
一种雷达标定方法、装置、电子设备和介质.pdf

努力****甲寅


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种雷达标定方法、装置、电子设备和介质.pdf
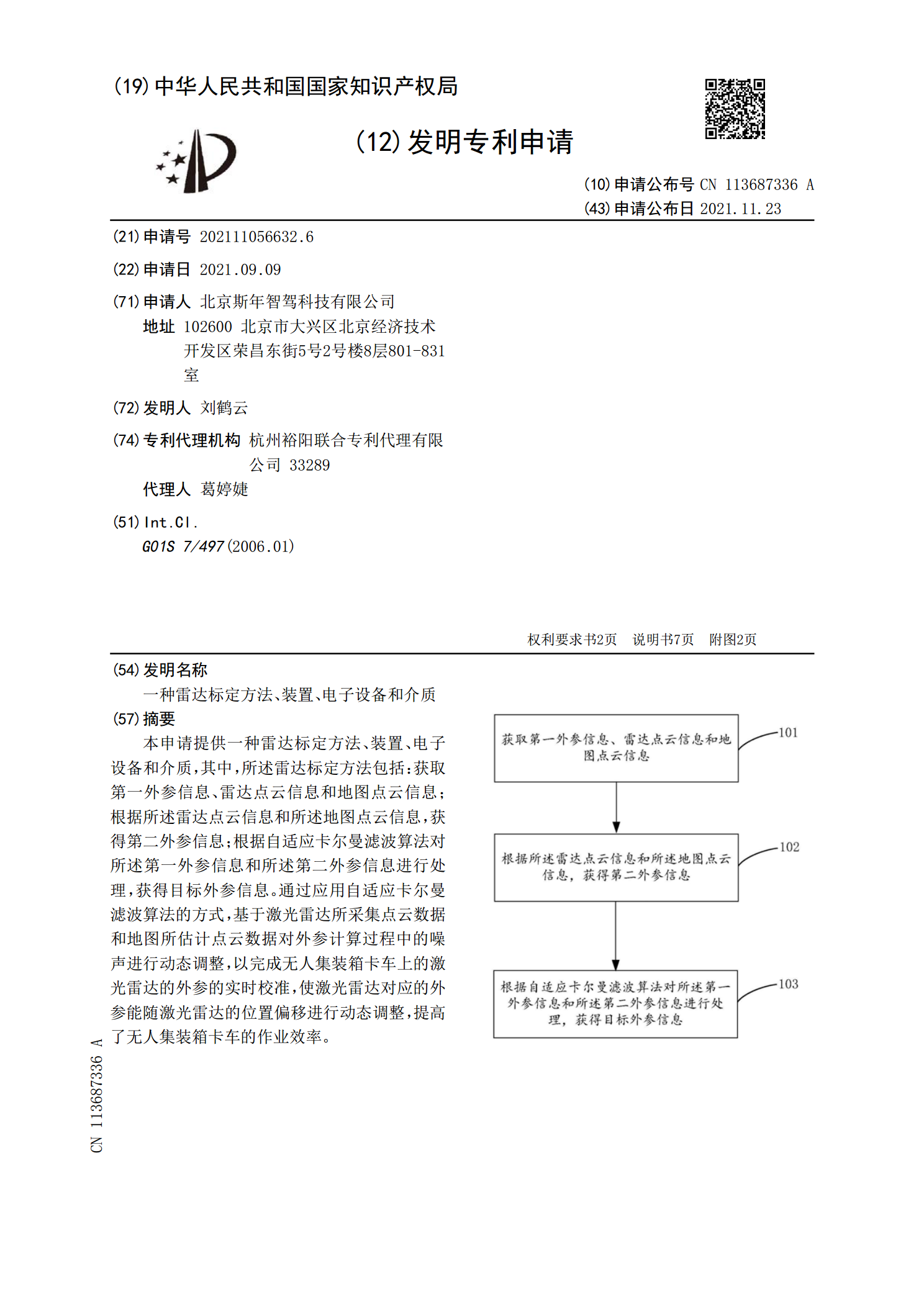
本申请提供一种雷达标定方法、装置、电子设备和介质,其中,所述雷达标定方法包括:获取第一外参信息、雷达点云信息和地图点云信息;根据所述雷达点云信息和所述地图点云信息,获得第二外参信息;根据自适应卡尔曼滤波算法对所述第一外参信息和所述第二外参信息进行处理,获得目标外参信息。