
一种基于图像和点云实例匹配的三维目标检测算法.pdf

Th****84


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于图像和点云实例匹配的三维目标检测算法.pdf
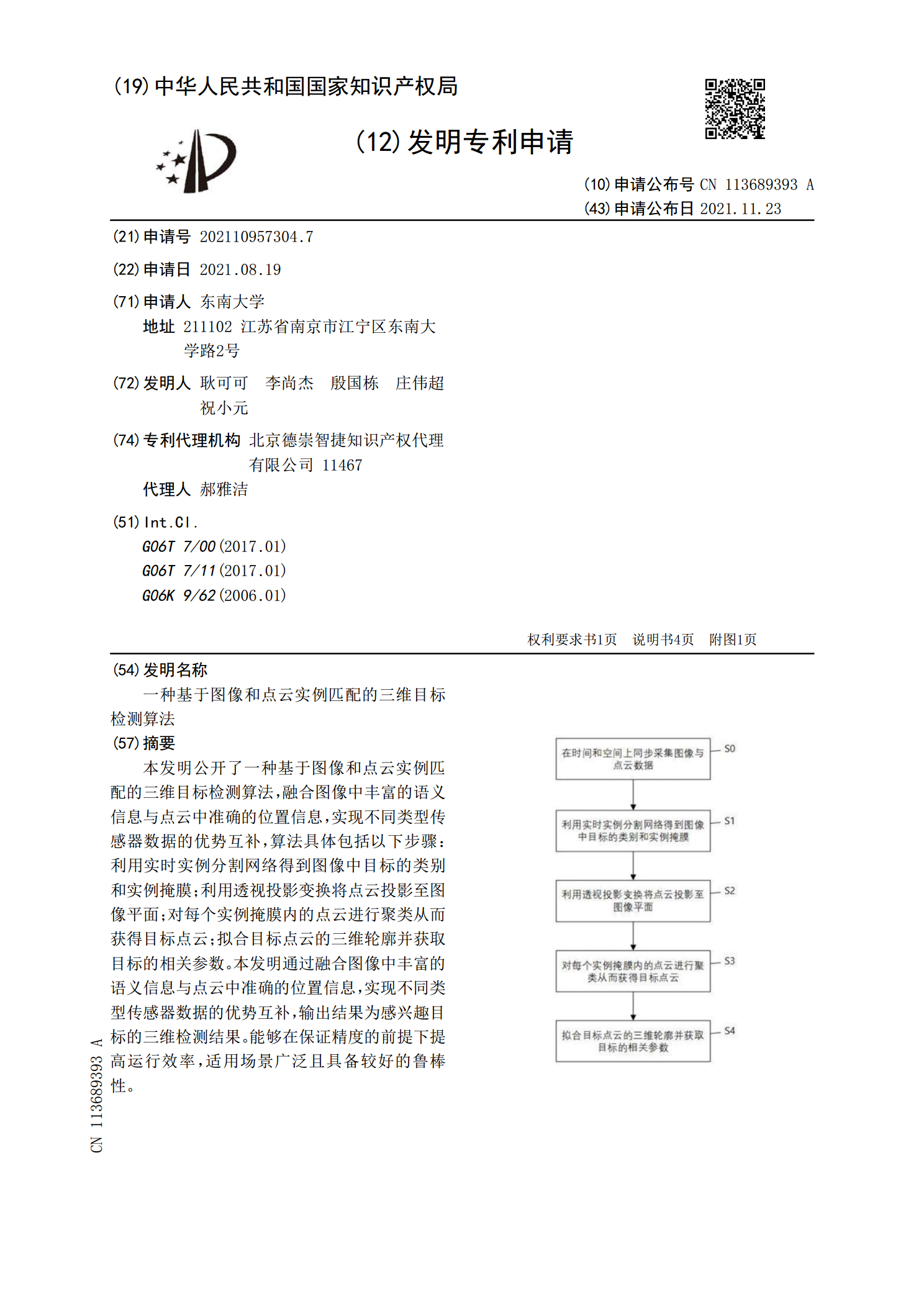
本发明公开了一种基于图像和点云实例匹配的三维目标检测算法,融合图像中丰富的语义信息与点云中准确的位置信息,实现不同类型传感器数据的优势互补,算法具体包括以下步骤:利用实时实例分割网络得到图像中目标的类别和实例掩膜;利用透视投影变换将点云投影至图像平面;对每个实例掩膜内的点云进行聚类从而获得目标点云;拟合目标点云的三维轮廓并获取目标的相关参数。本发明通过融合图像中丰富的语义信息与点云中准确的位置信息,实现不同类型传感器数据的优势互补,输出结果为感兴趣目标的三维检测结果。能够在保证精度的前提下提高运行效率,适

基于图像和点云实例匹配的智能车目标检测和跟踪.docx
基于图像和点云实例匹配的智能车目标检测和跟踪目录一、内容简述................................................2二、技术背景................................................21.智能车技术概述........................................32.目标检测与跟踪技术....................................43.图像和点云数据介绍............

