
一种双目图像特征匹配方法及系统.pdf

茂学****23


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双目图像特征匹配方法及系统.pdf
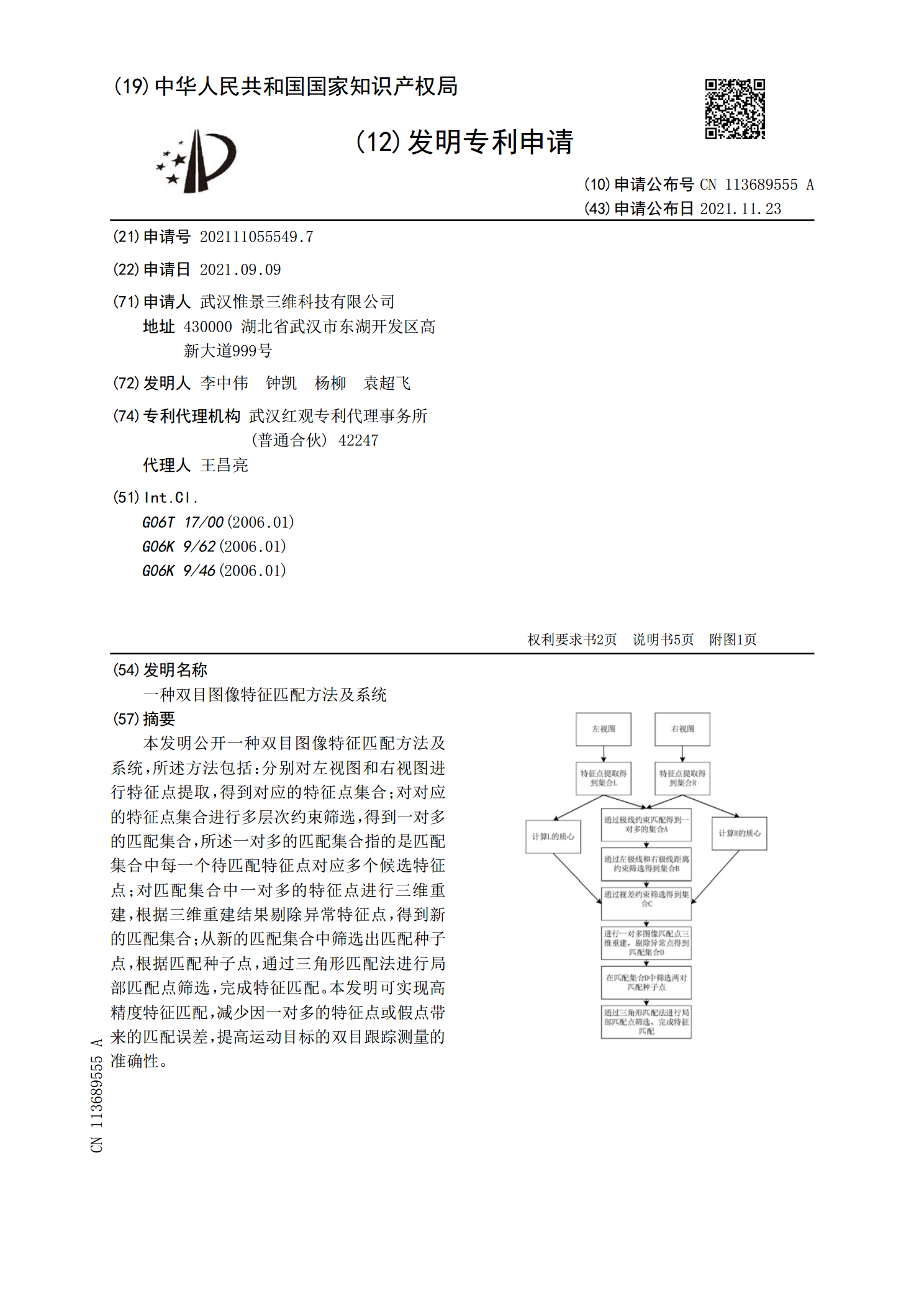
本发明公开一种双目图像特征匹配方法及系统,所述方法包括:分别对左视图和右视图进行特征点提取,得到对应的特征点集合;对对应的特征点集合进行多层次约束筛选,得到一对多的匹配集合,所述一对多的匹配集合指的是匹配集合中每一个待匹配特征点对应多个候选特征点;对匹配集合中一对多的特征点进行三维重建,根据三维重建结果剔除异常特征点,得到新的匹配集合;从新的匹配集合中筛选出匹配种子点,根据匹配种子点,通过三角形匹配法进行局部匹配点筛选,完成特征匹配。本发明可实现高精度特征匹配,减少因一对多的特征点或假点带来的匹配误差,提
