
一种四旋翼无人机集群系统的编队控制方法.pdf

小代****回来

1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种四旋翼无人机集群系统的编队控制方法.pdf
本发明公开了一种四旋翼无人机集群系统的编队控制方法,属于无人机控制技术领域。该方法包括建立悬停状态下四旋翼无人机的高阶线性模型;建立通讯拓扑模型并设置期望编队构型;获取初始状态信息以及初始化信息;根据高阶线性模型、通讯拓扑模型、期望编队构型、初始状态信息、初始化信息和所有邻居四旋翼无人机的实时状态信息确定编队控制律;根据分布式编队控制律实时更新四旋翼无人机的状态,使所有四旋翼无人机在预期的时间点准时完成编队任务。本发明能够大幅度弱化通讯网络的拓扑条件,极大程度减少非必要的通信链路从而降低通讯成本,同时四旋

四旋翼无人机编队飞行控制方法的研究的任务书.docx
四旋翼无人机编队飞行控制方法的研究的任务书任务书:四旋翼无人机编队飞行控制方法的研究任务背景:随着无人机技术的发展,无人机编队飞行技术已经成为了未来无人机应用的热门研究领域。无人机编队飞行具有高效、灵活、多功能和易扩展等特点,广泛应用于军事作战、反恐行动、城市规划、环境监测等领域。