
基于双目视觉图像的三维地形重建方法、装置及存储介质.pdf

曾琪****是我

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目视觉图像的三维地形重建方法、装置及存储介质.pdf
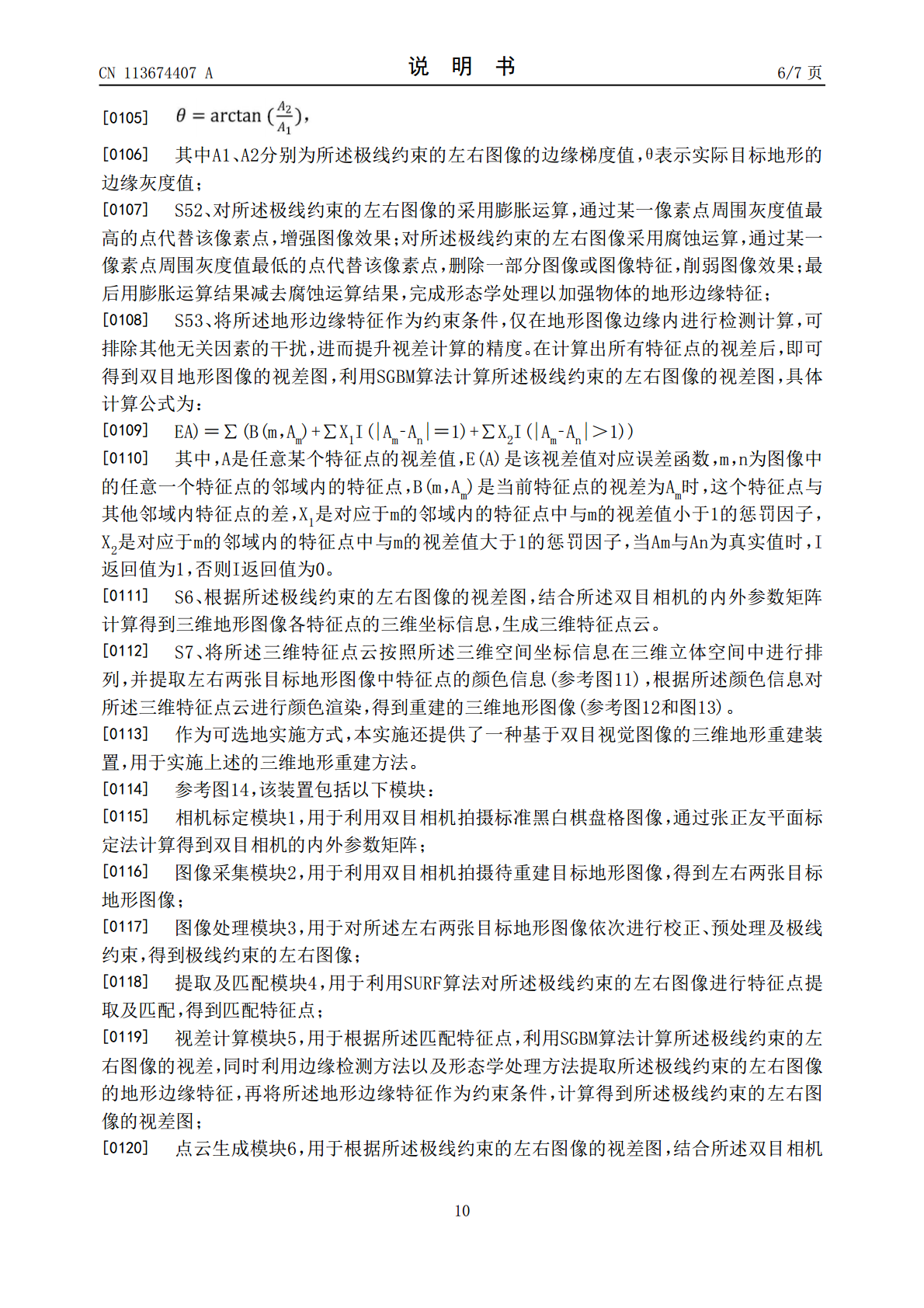
本发明公开了一种基于双目视觉图像的三维地形重建方法、装置及存储介质,恢复了地形表面三维信息并实现了高精度高效率的三维地形重建。仅使用两个相机模拟人类视觉系统,首先拍摄棋盘格以获取相机内外参数矩阵;随后拍摄地形图像并对其进行预处理与校正;然后使用改进的特征点提取及匹配算法以匹配双目地形图像的特征点;其次利用改进的视差图生成算法结合匹配的特征点以获取目标地形的视差图;最后结合相机内外参数进行点云拼接以及点云颜色渲染即可完成地形的三维重建。与现有三维重建方法相比,本发明提出的方法能在很大程度上提升三维地形重建精