通过应用自适应卡尔曼滤波算法的方式,基于激光雷达所采集点云数据和地图所估计点云数据对外参计算过程中的噪声进行动态调整,以完成无人集装箱卡车上的激光雷达的外参的实时校准,使激光雷达对应的外参能随激光雷达的位置偏移进行动态调整,提高了无人集装箱
激光雷达的标定校准方法、装置、存储介质及电子设备.pdf
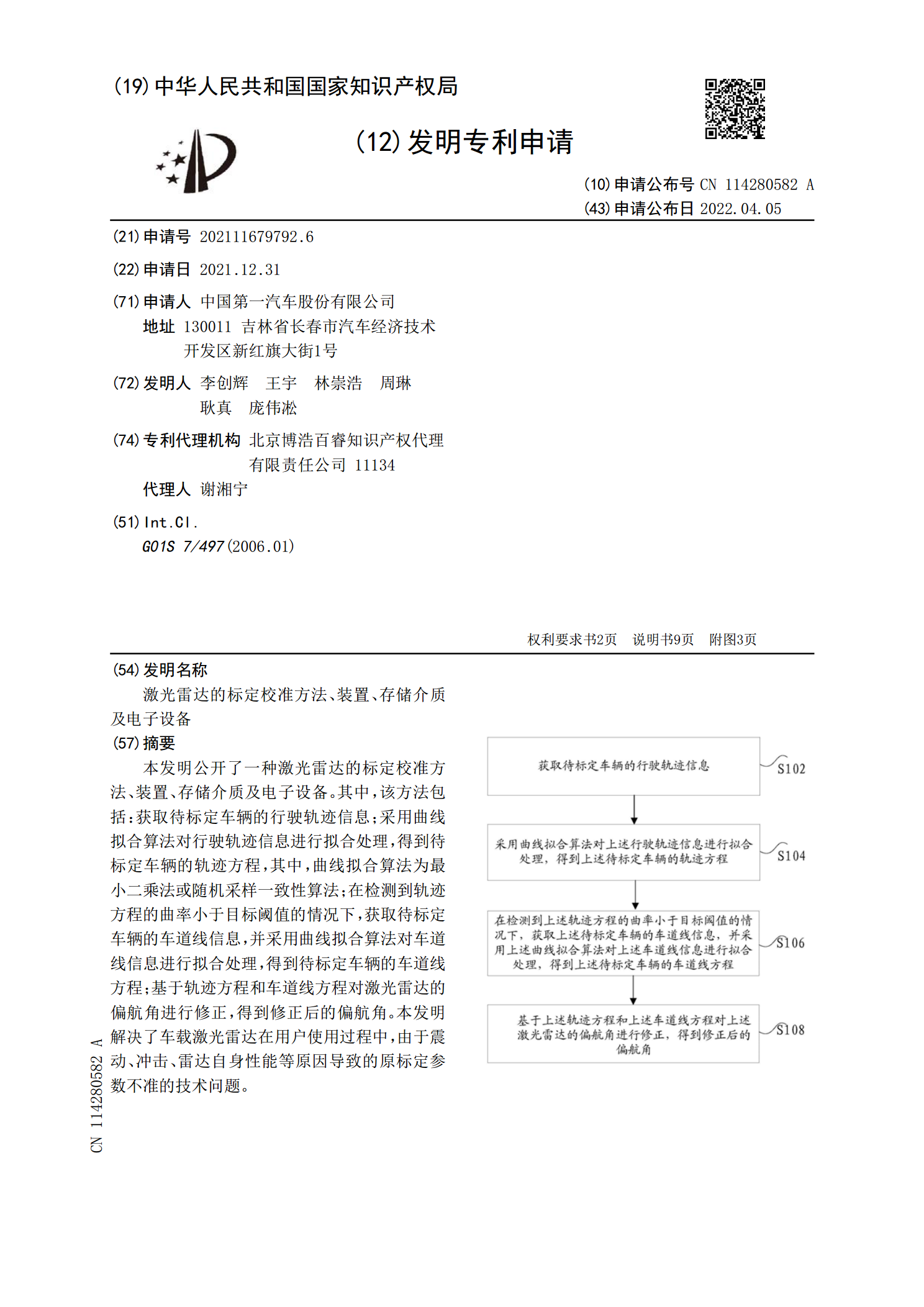
本发明公开了一种激光雷达的标定校准方法、装置、存储介质及电子设备。其中,该方法包括:获取待标定车辆的行驶轨迹信息;采用曲线拟合算法对行驶轨迹信息进行拟合处理,得到待标定车辆的轨迹方程,其中,曲线拟合算法为最小二乘法或随机采样一致性算法;在检测到轨迹方程的曲率小于目标阈值的情况下,获取待标定车辆的车道线信息,