
基于毫米波雷达的目标跟踪方法.pdf

安双****文章

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于毫米波雷达的目标跟踪方法.pdf
本申请公开了一种基于毫米波雷达的目标跟踪方法,所述方法包括:获取第一目标的位置信息,所述第一目标的位置信息通过毫米波雷达检测获得;根据所述位置信息,以及预设的监控区域的划分,确定所述第一目标所属的目标区域,所述目标区域为所述监控区域中的子区域;控制所述目标区域的摄像头根据所述方位信息调整监控方向,以及根据所述距离信息调整焦距,以采集所述第一目标的人脸图像。

毫米波雷达及基于毫米波雷达的目标检测方法.pdf
本发明提供一种毫米波雷达及基于毫米波雷达的目标检测方法。毫米波雷达包括主片雷达和从片雷达,主片雷达包括第一芯片以及与第一芯片耦接的4根发射天线以及4根第一接收天线;从片雷达包括第二芯片以及与第二芯片耦接的4根第二接收天线;其中,4根发射天线沿第一方向等间距设置;4根第一接收天线沿在4根发射天线的第一侧第一方向依次排布,4根第二接收天线在4根发射天线的第二侧沿第一方向依次排布;4根发射天线、4根第一接收天线以及4根第二接收天线的控制时序相同,且4根发射天线发送的毫米波的相位依次间隔45度。
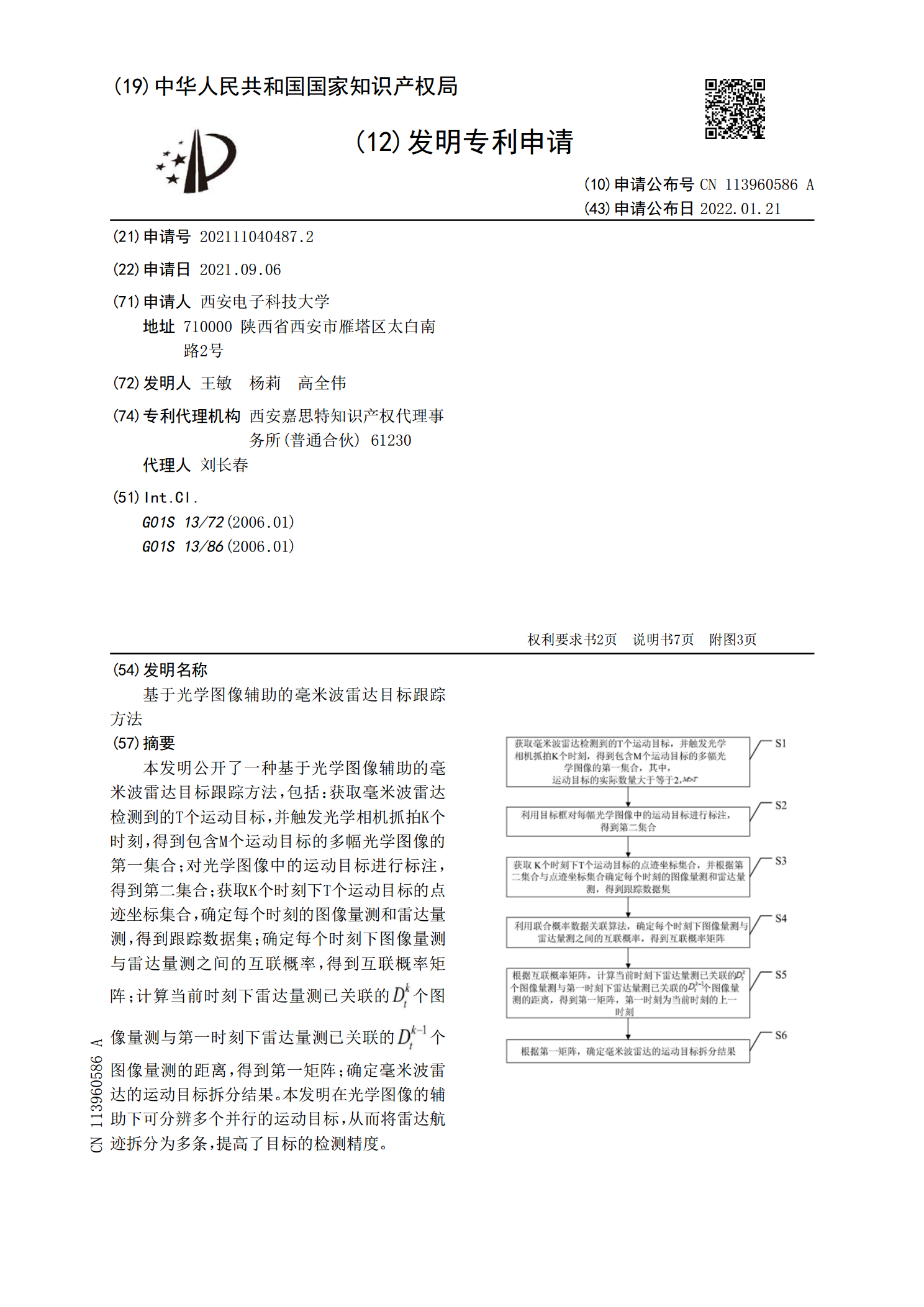
基于光学图像辅助的毫米波雷达目标跟踪方法.pdf