基于双目视觉的地形三维重建.docx
基于双目视觉的地形三维重建摘要:本文主要研究了基于双目视觉的地形三维重建方法。首先介绍了双目视觉原理和相关技术,然后详细阐述了基于双目视觉的地形三维重建流程,包括图像预处理、特征提取、匹配、三维重建等环节。最后,通过实验验证了该方法的可行性和有效性。关键词:双目视觉;地形三维重建;图像预处理;特征提取;匹配;三维重建1.Introduction在电子地图、虚拟现实、自动驾驶等应用领域,对于地形的三维建模和重建有着重要的作用。传统的地形建模方法主要基于激光扫描、摄影测量等技术,但这些方法成本高、时间长、对设
基于双目视觉的体积测量方法、装置及存储介质.pdf
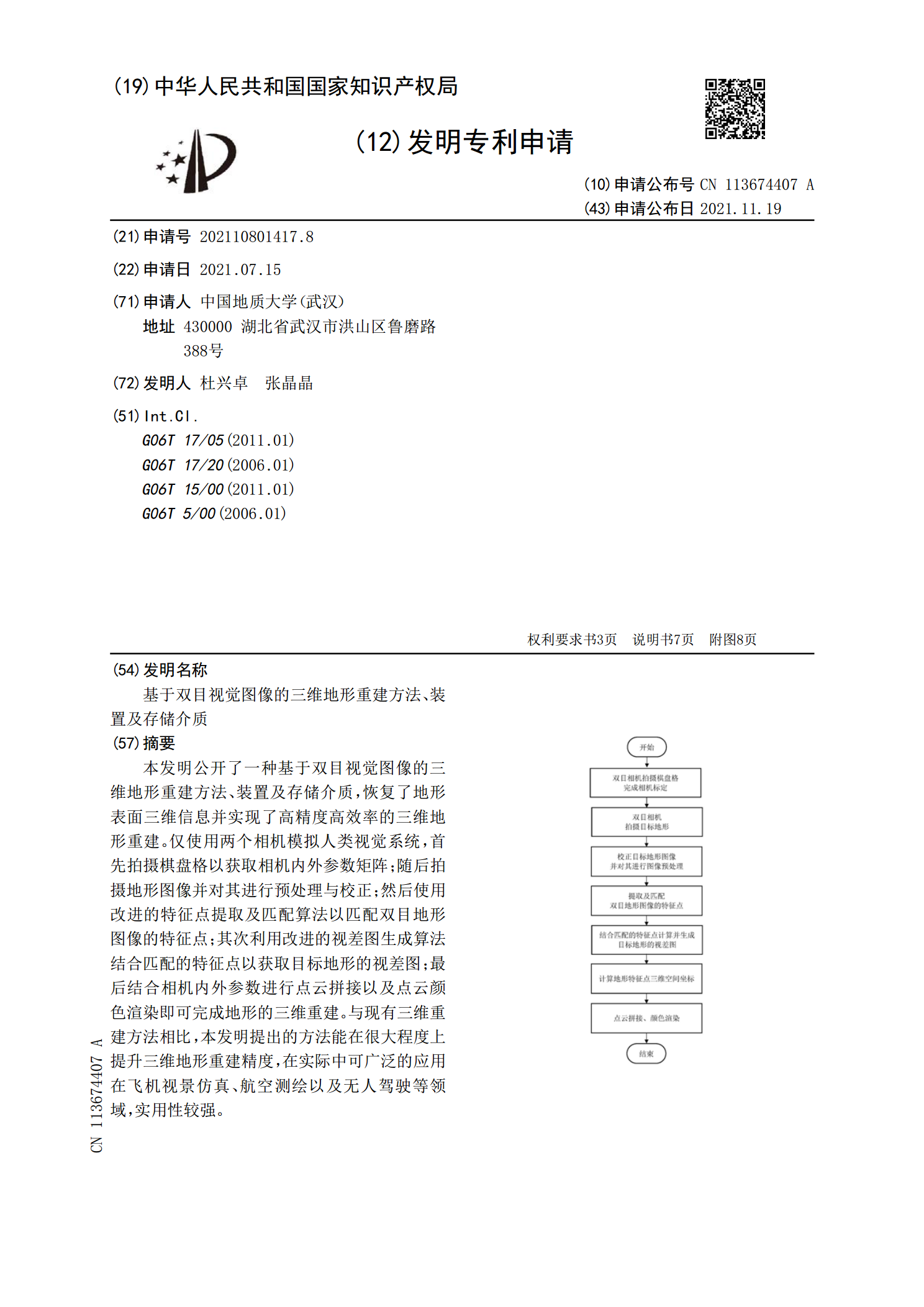
本申请提出一种基于双目视觉的体积测量方法、装置及存储介质,其中,方法包括:获取双目相机拍摄到的货物的第一货物图像和第二货物图像;根据第一货物图像和第二货物图像,获取货物的深度图;根据货物的深度图和双目相机的位置关系,确定货物的深度信息;根据深度图中货物顶面每个点的法向量,确定货物顶面的外包络;基于外包络轮廓,利用最小二乘法拟合得到货物顶面的最小边框,确定货物的长度和宽度;根据货物的长度和宽度以及深度信息,确定货物的体积。通过本方法,能够准确得到货物的长度、宽度以及高度,从而提高体积测量的准确度,减小体积测

