
基于单目相机的目标测距方法和系统.pdf

是你****平呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于单目相机的目标测距方法和系统.pdf
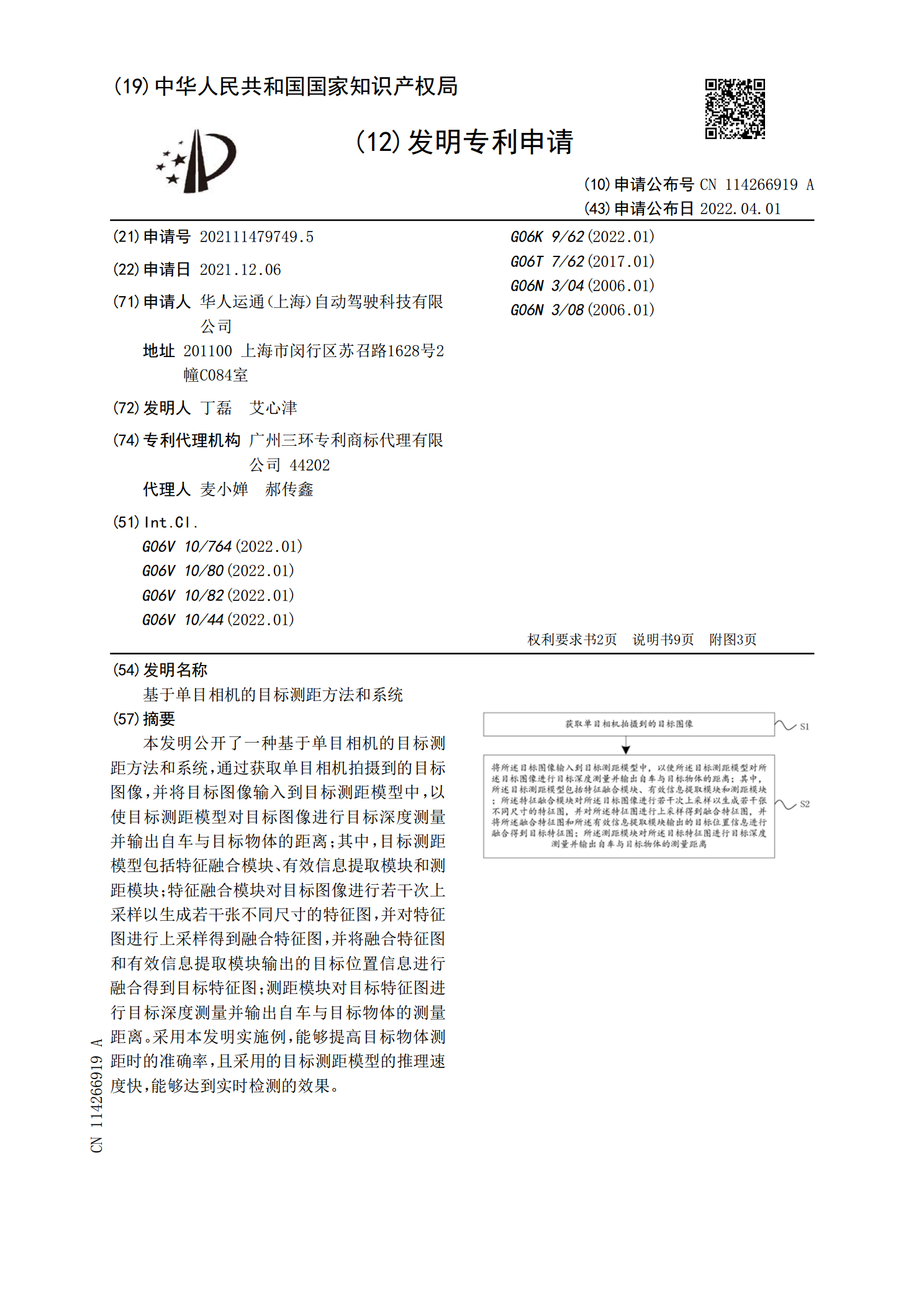
本发明公开了一种基于单目相机的目标测距方法和系统,通过获取单目相机拍摄到的目标图像,并将目标图像输入到目标测距模型中,以使目标测距模型对目标图像进行目标深度测量并输出自车与目标物体的距离;其中,目标测距模型包括特征融合模块、有效信息提取模块和测距模块;特征融合模块对目标图像进行若干次上采样以生成若干张不同尺寸的特征图,并对特征图进行上采样得到融合特征图,并将融合特征图和有效信息提取模块输出的目标位置信息进行融合得到目标特征图;测距模块对目标特征图进行目标深度测量并输出自车与目标物体的测量距离。采用本发明实
一种基于单目相机的海面测距方法和系统.pdf
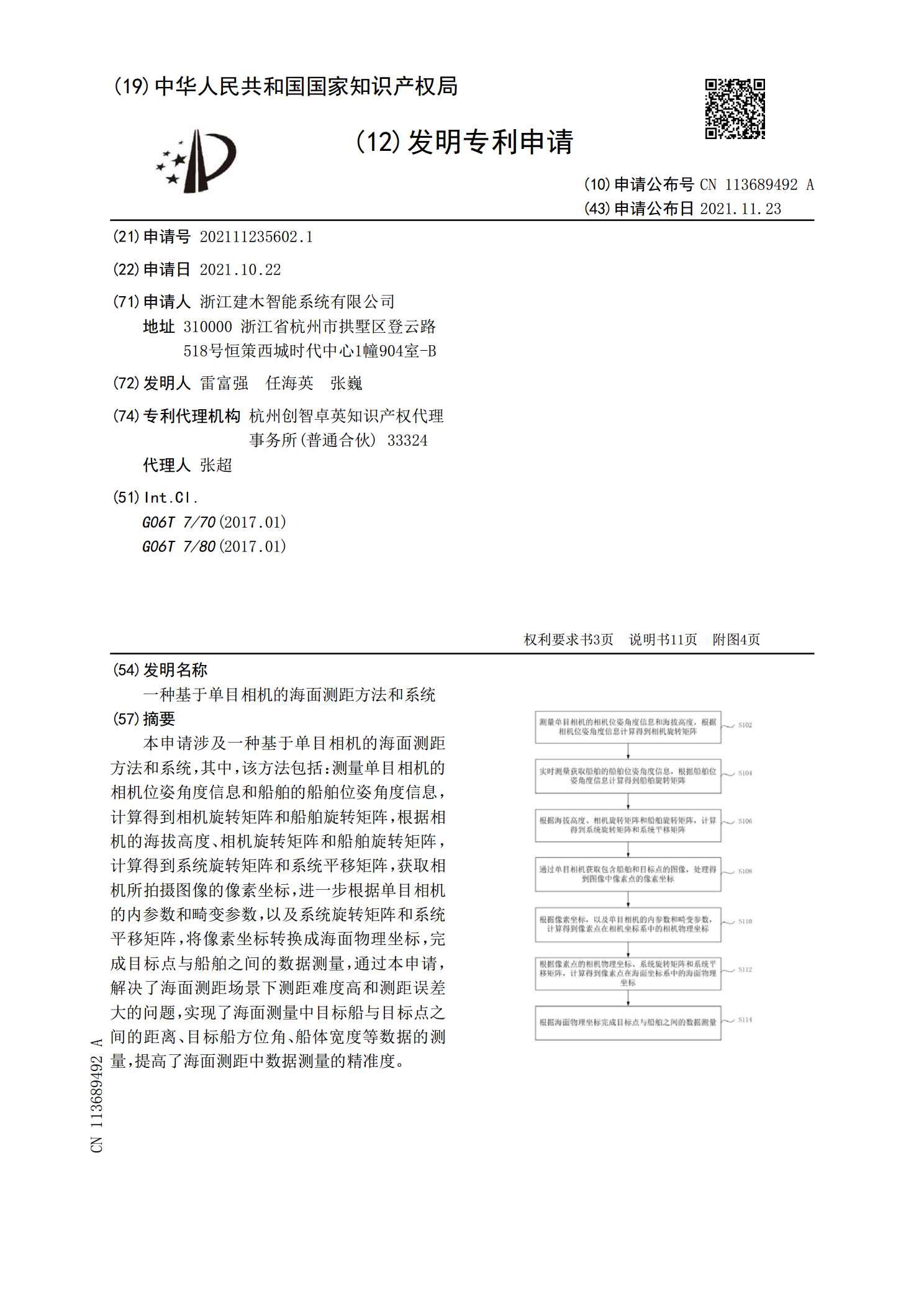
