
一种基于毫米波雷达的3D多目标跟踪处理方法.pdf

是你****晨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于毫米波雷达的3D多目标跟踪处理方法.pdf
本发明属于雷达信号处理技术领域,公开了一种基于毫米波雷达的3D多目标跟踪处理方法,先通过毫米波雷达基带信号处理得到空间上多目标的点迹,选取信噪比较强的点迹绘制成3D点云图,根据点云图进行后续的聚类和跟踪的处理;聚类处理的输入是多个3D点云,具有空间三维方向的信息,遍历搜索距离位置邻近且同一类别的点迹,通过同一类的标记得到同类的点迹即为聚类得到的结果,确定该一类点迹的空间位置等参数后输入轨迹跟踪中,进行轨迹算法的点迹关联和点迹管理,得到每一帧的点迹的轨迹,跟踪目标并且标记该目标的ID号。可以实现在复杂的环境
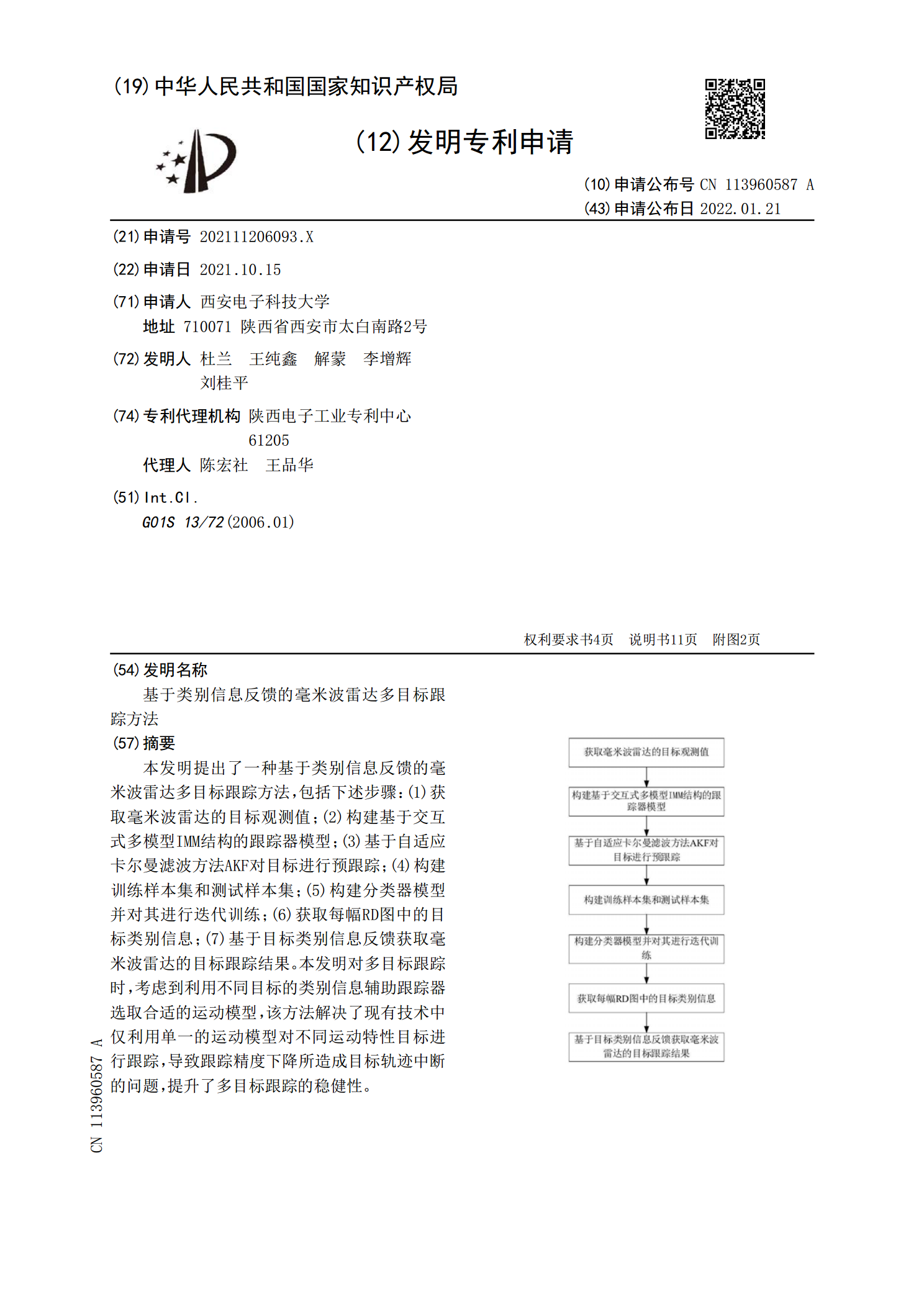
基于类别信息反馈的毫米波雷达多目标跟踪方法.pdf
本发明提出了一种基于类别信息反馈的毫米波雷达多目标跟踪方法,包括下述步骤:(1)获取毫米波雷达的目标观测值;(2)构建基于交互式多模型IMM结构的跟踪器模型;(3)基于自适应卡尔曼滤波方法AKF对目标进行预跟踪;(4)构建训练样本集和测试样本集;(5)构建分类器模型并对其进行迭代训练;(6)获取每幅RD图中的目标类别信息;(7)基于目标类别信息反馈获取毫米波雷达的目标跟踪结果。本发明对多目标跟踪时,考虑到利用不同目标的类别信息辅助跟踪器选取合适的运动模型,该方法解决了现有技术中仅利用单一的运动模型对不同运
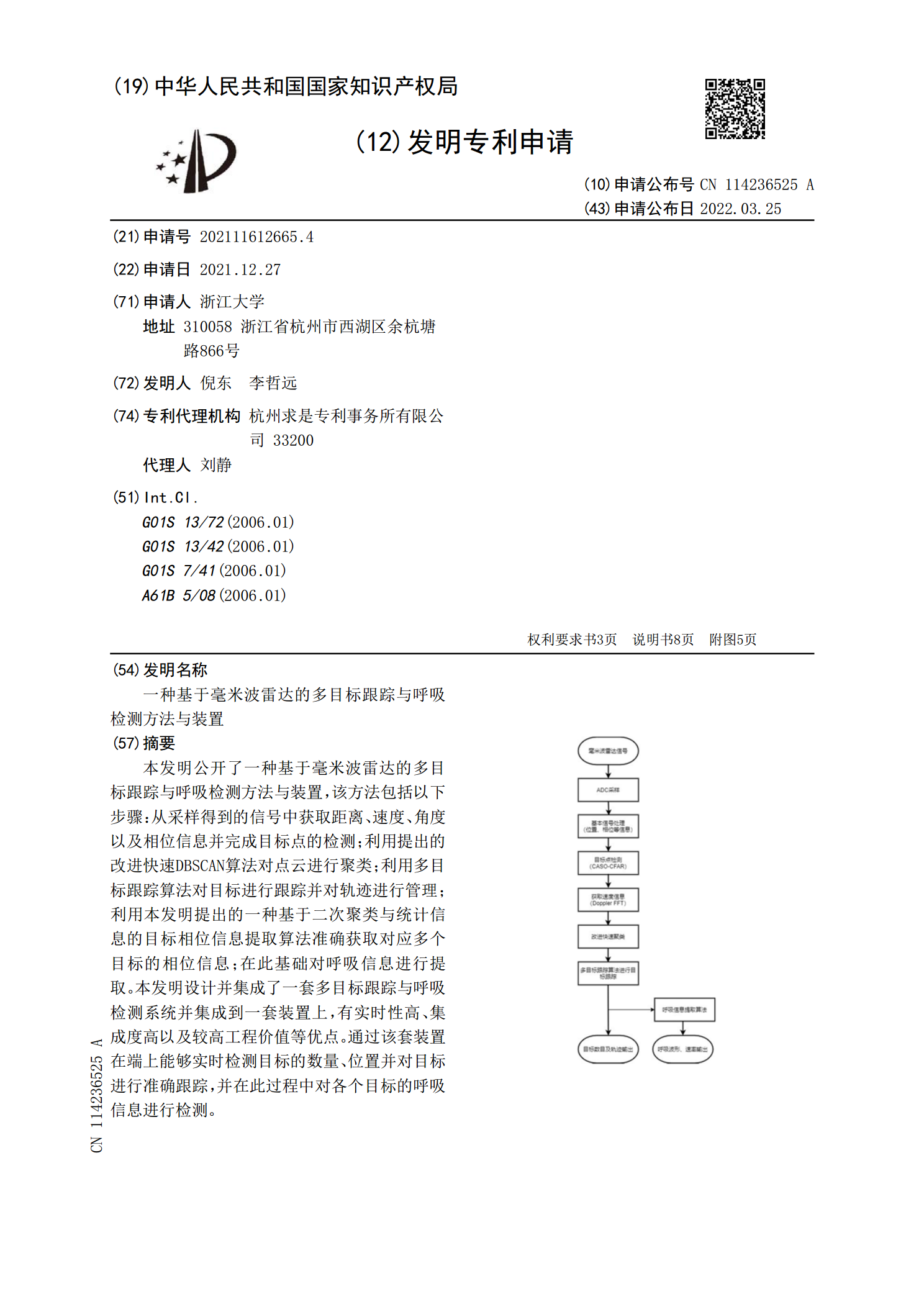
