
一种分阶段多基地无人机任务分配和航迹规划方法.pdf

努力****亚捷

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种分阶段多基地无人机任务分配和航迹规划方法.pdf
本发明公开了一种分阶段多基地无人机任务分配和航迹规划方法,包括区域设置,任务分配及航迹规划等三个步骤。本发明以异构多无人机疏散配置在多个基地、协同执行多目标探测任务为应用背景,通过区域设置、改进A*算法预估航程矩阵、多基地多无人机任务分配、基地内单无人机时序任务分配、航迹规划等多个阶段,实现多基地多无人机的任务规划。多基地多无人机任务分配阶段,当任务数量多、区域集中分布时,基于改进K‑means算法求解,当任务数量少、疏散分布时,采用深度遍历方法求解;单无人机时序任务分配阶段,基于TSP模型和遗传算法求解

无人机任务分配与航迹规划协同控制方法.docx
无人机任务分配与航迹规划协同控制方法无人机任务分配与航迹规划协同控制方法摘要:随着无人机技术的快速发展,无人机已成为各个领域中一种重要的工具。然而,无人机任务分配与航迹规划协同控制方法成为无人机应用中的一个重要问题。本文提出了一种基于协同控制的无人机任务分配与航迹规划方法,通过对无人机任务的分析和航迹规划的优化,使得多个无人机在分配任务的同时协同飞行,提高任务完成效率。1.引言无人机的广泛应用已为各个行业带来了许多机遇和挑战。在多无人机协同执行任务的过程中,任务分配和航迹规划是至关重要的环节。合理的任务分
有限通信下面向多无人机联合任务分配和航迹规划的方法.pdf
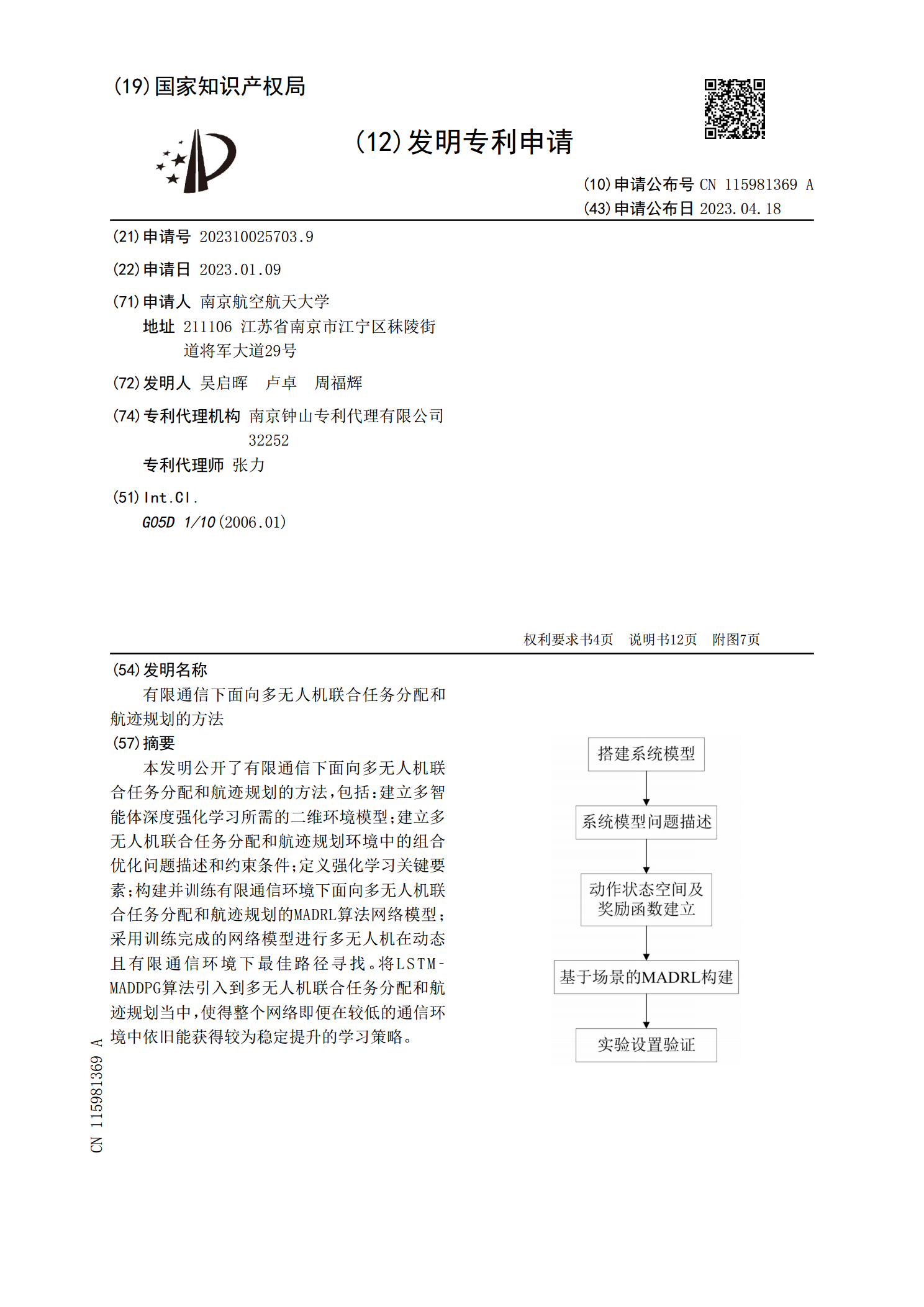
本发明公开了有限通信下面向多无人机联合任务分配和航迹规划的方法,包括:建立多智能体深度强化学习所需的二维环境模型;建立多无人机联合任务分配和航迹规划环境中的组合优化问题描述和约束条件;定义强化学习关键要素;构建并训练有限通信环境下面向多无人机联合任务分配和航迹规划的MADRL算法网络模型;采用训练完成的网络模型进行多无人机在动态且有限通信环境下最佳路径寻找。将LSTM‑MADDPG算法引入到多无人机联合任务分配和航迹规划当中,使得整个网络即便在较低的通信环境中依旧能获得较为稳定提升的学习策略。

无人机集群作战的航迹规划和任务分配技术研究的开题报告.docx
无人机集群作战的航迹规划和任务分配技术研究的开题报告一、选题背景随着无人机技术的不断发展,无人机已成为现代战争中不可或缺的一种作战工具。随着无人机技术的不断提升,单一无人机作战已不能完全满足现代战争需要,要了解集群作战的航迹规划和任务分配技术对无人机的作战能力提升具有重要意义。集群作战是指由多架无人机组成的作战单元,在一定的规模内协调作战任务的执行,具有较高的作战效率和灵活性。航迹规划和任务分配是集群作战中关键的技术问题,已成为当前无人机集群作战的研究热点。二、选题意义目前,无人机已成为现代战争中的主要作

无人机集群作战的航迹规划和任务分配技术研究的任务书.docx
无人机集群作战的航迹规划和任务分配技术研究的任务书任务书一、任务背景无人机技术的发展给现代军事作战带来了革命性的变化。随着无人机技术的不断升级和普及,无人机使用的场景也越来越多样化。在现代战争中,无人机集群作战已成为一种重要的战术手段,可以充分发挥其集体优势,提高任务的完成效率和战斗力。因此,为了提高无人机集群作战的效率和可靠性,需要针对无人机的航迹规划和任务分配进行深入的研究。二、任务目标本项目旨在通过对无人机集群作战的航迹规划和任务分配技术进行研究,提高无人机集群作战的运用效率和战斗力,具体目标如下: