
基于原子范数最小化可降维的二维离格DOA估计方法.pdf

Jo****34

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于原子范数最小化可降维的二维离格DOA估计方法.pdf
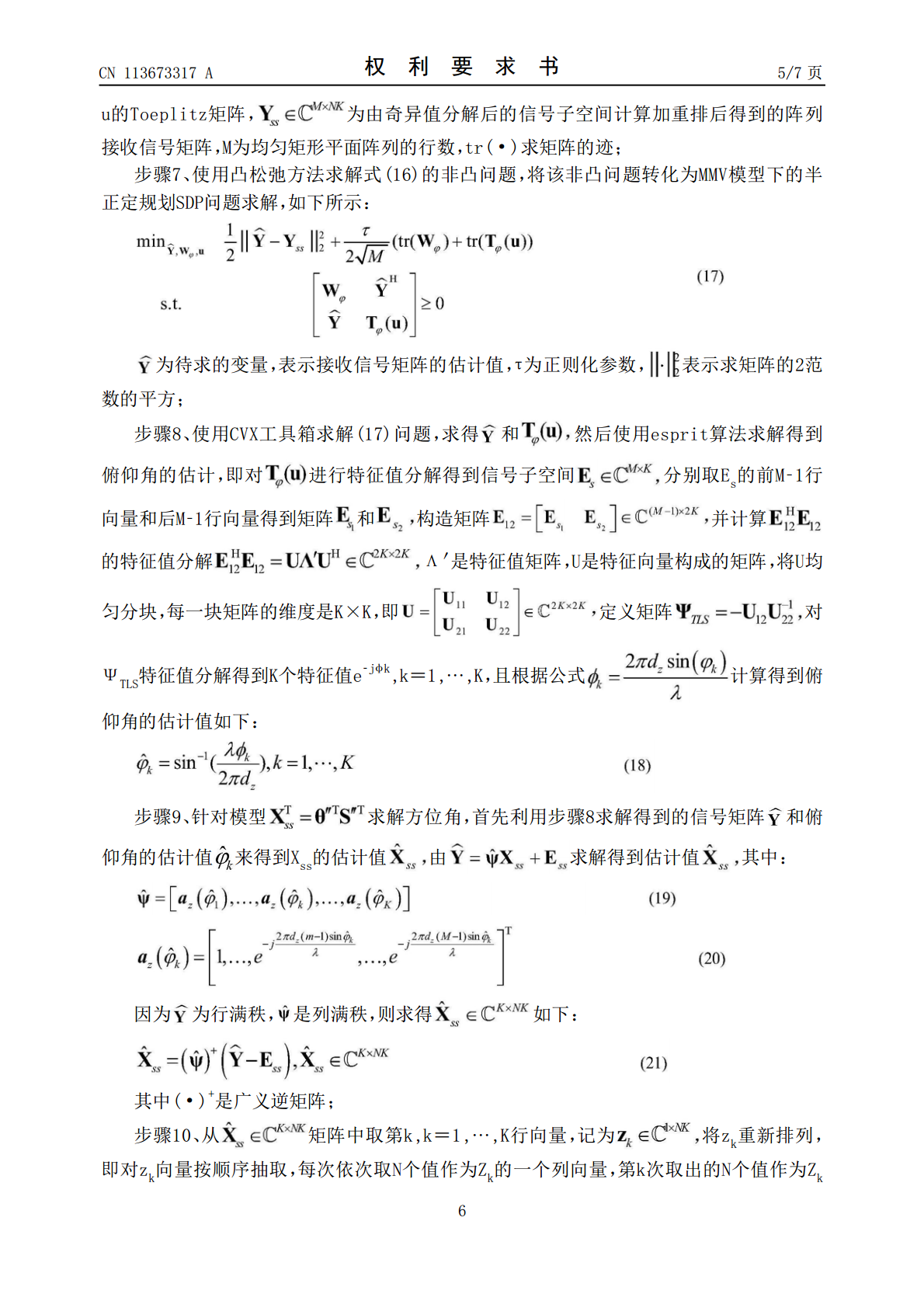
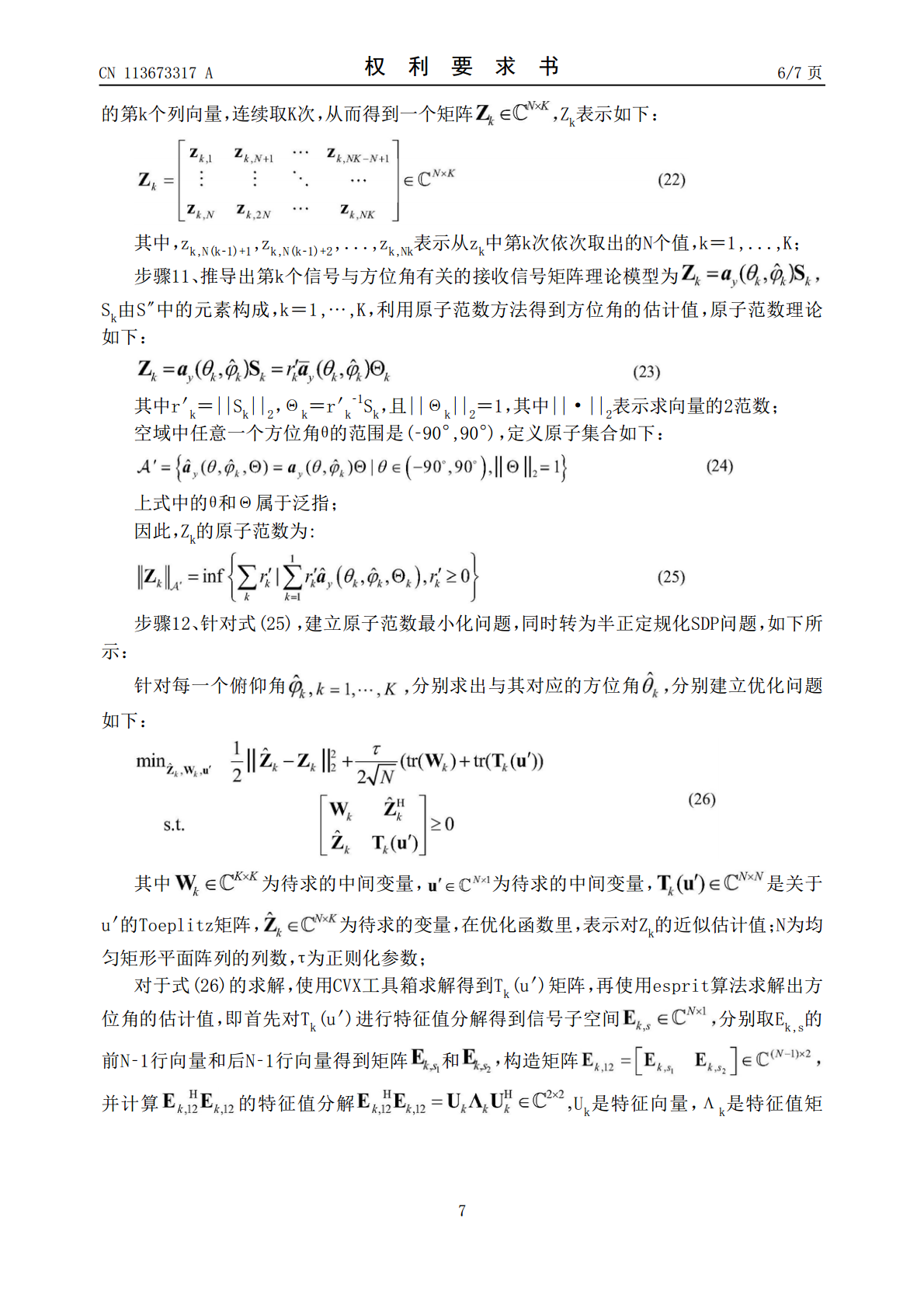
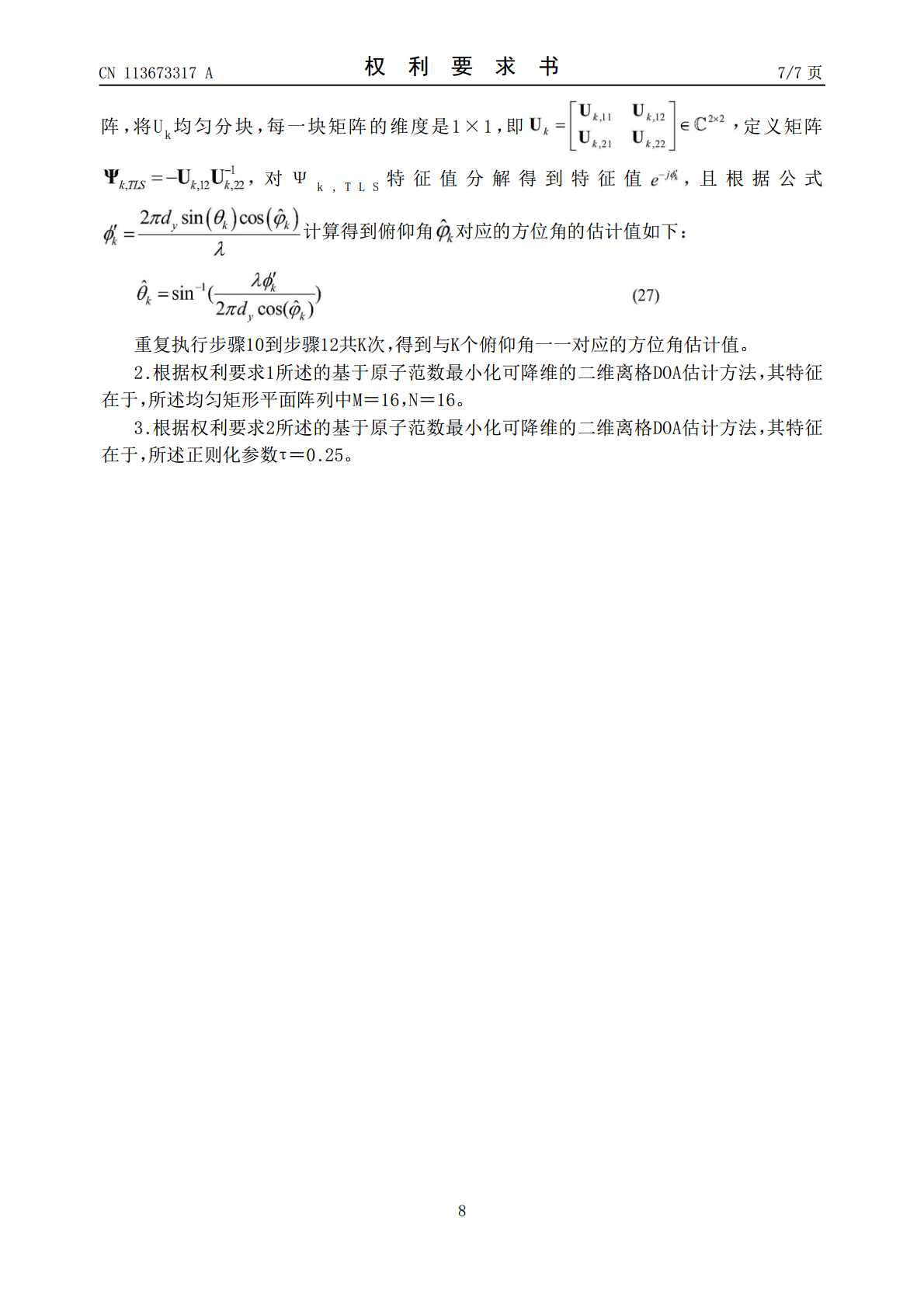