基于双目视觉的图像三维重建的中期报告.docx
基于双目视觉的图像三维重建的中期报告一、选题意义随着机器视觉技术的发展,图像三维重建已成为一个热门的研究领域。图像三维重建可以通过使用多个视角的图像数据创建立体三维模型,了解物体的三维结构和场景,对虚拟现实、工业制造、医疗诊断等领域都有广泛的应用。本项目基于双目视觉技术,针对单个目标物体进行三维重建,实现对物体的实时测距、立体视觉效果等功能。同时,本项目还将探索如何利用深度学习优化双目视觉算法以提高图像三维重建质量和效率。二、研究内容1.双目立体视觉原理双目立体视觉是指通过两个单独成像的摄像机获取的两个或

图像重建方法、装置、设备及存储介质.pdf
本申请属于数字图像处理领域,具体涉及一种图像重建方法、装置、设备及存储介质,其包括:获取预先训练的图像重建模型,图像重建模型中的第一网络分支用于基于第一图像数据生成初始重建图像;第二网络分支用于从第二图像数据中提取色彩矫正系数;输出层用于使用色彩矫正系数对初始重建图像进行调整;将第一图像数据和第二图像数据输入图像重建模型,得到重建图像;可以解决传统的图像重建模型不能恢复出在宽动态场景中暗区或者亮区采集的图像数据,导致图像重建效果不佳的问题;使用图像传感器采集到第一图像数据重建图像,可以保证重建图像不丧失明