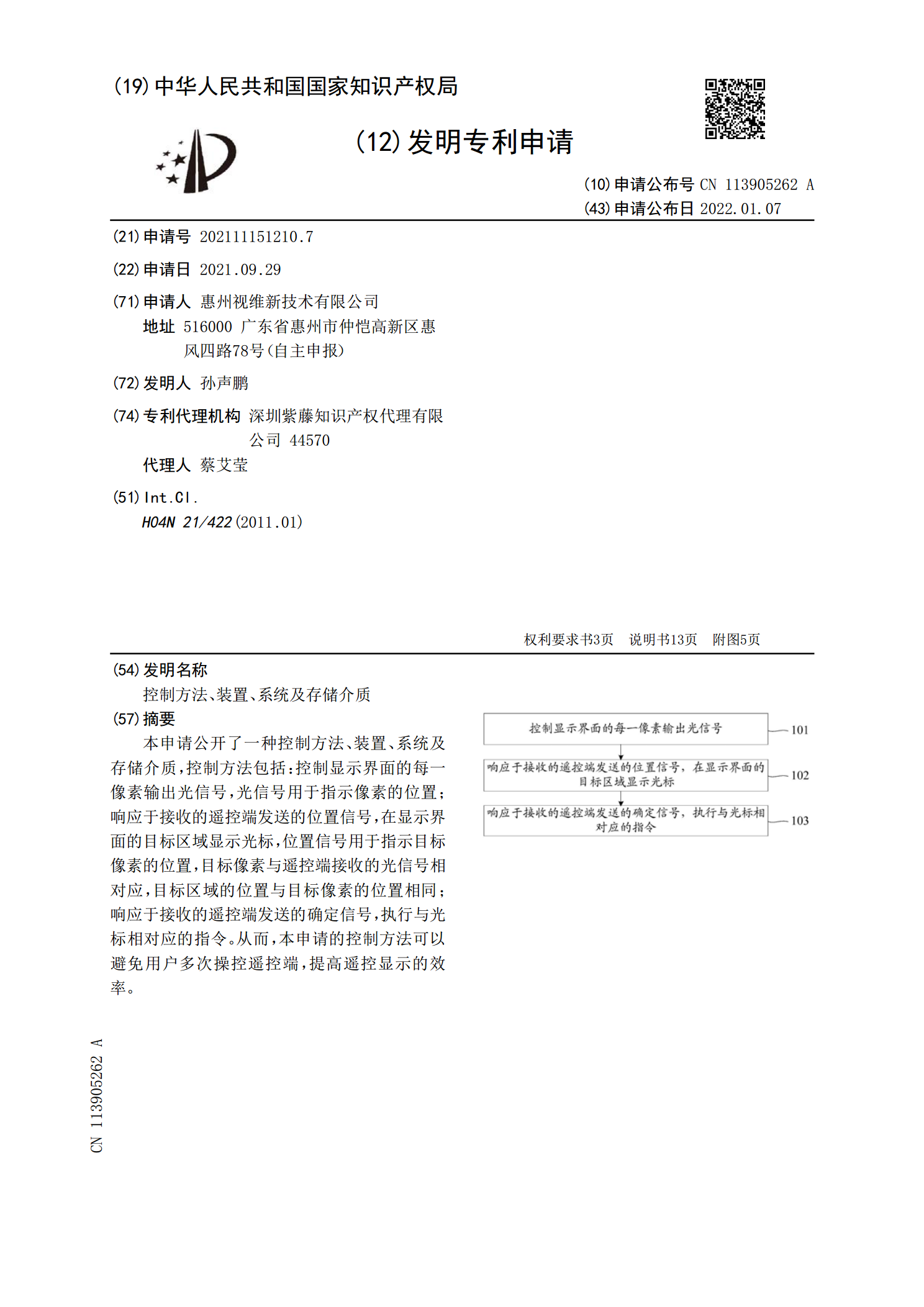
本申请公开了一种控制方法、装置、系统及存储介质,控制方法包括:控制显示界面的每一像素输出光信号,光信号用于指示像素的位置;响应于接收的遥控端发送的位置信号,在显示界面的目标区域显示光标,位置信号用于指示目标像素的位置,目标像素与遥控端接收的光信号相对应,目标区域的位置与目标像素的位置相同;响应于接收的遥控端发送的确定信号,执行与光标相对应的指令。从而,本申请的控制方法可以避免用户多次操控遥控端,提高遥控显示的效率。

控制方法和装置、系统及存储介质.pdf
本发明实施例提供一种控制方法和装置、系统及存储介质。控制装置包括:壳体、用户输入组件、遥控信号组件、处理单元、无线通信模块和设备识别组件,用户输入组件设置于壳体上并用于输入控制指令,遥控信号组件设置于壳体内并用于发射或接收控制信息,