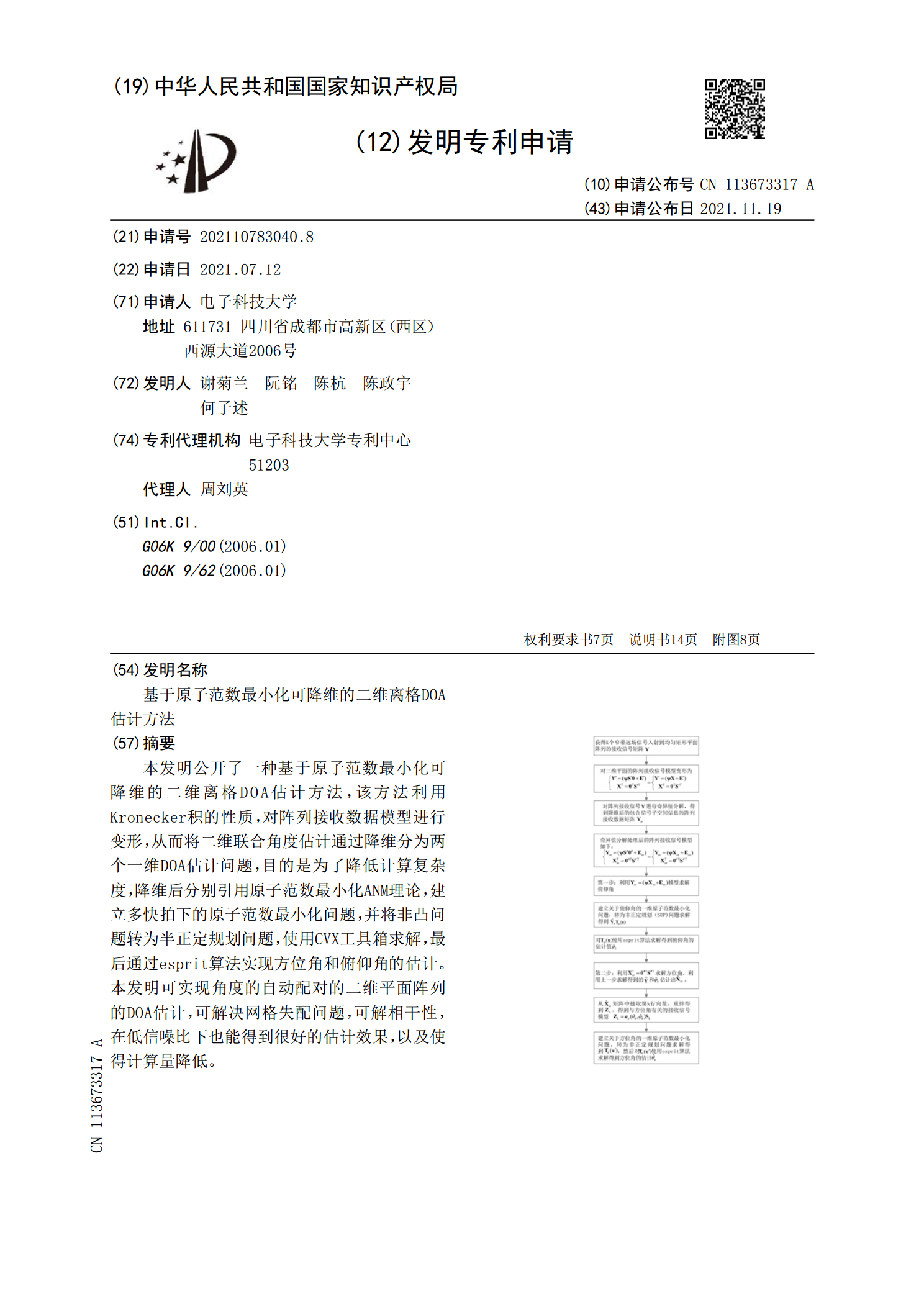
本发明公开了一种基于原子范数最小化可降维的二维离格DOA估计方法,该方法利用Kronecker积的性质,对阵列接收数据模型进行变形,从而将二维联合角度估计通过降维分为两个一维DOA估计问题,目的是为了降低计算复杂度,降维后分别引用原子范数最小化ANM理论,建立多快拍下的原子范数最小化问题,并将非凸问题转为半正定规划问题,使用CVX工具箱求解,最后通过esprit算法实现方位角和俯仰角的估计。