
一种除尘风机集群的编队控制方法和系统.pdf

是你****馨呀

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种除尘风机集群的编队控制方法和系统.pdf
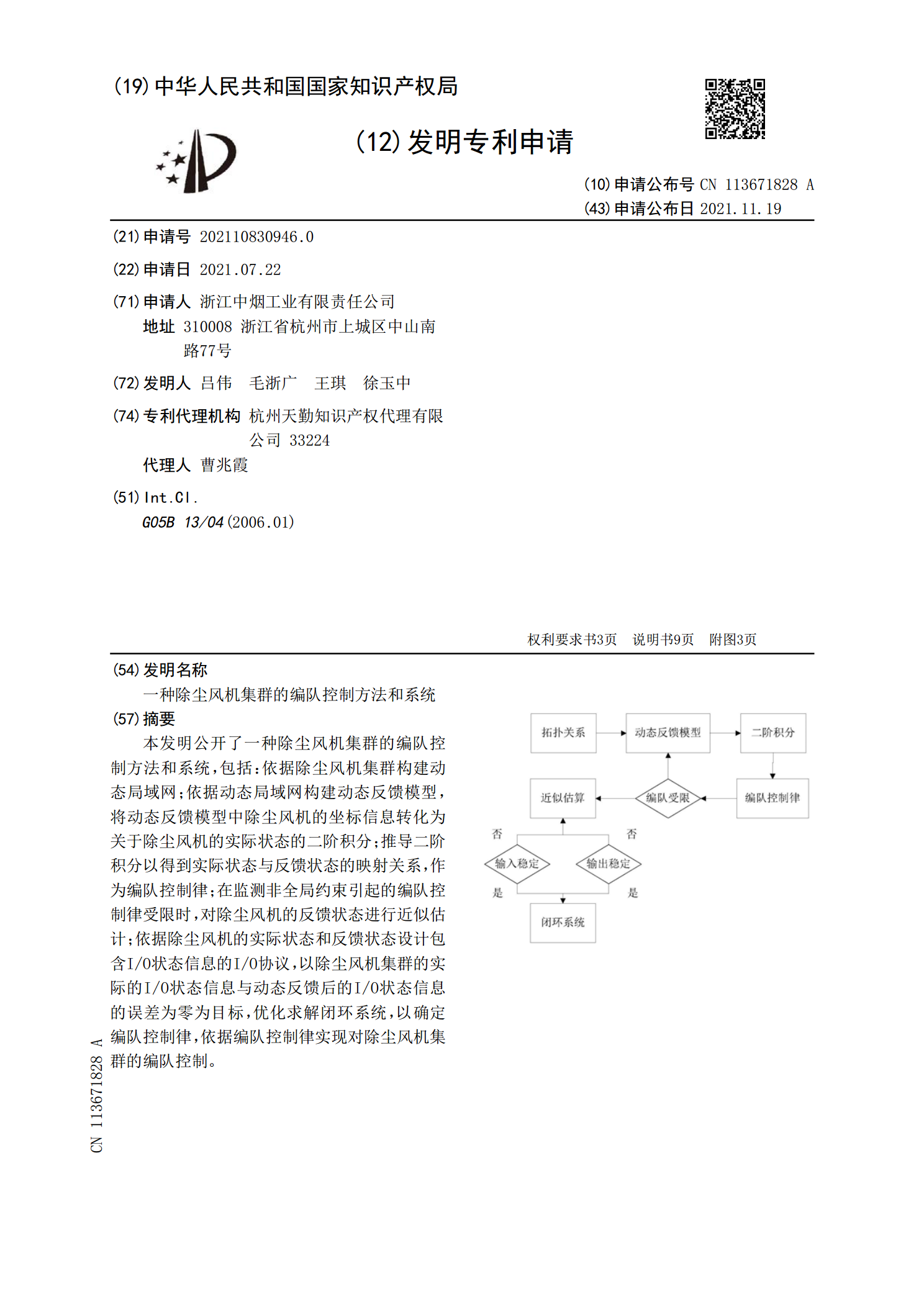
本发明公开了一种除尘风机集群的编队控制方法和系统,包括:依据除尘风机集群构建动态局域网;依据动态局域网构建动态反馈模型,将动态反馈模型中除尘风机的坐标信息转化为关于除尘风机的实际状态的二阶积分;推导二阶积分以得到实际状态与反馈状态的映射关系,作为编队控制律;在监测非全局约束引起的编队控制律受限时,对除尘风机的反馈状态进行近似估计;依据除尘风机的实际状态