一种基于毫米波雷达的多目标跟踪与呼吸检测方法与装置.pdf
本发明公开了一种基于毫米波雷达的多目标跟踪与呼吸检测方法与装置,该方法包括以下步骤:从采样得到的信号中获取距离、速度、角度以及相位信息并完成目标点的检测;利用提出的改进快速DBSCAN算法对点云进行聚类;利用多目标跟踪算法对目标进行跟踪并对轨迹进行管理;利用本发明提出的一种基于二次聚类与统计信息的目标相位信息提取算法准确获取对应多个目标的相位信息;在此基础对呼吸信息进行提取。本发明设计并集成了一套多目标跟踪与呼吸检测系统并集成到一套装置上,有实时性高、集成度高以及较高工程价值等优点。通过该套装置在端上能够

一种基于车载毫米波雷达的多目标分类方法.pdf
本发明公开了一种基于车载毫米波雷达的多目标分类方法,首先对雷达获取到的不同目标的IF信号进行采样,转换为帧信号,对帧信号进行二维傅里叶变换,归一化后得到距离‑多普勒图;由此构建距离‑多普勒图样本集;其次构建混合级联神经网络分类器,用距离‑多普勒图样本集作为输入对混合级联神经网络分类器进行有监督的学习,获得各支路上分类器的网络参数,最后得到一个能够进行多目标分类的分类器,对雷达获取的目标IF信号进行分类。该方法通过混合级联分类器,克服了级联分类器应用场景的局限性,能够对多种目标类别进行分类。

基于毫米波雷达的目标跟踪方法.pdf
本申请公开了一种基于毫米波雷达的目标跟踪方法,所述方法包括:获取第一目标的位置信息,所述第一目标的位置信息通过毫米波雷达检测获得;根据所述位置信息,以及预设的监控区域的划分,确定所述第一目标所属的目标区域,所述目标区域为所述监控区域中的子区域;控制所述目标区域的摄像头根据所述方位信息调整监控方向,以及根据所述距离信息调整焦距,以采集所述第一目标的人脸图像。