本发明可实现角度的自动配对的二维平面阵列的DOA估计,可解决网格失配问题,可解相干性,在低信噪比下也能得到很好的估计
一种基于原子范数最小化的二维鲁棒自适应波束形成方法.pdf
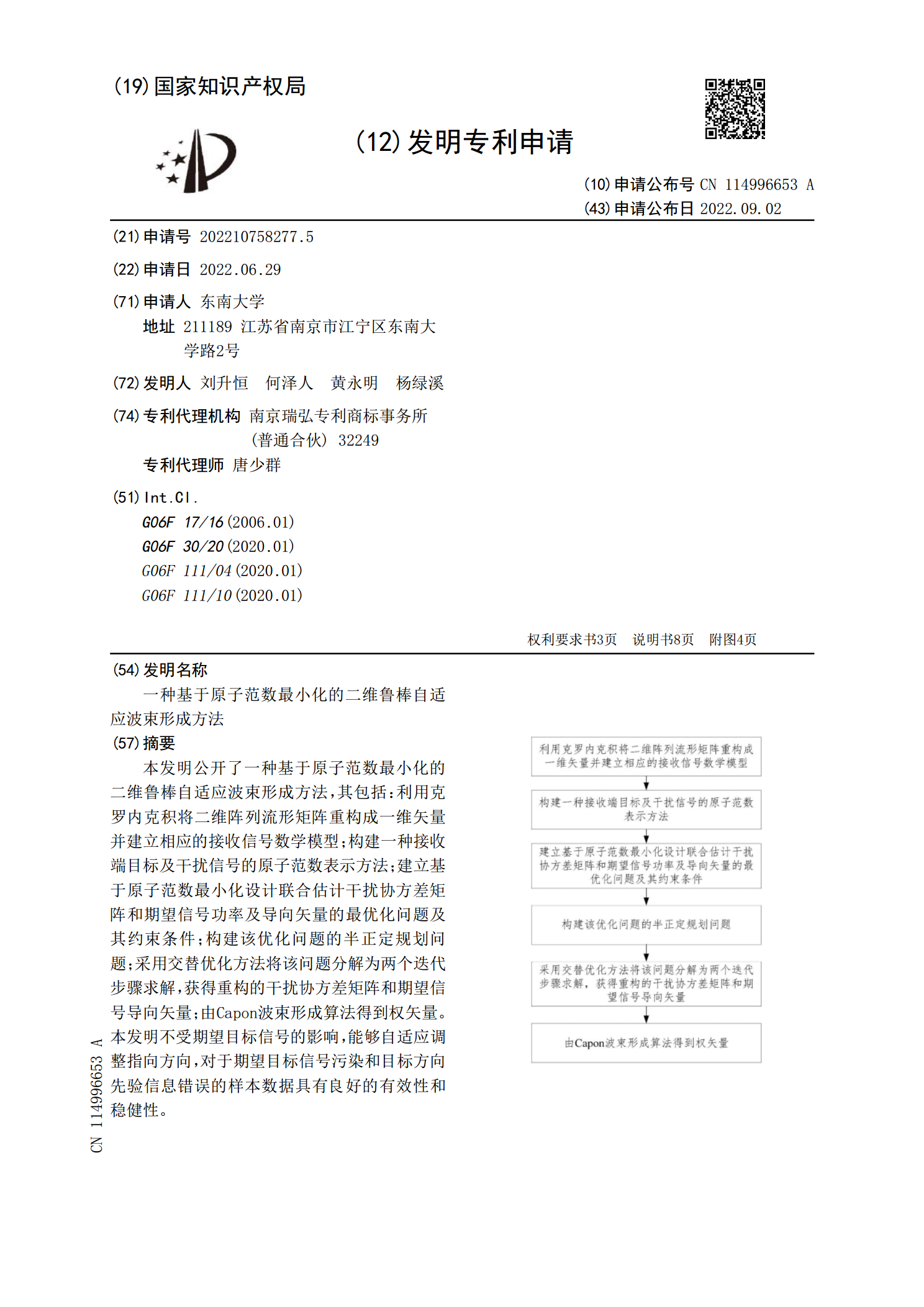
本发明公开了一种基于原子范数最小化的二维鲁棒自适应波束形成方法,其包括:利用克罗内克积将二维阵列流形矩阵重构成一维矢量并建立相应的接收信号数学模型;构建一种接收端目标及干扰信号的原子范数表示方法;建立基于原子范数最小化设计联合估计干扰协方差矩阵和期望信号功