基于点对特征的三维点云匹配算法.docx
基于点对特征的三维点云匹配算法基于点对特征的三维点云匹配算法摘要:三维点云匹配是计算机视觉领域中的一个重要问题,其在机器人感知、地图构建和物体识别等应用中起着关键作用。本文提出了一种基于点对特征的三维点云匹配算法。该算法通过将三维点云转化为点对特征表示,并利用点对特征之间的相关性进行匹配,以提高匹配的准确性和鲁棒性。实验证明,该算法在不同数据集上均能获得较好的匹配效果。关键词:三维点云;点对特征;匹配算法;准确性;鲁棒性1.引言三维点云是由激光雷达等传感器收集而来的一个重要数据形式,它可以提供物体的几何形
一种基于伪图像的点云与图像融合三维目标检测方法.pdf
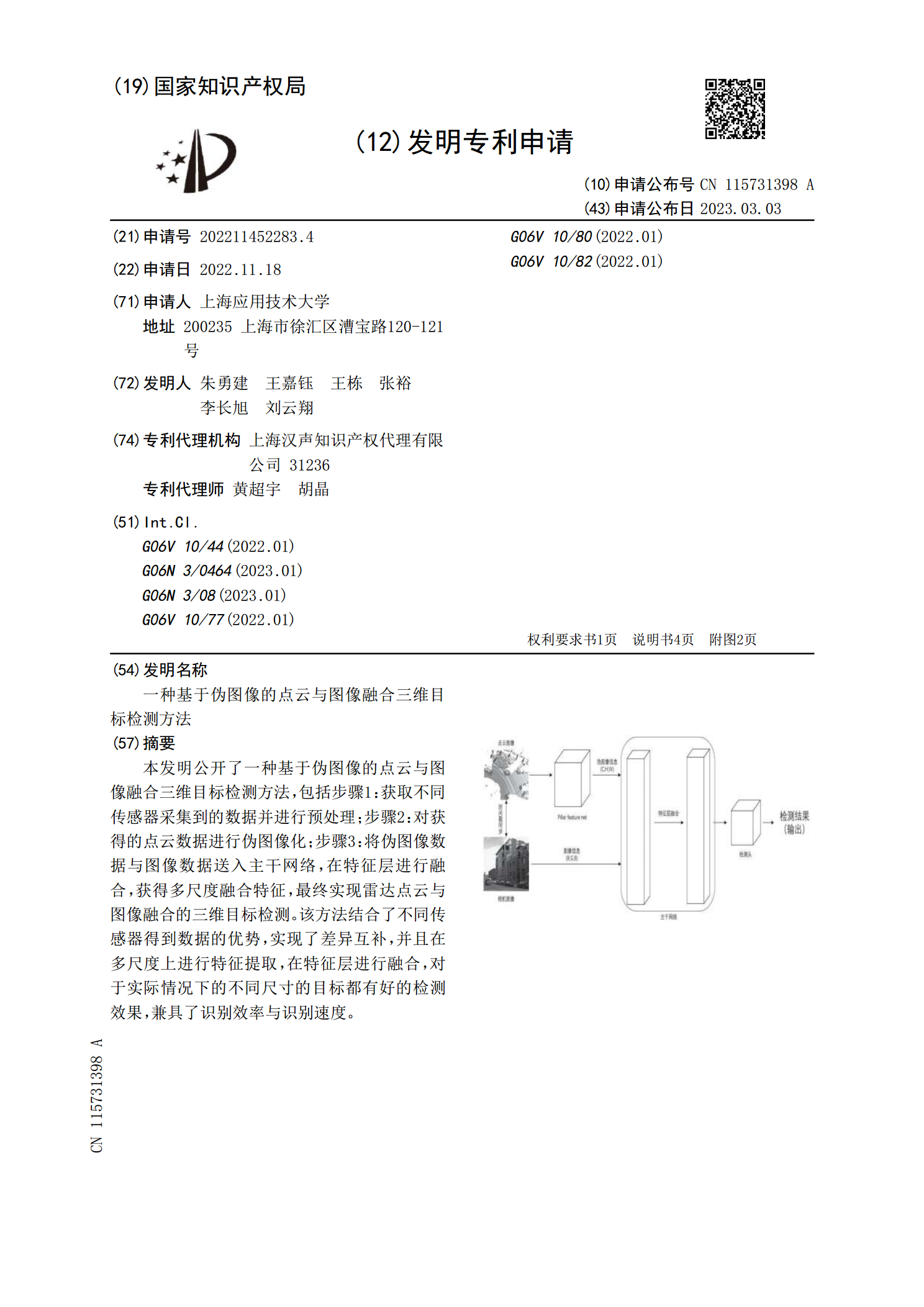
本发明公开了一种基于伪图像的点云与图像融合三维目标检测方法,包括步骤1:获取不同传感器采集到的数据并进行预处理;步骤2:对获得的点云数据进行伪图像化;步骤3:将伪图像数据与图像数据送入主干网络,在特征层进行融合,获得多尺度融合特征,最终实现雷达点云与图像融合的三维目标检测。该方法结合了不同传感器得到数据的优势,实现了差异互补,并且在多尺度上进行特征提取,在特征层进行融合,对于实际情况下的不同尺寸的目标都有好的检测效果,兼具了识别效率与识别速度。

基于立体匹配的低纹理图像三维点云重建算法研究.docx
基于立体匹配的低纹理图像三维点云重建算法研究摘要:本文研究了一种基于立体匹配的低纹理图像三维点云重建算法。该算法的主要思想是通过对图像进行立体匹配,获取不同视角下的深度信息,然后将深度信息转换为三维点云,最终重建出三维模型。本文首先介绍了立体匹配的基本原理和相关算法,并详细分析了低纹理图像三维点云重建面临的挑战和难点。随后,我们提出了一种基于双目视觉和局部特征匹配的三维点云重建算法,该算法通过将双目图像转换为灰度图像并进行特征提取和匹配,实现了低纹理图像三维重建。最后,我们通过实验验证了该算法的有效性和优