
智能网联混合动力汽车多系统动态协调控制系统及方法.pdf

代瑶****zy


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能网联混合动力汽车多系统动态协调控制系统及方法.pdf
智能网联混合动力汽车多系统动态协调控制系统及方法,涉及汽车智能安全与自动驾驶。系统包括数据模块、数据感知模块、与多系统动态协调控制系统。智能网联混合动力汽车通过车载传感器获得车辆状态信息,并将其发送给多系统动态协调控制模块;多系统动态协调控制模块根据获得的车辆状态信息,求解最优发动机功率与电机功率分配方案以提高车辆的燃油经济性;建立可准确表征智能网联混合动力汽车多过程耦合的车辆动力学模型,作为智能网联混合动力汽车多系统动态协调控制算法的执行机构,执行由多系统动态协调控制器输出的可执行控制信号,进行车辆状态
一种智能网联混合动力车辆域控制系统及其控制方法.pdf
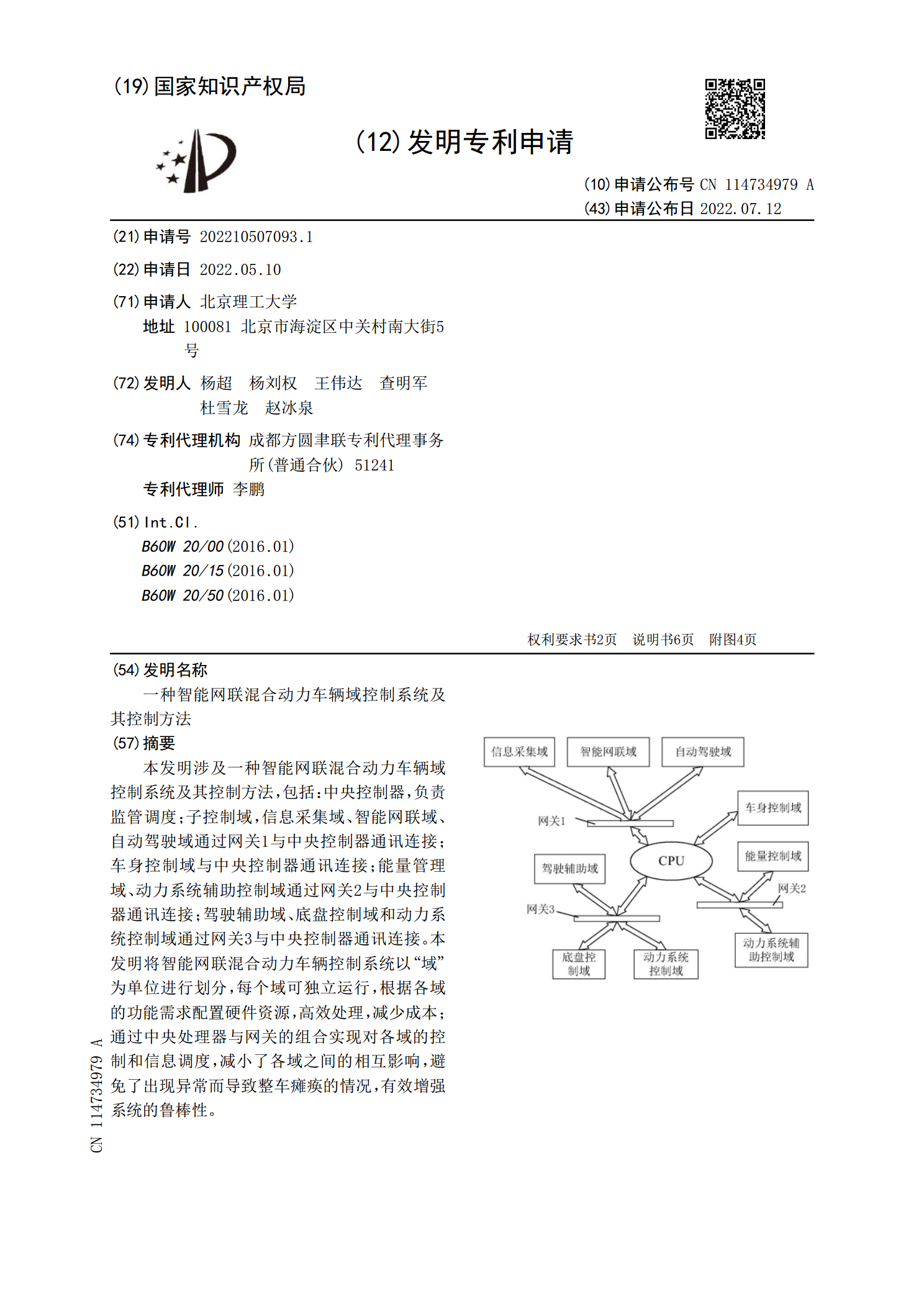
本发明涉及一种智能网联混合动力车辆域控制系统及其控制方法,包括:中央控制器,负责监管调度;子控制域,信息采集域、智能网联域、自动驾驶域通过网关1与中央控制器通讯连接;车身控制域与中央控制器通讯连接;能量管理域、动力系统辅助控制域通过网关2与中央控制器通讯连接;驾驶辅助域、底盘控制域和动力系统控制域通过网关3与中央控制器通讯连接。本发明将智能网联混合动力车辆控制系统以“域”为单位进行划分,每个域可独立运行,根据各域的功能需求配置硬件资源,高效处理,减少成本;通过中央处理器与网关的组合实现对各域的控制和信息调