和反馈状态设计包含I/O状态信息的I/O协议,以除尘风机集群的实际的I/O状态信息与动态反馈后的I/O状态信息的误差为零为目标,优化求解闭环系统,以确定编队
一种集群系统编队避障控制方法.pdf
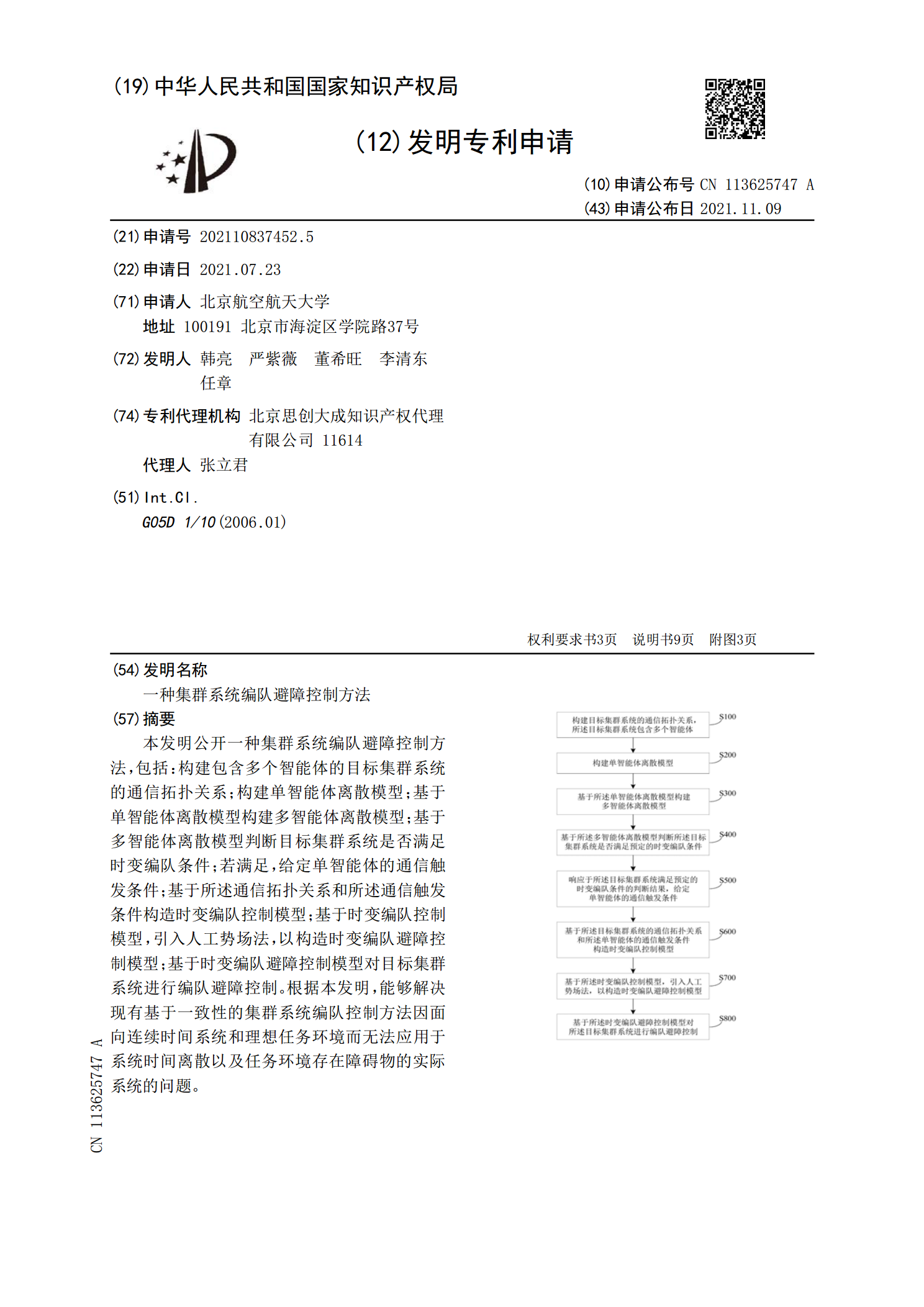
本发明公开一种集群系统编队避障控制方法,包括:构建包含多个智能体的目标集群系统的通信拓扑关系;构建单智能体离散模型;基于单智能体离散模型构建多智能体离散模型;基于多智能体离散模型判断目标集群系统是否满足时变编队条件;若满足,给定单智能体的通信触发条件;基于所述通信拓扑关系和所述通信触发条件构造时变编队控制模型;基于时变编队控制模型,引入人工势场法,以构造时变编队避障控制模型;基于时变编队避障控制模型对目标集群系统进行编队避障控制。