率及导向矢量的最优化问题及其约束条件;构建该优化问题的半正定规划问题;采用交替优化方法将该问题分解为两个迭代步骤求解,获得重构的干扰协方差矩阵和期望信号导向矢量;由Capon波束形成算法得到权矢量。本发明不受期望目标信号的影响,能够自适应调整指向方向,对

基于感知压缩的二维DOA估计方法、装置及介质.pdf
本申请提出了一种基于感知压缩的二维DOA估计方法、装置及介质,在获得均匀面阵中各阵元所接收到的回波信号后,对同一方向的阵元接收到的回波信号进行一维数字波束形成DBF操作,分别对得到的不同方向的一维DBF结果进行功率谱峰值搜索,获得目标的初始角度集,再利用预设的角度分辨率,对初始角度集进行扩展,得到目标角度集,降低OMP操作中的原子数,这样,针对目标角度集,利用OMP算法对调整后的一维回波信号进行稀疏向量重构,再至少依据重构的稀疏向量,可以快速且准确获得目标方位角和目标仰俯角,降低了计算量,满足了应用场景的
基于ADMM的米波面阵雷达二维DOA估计方法.pdf
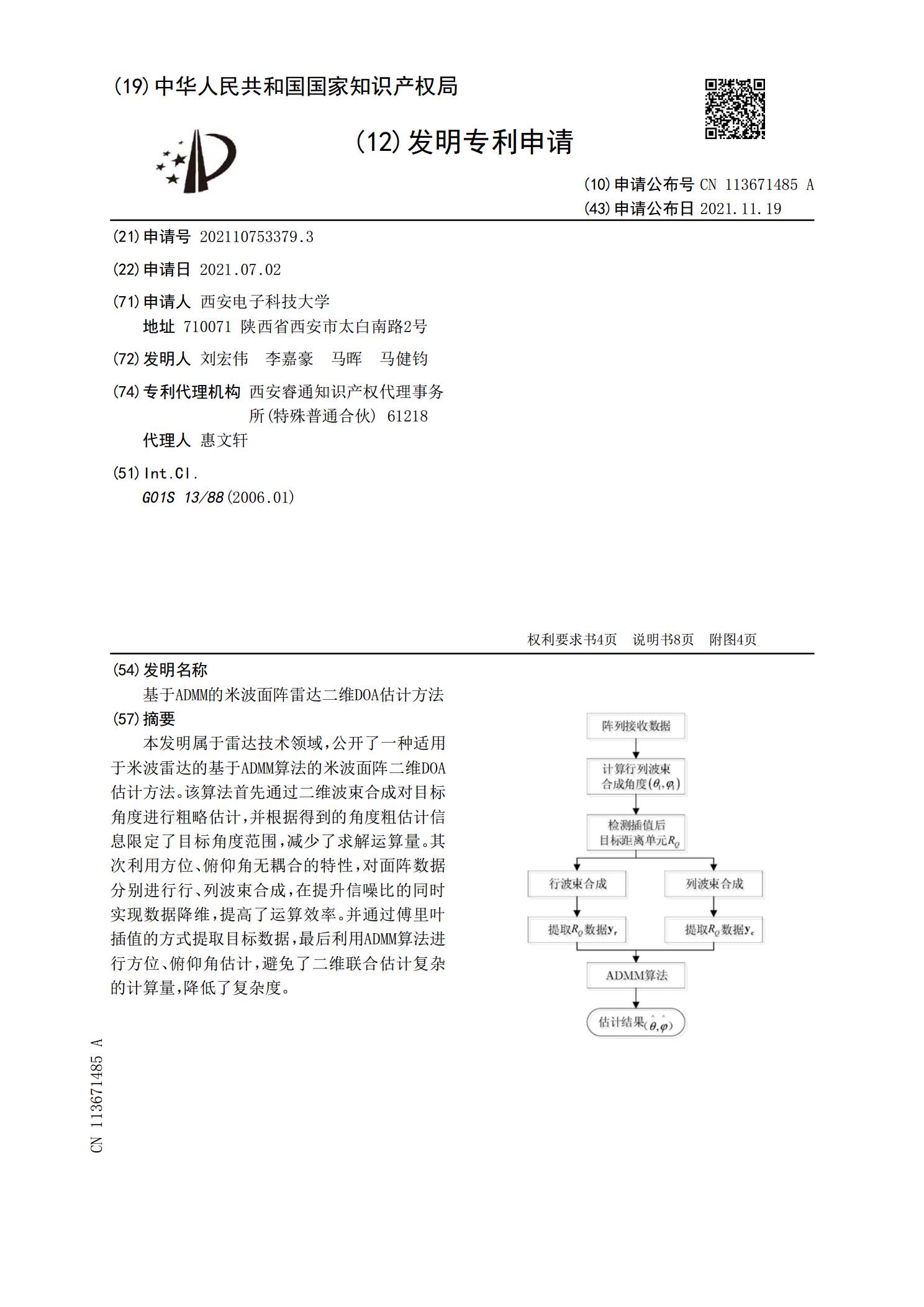