并采用曲线拟合算法对车道线信息进行拟合处理,得到待标定车辆的车道线方程;基于轨迹方程和车道线方程对激光雷达的偏航角进行修正,得到修正后的偏航角。本发明解决了车载激光雷达在用户使用过程中,由于震动、冲击、
标定方法及装置、电子设备和存储介质.pdf
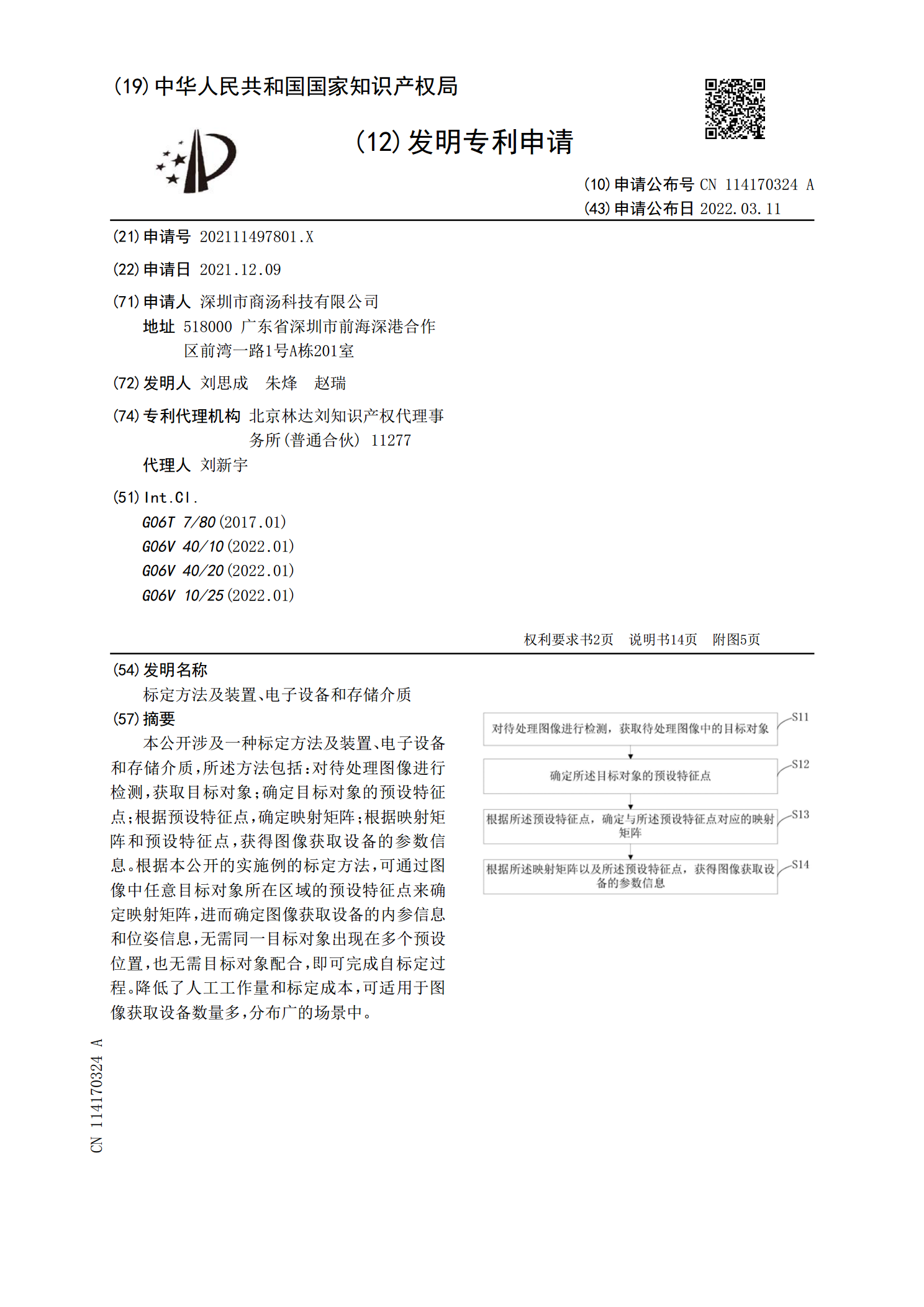
本公开涉及一种标定方法及装置、电子设备和存储介质,所述方法包括:对待处理图像进行检测,获取目标对象;确定目标对象的预设特征点;根据预设特征点,确定映射矩阵;根据映射矩阵和预设特征点,获得图像获取设备的参数信息。根据本公开的实施例的标定方法,可通过图像中任意目标对象所在区域的预设特征点来确定映射矩阵,进而确