智能网联汽车测试系统及方法.pdf
本发明公开了一种智能网联汽车测试系统及方法,涉及智能网联汽车的测试与标定技术领域,智能网联汽车测试系统包括:转毂平台,其用于放置待测试的智能网联汽车,以模拟智能网联汽车的行驶状态;测试装置,其与转毂平台间隔设置,测试装置上设置有电机,电机上设置有模拟标牌,且电机用于驱使模拟标牌沿着设定的多种运动轨迹移动;以及信息采集装置,其包括摄像头和雷达,摄像头用于采集模拟标牌的内容信息,雷达用于采集模拟标牌的目标信息,摄像头和雷达还用于将内容信息和目标信息反馈至智能网联汽车,以通过转毂平台驱使智能网联汽车执行对应的行

智能网联汽车电子控制系统阅读随笔.docx
《智能网联汽车电子控制系统》阅读随笔1.内容简述简要介绍了智能网联汽车的概念及其发展趋势,让读者对智能网联汽车有一个初步的认识。重点介绍了汽车电子控制系统的基本原理和构成,包括其硬件和软件部分,让读者了解汽车电子控制系统的基本架构和工作原理。本书详细阐述了智能网联汽车中的电子控制系统如何与互联网、物联网等技术进行融合,实现车辆智能化和网联化。包括车载网络通信系统、车载智能终端、远程服务与管理系统等关键技术进行了深入探讨。针对智能网联汽车的实际应用,介绍了电子控制系统在自动驾驶、智能导航、车辆安全、节能环保

智能网联技术应用于混合动力汽车探析.docx
智能网联技术应用于混合动力汽车探析标题:智能网联技术应用于混合动力汽车探析摘要:随着技术的不断进步,智能网联技术逐渐应用于汽车领域,并对汽车产业带来了巨大影响。本论文通过探讨智能网联技术在混合动力汽车领域的应用,旨在深入分析智能网联技术对于混合动力汽车的发展和改进所带来的重要意义。本文首先介绍了智能网联技术的概念和发展现状,接着重点探讨了智能网联技术在混合动力汽车中的应用,包括车辆监控、智能导航、智能驾驶等方面。最后,通过分析智能网联技术在混合动力汽车中的优势和挑战,展望了智能网联技术在未来的发展前景。一