根据本发明,能够解决现有基于一致性的集群系统编队控制方法因面向连续时间系统和
一种集群智能系统协同运动规划与编队控制方法.pdf
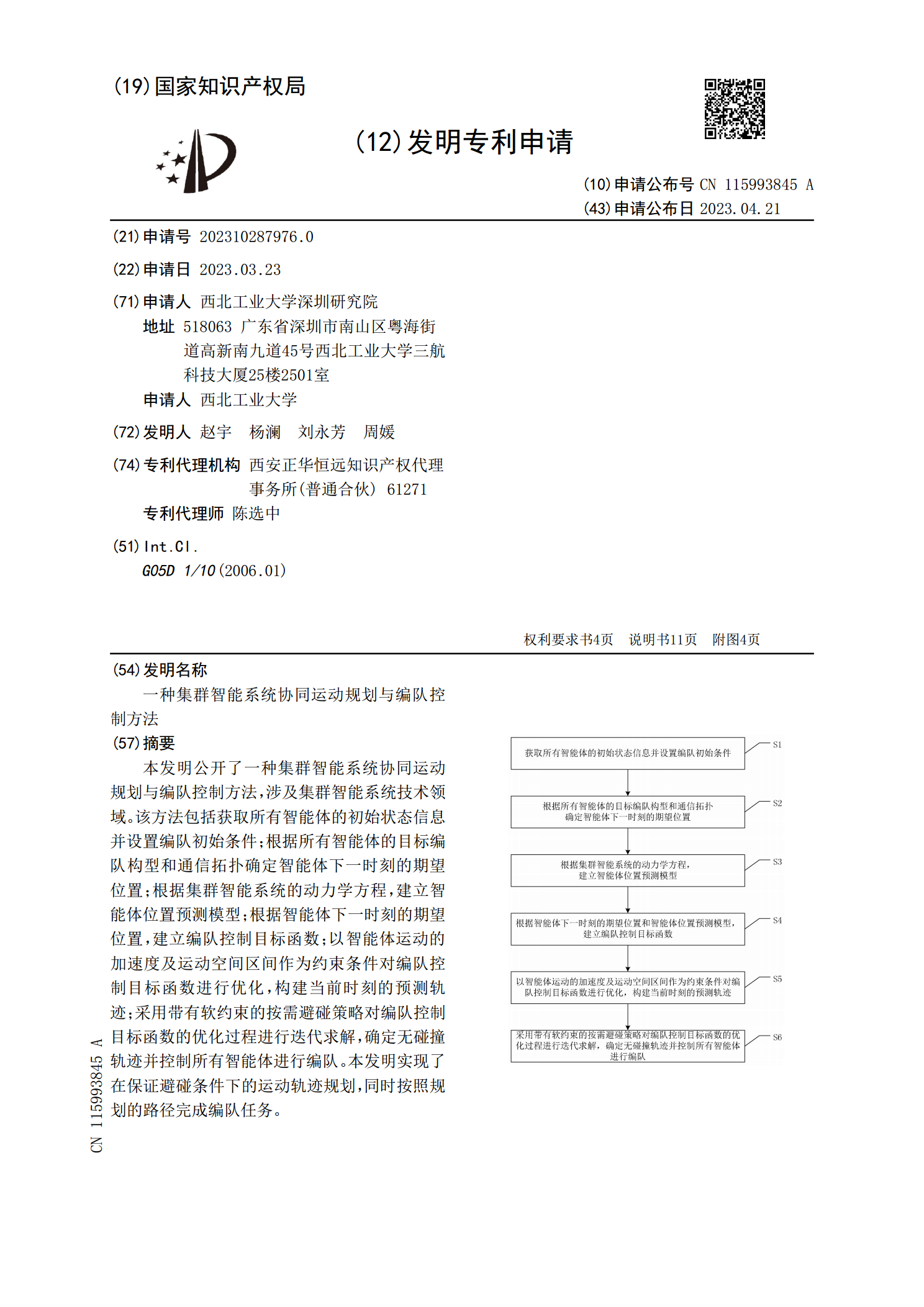
本发明公开了一种集群智能系统协同运动规划与编队控制方法,涉及集群智能系统技术领域。该方法包括获取所有智能体的初始状态信息并设置编队初始条件;根据所有智能体的目标编队构型和通信拓扑确定智能体下一时刻的期望位置;根据集群智能系统的动力学方程,建立智能体位置预测模型;根据智能体下一时刻的期望位置,建立编队控制目标函数;以智能体运动的加速度及运动空间区间作为约束条件对编队控制目标函数进行优化,构