一种基于特征的图像匹配方法及系统.pdf
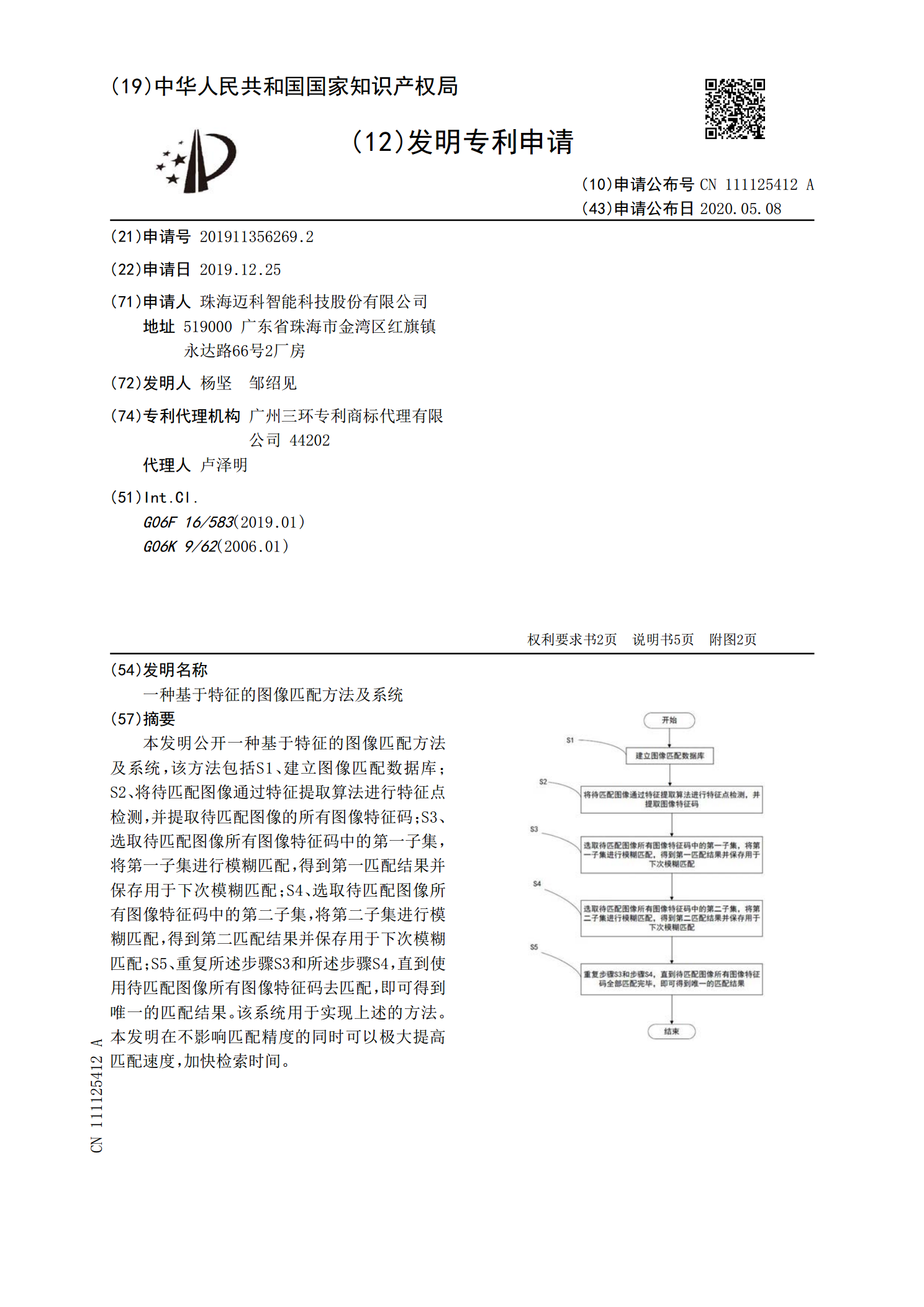
本发明公开一种基于特征的图像匹配方法及系统,该方法包括S1、建立图像匹配数据库;S2、将待匹配图像通过特征提取算法进行特征点检测,并提取待匹配图像的所有图像特征码;S3、选取待匹配图像所有图像特征码中的第一子集,将第一子集进行模糊匹配,得到第一匹配结果并保存用于下次模糊匹配;S4、选取待匹配图像所有图像特征码中的第二子集,将第二子集进行模糊匹配,得到第二匹配结果并保存用于下次模糊匹配;S5、重复所述步骤S3和所述步骤S4,直到使用待匹配图像所有图像特征码去匹配,即可得到唯一的匹配结果。该系统用于实现上述的