本发明公开了一种基于光学图像辅助的毫米波雷达目标跟踪方法,包括:获取毫米波雷达检测到的T个运动目标,并触发光学相机抓拍K个时刻,得到包含M个运动目标的多幅光学图像的第一集合;对光学图像中的运动目标进行标注,得到第二集合;获取K个时刻下T个运动目标的点迹坐标集合,确定每个时刻的图像量测和雷达量测,得到跟踪数据集;确定每个时刻下图像量测与雷达量测之间的互联概率,得到互联概率矩阵;计算当前时刻下雷达量测已关联的
基于类别信息反馈的毫米波雷达多目标跟踪方法.pdf
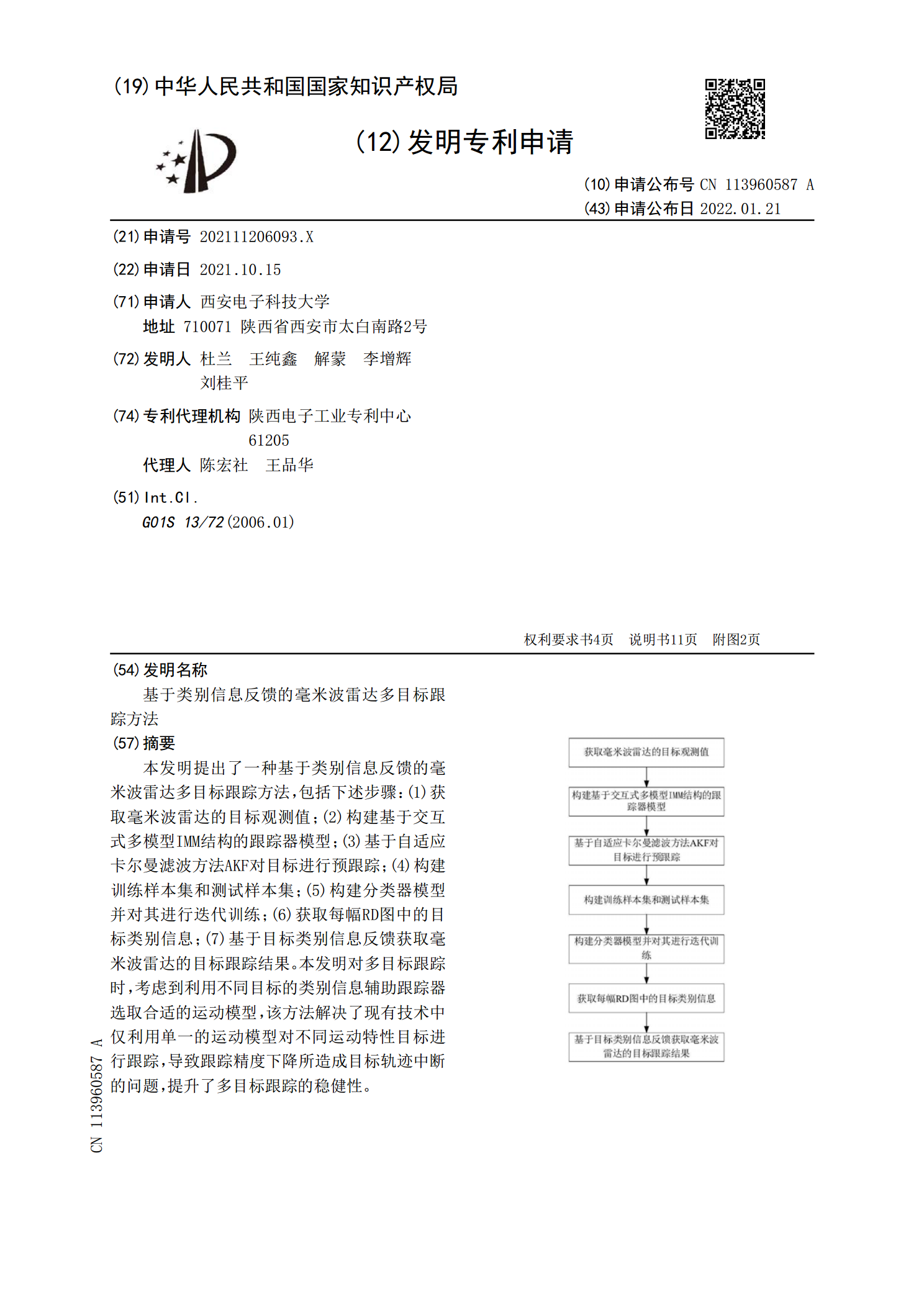
本发明提出了一种基于类别信息反馈的毫米波雷达多目标跟踪方法,包括下述步骤:(1)获取毫米波雷达的目标观测值;(2)构建基于交互式多模型IMM结构的跟踪器模型;(3)基于自适应卡尔曼滤波方法AKF对目标进行预跟踪;(4)构建训练样本集和测试样本集;(5)构建分类器模型并对其进行迭代训练;(6)获取每幅RD图中的目标类别信息;(7)基于目标类别信息反馈获取毫米波雷达的目标跟踪结果。本发明对多目标跟踪时,考虑到利用不同目标的类别信息辅助跟踪器选取合适的运动模型,该方法解决了现有技术中仅利用单一的运动模型对不同运

一种基于毫米波雷达的静止目标跟踪优化方法.pdf
本发明涉及一种基于毫米波雷达的静止目标跟踪优化方法,包括:S10.通过毫米波雷达收集连续多帧的检测点信息,并筛选出对地静止的检测点;S20.对筛选出的对地静止的检测点做本车运动补偿;S30.对补偿后的多帧检测点进行密集聚类,得到多个聚类,并对多个聚类分别起始航迹;S40.将当前帧获得的多个聚类的静止目标与上一帧获得的多个聚类的静止目标的航迹进行关联匹配,通过标准卡尔曼滤波器对与聚类的静止目标相关联的静止目标的航迹进行跟踪,得到静止目标的跟踪结果。本发明通过对历史帧检测点做本车运动补偿,从而还原静止目标在不