建当前时刻的预测轨迹;采用带有软约束的按需避碰策略对编队控制目标函数的优化过程进行迭代求解,确定无碰撞轨迹并控制所有智能
除尘风机的控制方法及控制系统.pdf
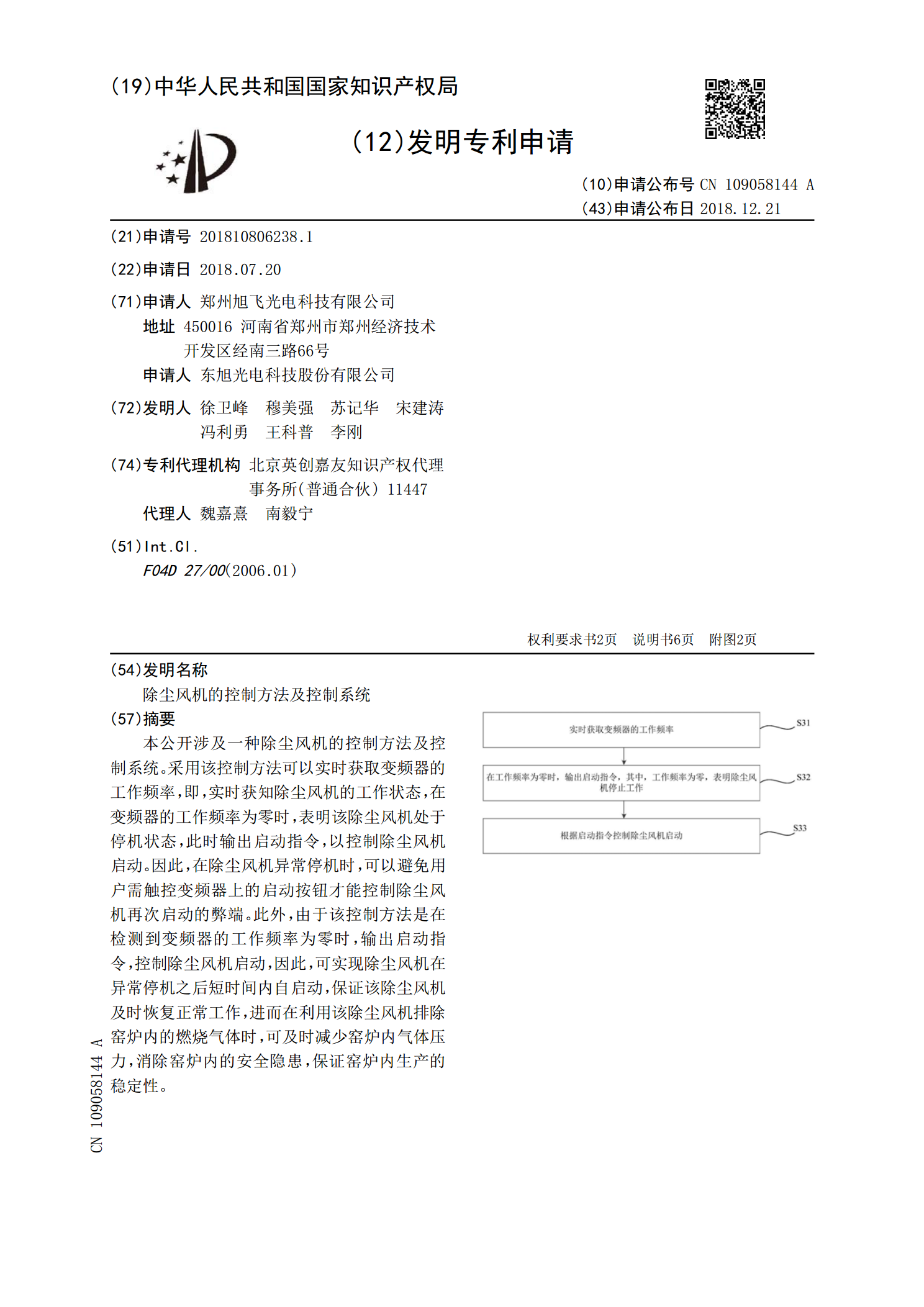
本公开涉及一种除尘风机的控制方法及控制系统。采用该控制方法可以实时获取变频器的工作频率,即,实时获知除尘风机的工作状态,在变频器的工作频率为零时,表明该除尘风机处于停机状态,此时输出启动指令,以控制除尘风机启动。因此,在除尘风机异常停机时,可以避免用户需触控变频器上的启动按钮才能控制除尘风机再次启动的弊端。此外,由于该控制方法是在检测到变频器的工作频率为零时,输出启动指令,控制除尘风机启动,因此,可实现除尘风机在异常停机之后短时间内自启动,保证该除尘风机及时恢复正常工作,进而在利用该除尘风机排除窑炉内的燃

一种四旋翼无人机集群系统的编队控制方法.pdf
本发明公开了一种四旋翼无人机集群系统的编队控制方法,属于无人机控制技术领域。该方法包括建立悬停状态下四旋翼无人机的高阶线性模型;建立通讯拓扑模型并设置期望编队构型;获取初始状态信息以及初始化信息;根据高阶线性模型、通讯拓扑模型、期望编队构型、初始状态信息、初始化信息和所有邻居四旋翼无人机的实时状态信息确定编队控制律;根据分布式编队控制律实时更新四旋翼无人机的状态,使所有四旋翼无人机在预期的时间点准时完成编队任务。本发明能够大幅度弱化通讯网络的拓扑条件,极大程度减少非必要的通信链路从而降低通讯成本,同时四旋