处理单元分别和用户输入组件以及遥控信号组件电连接,无线通信模块和处理单元电连接,设备识别组件包括摄像头,摄像头设置在壳体的前端,且摄像头和处理单元电连接,摄像头用于采集待控制设备的图像信息,处理单元被配置为根据图像信息获取待控制设备的设备类型,根据预先存储的设备类型和控制信息之
设备控制方法、系统、装置及存储介质.pdf
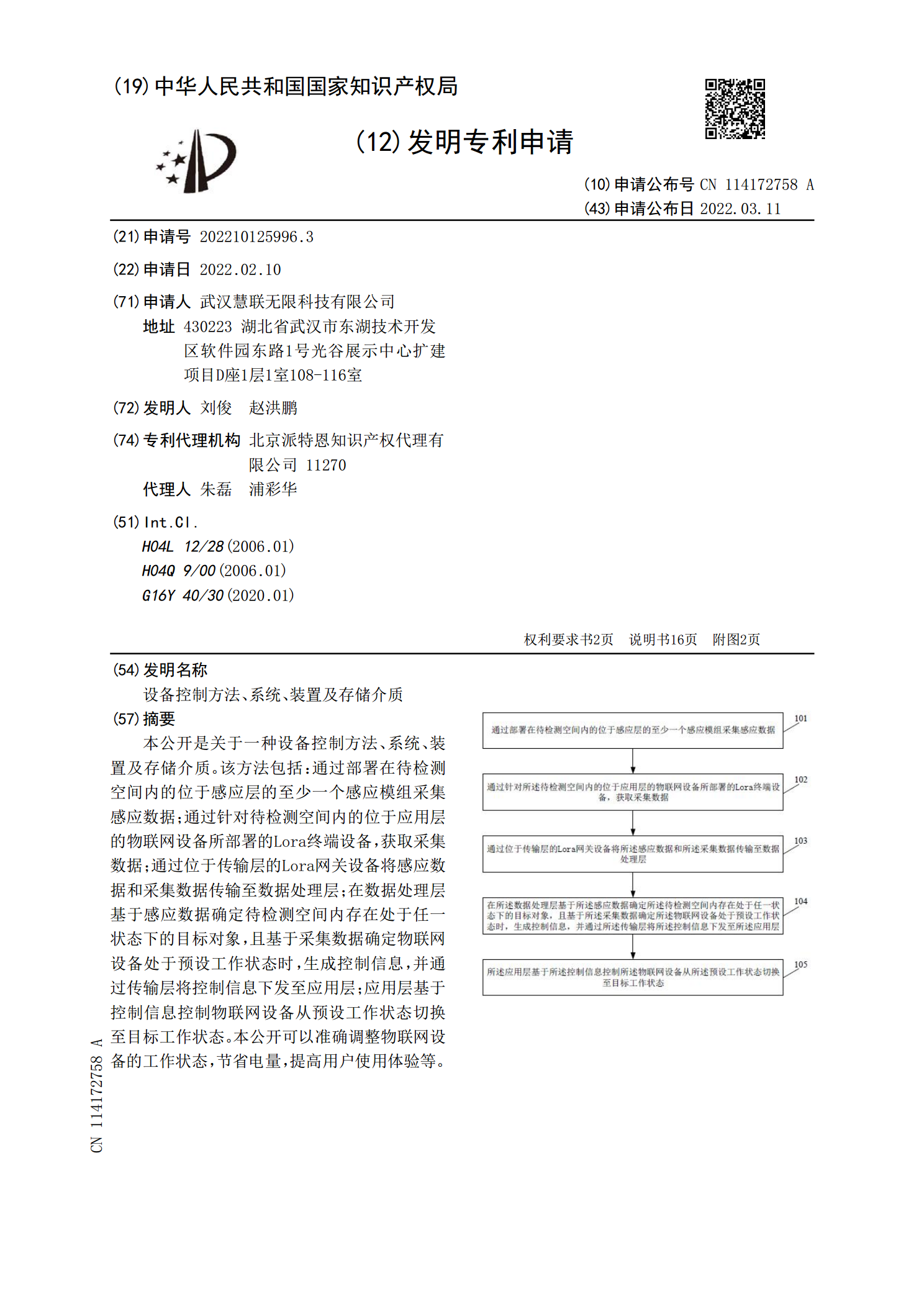
本公开是关于一种设备控制方法、系统、装置及存储介质。该方法包括:通过部署在待检测空间内的位于感应层的至少一个感应模组采集感应数据;通过针对待检测空间内的位于应用层的物联网设备所部署的Lora终端设备,获取采集数据;通过位于传输层的Lora网关设备将感应数据和采集数据传输至数据处理层;在数据处理层基于感应数据确定待检测空间内存在处于任一状态下的目标对象,且基于采集数据确定