本项目旨在研究四旋翼无人机编队飞行控制方法,提升无人机的编队控制性能和综合能力,推进无人机应用技术的发展。研究目的:本研究旨在通过对四旋翼无人机编队控制方法的研究探索编队控制和协同飞行的技术实现和优化,提升无人机编队的飞行质量,
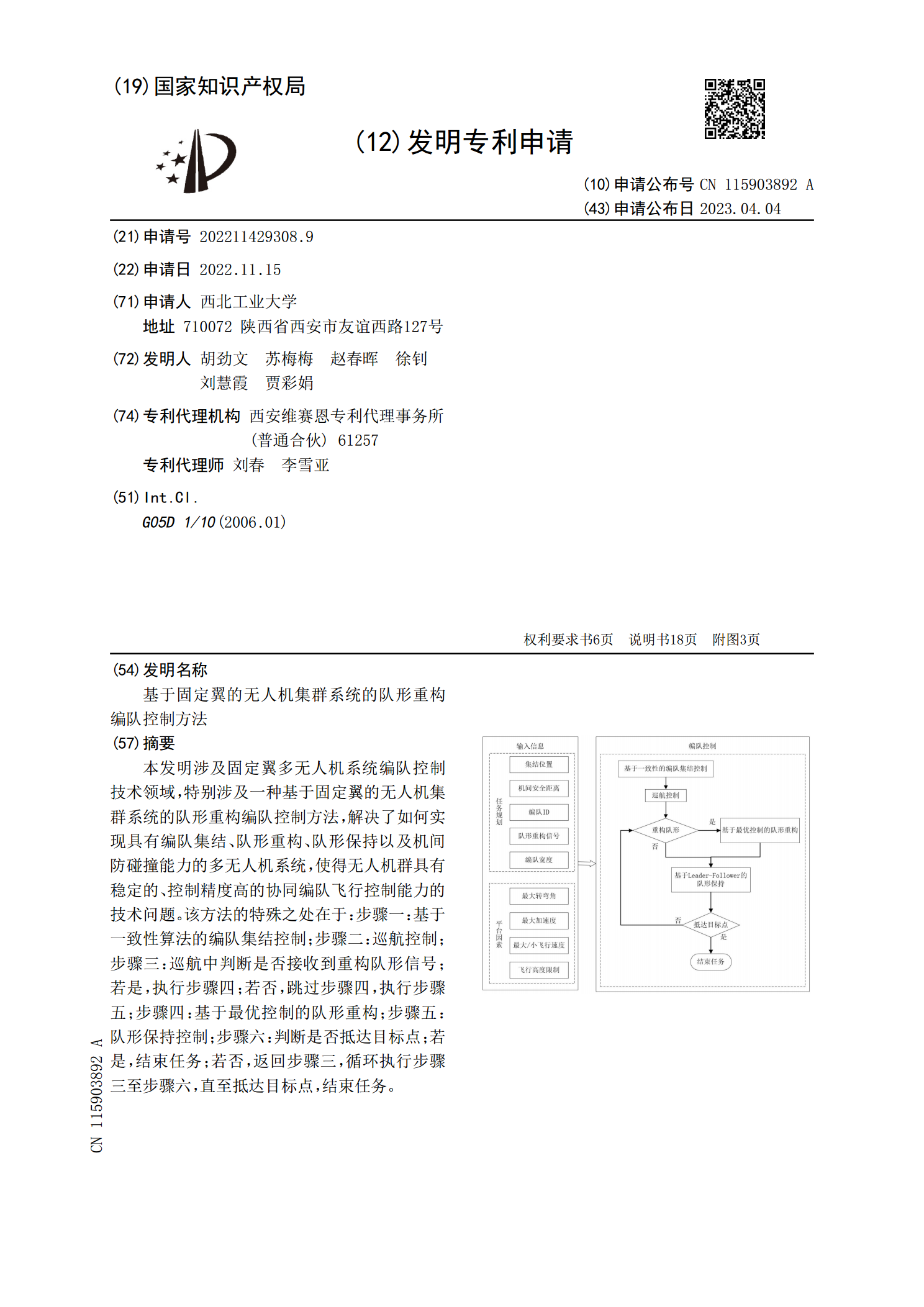
基于固定翼的无人机集群系统的队形重构编队控制方法.pdf
本发明涉及固定翼多无人机系统编队控制技术领域,特别涉及一种基于固定翼的无人机集群系统的队形重构编队控制方法,解决了如何实现具有编队集结、队形重构、队形保持以及机间防碰撞能力的多无人机系统,使得无人机群具有稳定的、控制精度高的协同编队飞行控制能力的技术问题。该方法的特殊之处在于:步骤一:基于一致性算法的编队集结控制;步骤二:巡航控制;步骤三:巡航中判断是否接收到重构队形信号;若是,执行步骤四;若否,跳过步骤四,执行步骤五;步骤四:基于最优控制的队形重构;步骤五:队形保持控制;步骤六:判断是否抵达目标点;若是
蜂巢式集群多旋翼无人机结构及其控制方法.pdf
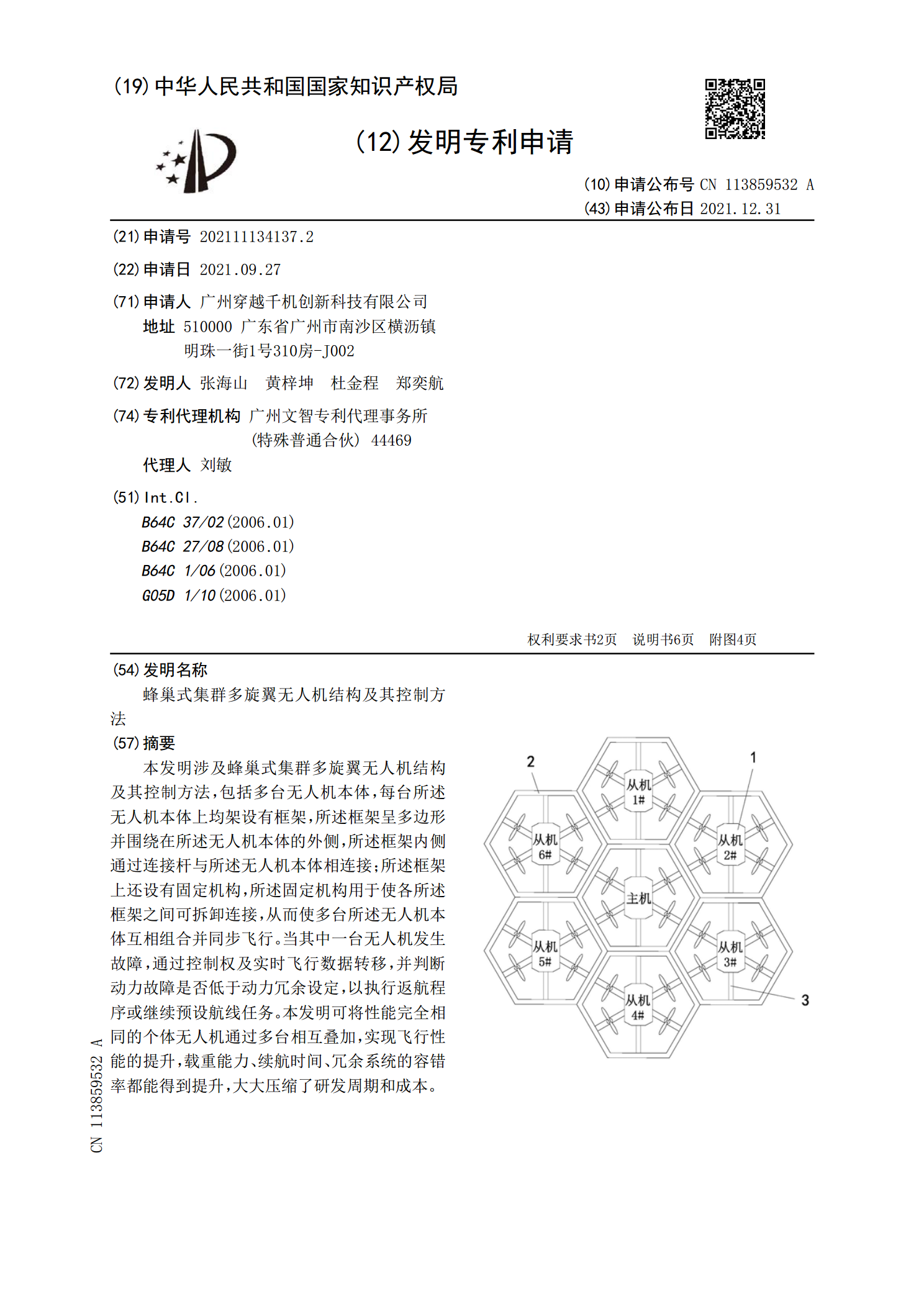