本发明属于雷达技术领域,公开了一种适用于米波雷达的基于ADMM算法的米波面阵二维DOA估计方法。该算法首先通过二维波束合成对目标角度进行粗略估计,并根据得到的角度粗估计信息限定了目标角度范围,减少了求解运算量。其次利用方位、俯仰角无耦合的特性,对面阵数据分别进行行、列波束合成,在提升信噪比的同时实现数据降维,提高了运算效率。并通过傅里叶插值的方式提取目标数据,最后利用ADMM算法进行方位、俯仰角估计,避免了二维联合估计复杂的计算量,降低了复杂度。

基于MUSIC和OMP的二维DOA估计方法、装置及介质.pdf
本申请提出了一种基于MUSIC和OMP的二维DOA估计方法、装置及介质,在确定二维均匀或非均匀矩形阵列中各阵元接收到的单快拍的回波数据后,将采用分维度MUSIC算法,直接使用依据一方向阵元结构确定的快拍数据,对另一方向阵元的回波数据进行一维MUSIC操作,获得不同目标的中间角集和仰俯角集,无需使用空间平滑算法,在不损失阵列孔径的前提下,实现了角度精准估计,之后,依据OMP算法对中间角集和仰俯角集各自包含的角度进行匹配处理,相对于二维谱峰搜索方式,大大降低了计算量,满足了多种应用场景的实时性需求。