物联网设备处于预设工作状态时,生成控制信息,并通过传输层将控制信息下发至应用层;应用层基于控制信息控制物联网设备从预设工作状态切换至目标工
组装控制方法、装置、系统及存储介质.pdf
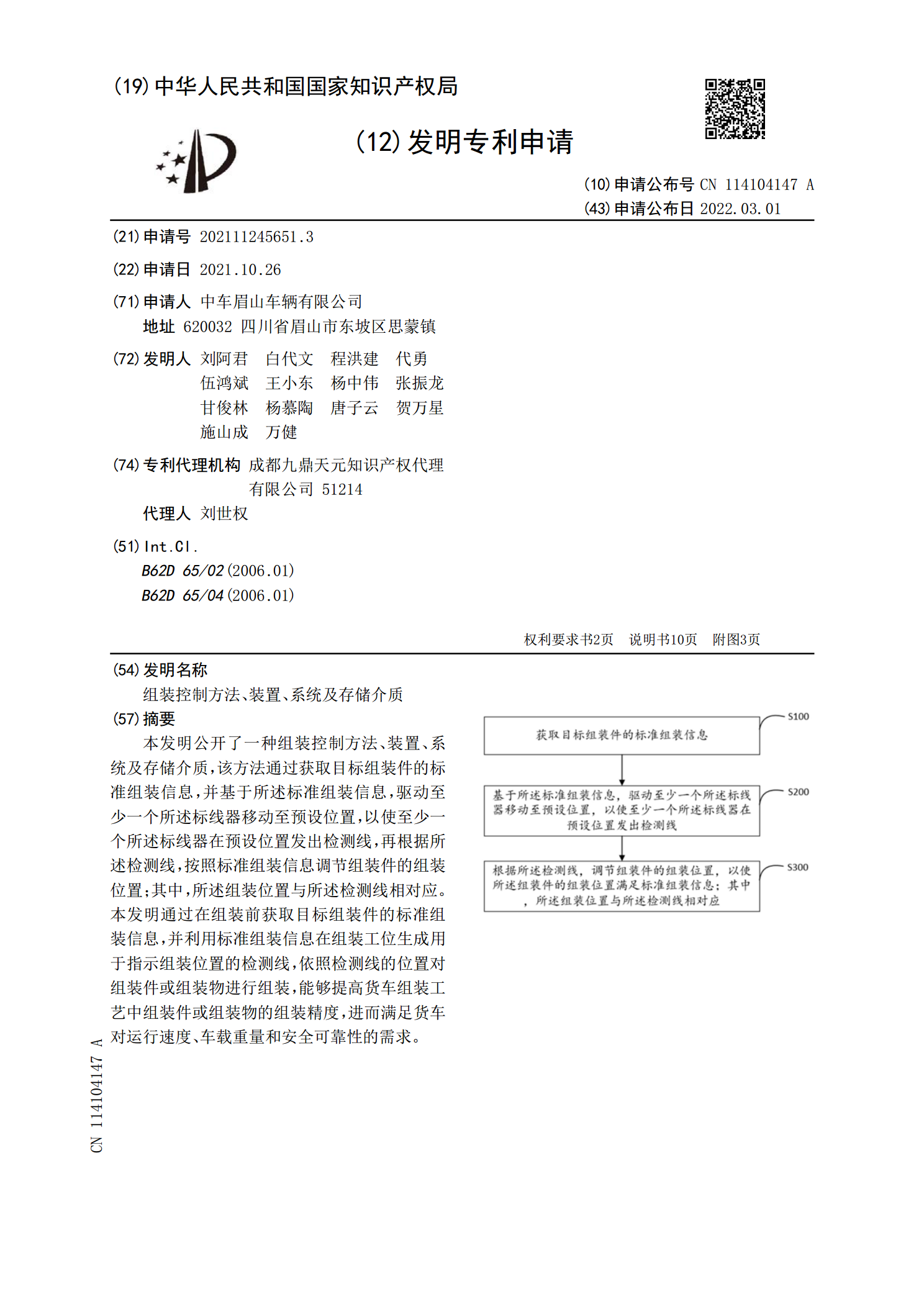
本发明公开了一种组装控制方法、装置、系统及存储介质,该方法通过获取目标组装件的标准组装信息,并基于所述标准组装信息,驱动至少一个所述标线器移动至预设位置,以使至少一个所述标线器在预设位置发出检测线,再根据所述检测线,按照标准组装信息调节组装件的组装位置;其中,所述组装位置与所述检测线相对应。本发明通过在组装前获取目标组装件的标准组装信息,并利用标准组装信息在组装工位生成用于指示组装位置的检测线,依照检测线的位置对组装件或组装物进行组装,能够提高货车组装工艺中组装件或组装物的组装精度,进而满足货车对运行速度