定图像获取设备的内参信息和位姿信息,无需同一目标对象出现在多个预设位置,也无需目标对象配合,即可完成自标定过程。降低了人工工作量和标定成本,可适用于图像获取设备数量多,分布广的场景中。
一种激光雷达标定方法、存储介质和电子设备.pdf
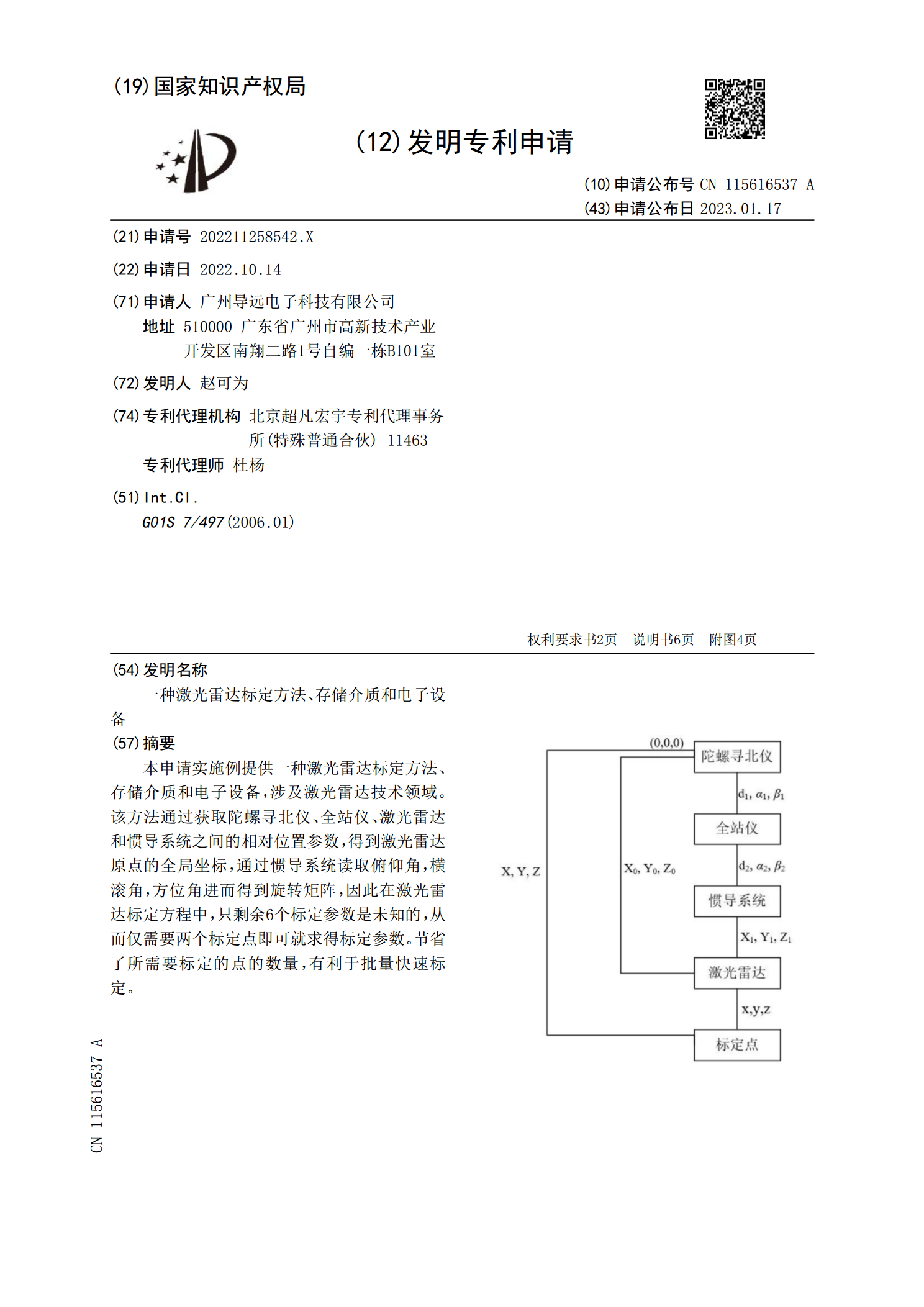
本申请实施例提供一种激光雷达标定方法、存储介质和电子设备,涉及激光雷达技术领域。该方法通过获取陀螺寻北仪、全站仪、激光雷达和惯导系统之间的相对位置参数,得到激光雷达原点的全局坐标,通过惯导系统读取俯仰角,横滚角,方位角进而得到旋转矩阵,因此在激光雷达标定方程中,只剩余6个标定参数是未知的,从而仅需要两个标定点即可就求得标定参数。节省了所需要标定的点的数量,有利于批量快速标定。

交通雷达的位置标定方法及装置、存储介质、电子设备.pdf
本公开实施例是关于一种交通雷达的位置标定方法及装置、存储介质、电子设备,涉及点云数据处理技术领域,该方法包括:获取通过交通雷达检测到的第一目标对象在雷达坐标系中的第一当前点云数据;其中,所述第一目标对象为自轴旋转的角反射器,所述第一当前点云数据为所述自轴旋转的角反射器在旋转过程中生成的数据;对所述第一当前点云数据进行预处理,得到第一目标点云数据;对所述第一目标点云数据进行坐标转换,得到所述第一目标对象在全局坐标系中的第一坐标位置;根据所述第一坐标位置对所述交通雷达的当前位置进行标定,得到所述交通雷达的目标