基于改进SIFT特征的双目图像匹配算法.docx
基于改进SIFT特征的双目图像匹配算法基于改进SIFT特征的双目图像匹配算法摘要:双目图像匹配是计算机视觉领域的重要问题之一。本文针对传统的SIFT(尺度不变特征转换)算法在双目图像匹配中存在的问题,提出了一种改进的SIFT特征匹配算法。该算法通过引入颜色纹理特征和快速SIFT特征提取方法,提高了双目图像匹配的准确性和鲁棒性。实验结果表明,改进的SIFT特征匹配算法在双目图像匹配任务中具有较高的性能。关键词:双目图像匹配、SIFT特征、颜色纹理特征、快速SIFT特征提取1.引言双目图像匹配是计算机视觉研究

基于图像相似几何特征的双目匹配算法.docx
基于图像相似几何特征的双目匹配算法基于图像相似几何特征的双目匹配算法摘要:双目视觉系统在三维视觉领域中具有广泛应用。该论文提出了一种基于图像相似几何特征的双目匹配算法,该算法能够在不同视角下进行准确的深度信息推测。我们首先介绍了双目视觉系统的原理,并详细阐述了双目匹配算法的基本思想。接着,我们提出了一种用于计算图像相似几何特征的方法,该方法将图像块的相似性和几何特征相结合。通过对输入图像进行分块处理,并计算相邻块之间的相似性和几何特征,我们可以得到一组匹配对。最后,我们在公开数据集上进行了实验验证,并与其

一种内窥镜图像特征点匹配方法及系统.pdf
本发明实施例提供一种内窥镜图像特征点匹配方法及系统。该方法包括基于两幅待匹配的内窥镜图像提取图像特征点,并基于特征描述子相似度完成图像特征点匹配,获取初始匹配点对集合;对初始匹配点对集合进行局部距离约束,结合仿射参数和对应特征点运动信息对特征点信息进行扩展,估算相似度边界,得到具有运动一致性的特征点对应关系集合;基于特征点对应关系集合对空间距离感知进行优化,生成双边仿射运动一致性模型,设置双边运动边界的自适应距离阈值参数,得到全局图像对应的内点匹配集合,实现特征点匹配。本发明实施例通过基于局部性保持的运动