本发明涉及蜂巢式集群多旋翼无人机结构及其控制方法,包括多台无人机本体,每台所述无人机本体上均架设有框架,所述框架呈多边形并围绕在所述无人机本体的外侧,所述框架内侧通过连接杆与所述无人机本体相连接;所述框架上还设有固定机构,所述固定机构用于使各所述框架之间可拆卸连接,从而使多台所述无人机本体互相组合并同步飞行。当其中一台无人机发生故障,通过控制权及实时飞行数据转移,并判断动力故障是否低于动力冗余设定,以执行返航程序或继续预设航线任务。本发明可将性能完全相同的个体无人机通过多台相互叠加,实现飞行性能的提升,载

一种无人机旋翼、旋翼的组装方法和旋翼式无人机.pdf
本发明涉及一种无人机旋翼和旋翼式无人机,无人机机身上开设安装槽,安装槽的上方固定连接槽盖,槽盖上方设置有桨叶,安装槽内部设置有内齿环、外齿盘和电机,内齿环固定于安装槽的内底壁,内齿环的内表面啮合有外齿盘,外齿盘的上表面固定有电机,电机的输出端向上连接旋转轴,槽盖中心位置开设中心孔,桨叶具有向下的连接轴,连接轴下端穿过中心孔,连接轴下端内部开设有连接槽,旋转轴插入连接槽中,连接轴上部和旋转轴内部开设大小相同的内螺纹槽,高强度螺栓由上至下穿过连接轴和旋转轴,上端以螺母锁定。本发明较好地解决了无人机机身和旋翼之