本申请涉及一种基于单目相机的海面测距方法和系统,其中,该方法包括:测量单目相机的相机位姿角度信息和船舶的船舶位姿角度信息,计算得到相机旋转矩阵和船舶旋转矩阵,根据相机的海拔高度、相机旋转矩阵和船舶旋转矩阵,计算得到系统旋转矩阵和系统平移矩阵,获取相机所拍摄图像的像素坐标,进一步根据单目相机的内参数和畸变参数,以及系统旋转矩阵和系统平移矩阵,将像素坐标转换成海面物理坐标,完成目标点与船舶之间的数据测量,通过本申请,解决了海面测距场景下测距难度高和测距误差大的问题,实现了海面测量中目标船与目标点之间的距离、目
基于三维相机或单目相机在导轨上滑动场景的测距方法.pdf
本发明公开了一种基于三维相机或单目相机在导轨上滑动场景的测距方法,包括:由单目相机在光学导轨上滑动或利用三维相机采集同一光轴上的一组远图和近图;把近图进行缩放,得到一系列连续的缩放图;把远图和缩放图二值化,再进行边缘提取,得到远图和近图的二值化的轮廓图;一系列近图的轮廓图依次和远图的轮廓图进行矩形卷积;比较全部的卷积值得到最大卷积值,读取最大卷积值所在的两矩阵的位置,以及重合时候的缩放得到的近图大小;保留远图和最大卷积值对应的缩放图重合的那部分,再和原来的近图组成一组信息量相等的图像。本发明为更为准确且便
一种单目相机旋转测距方法及装置.pdf
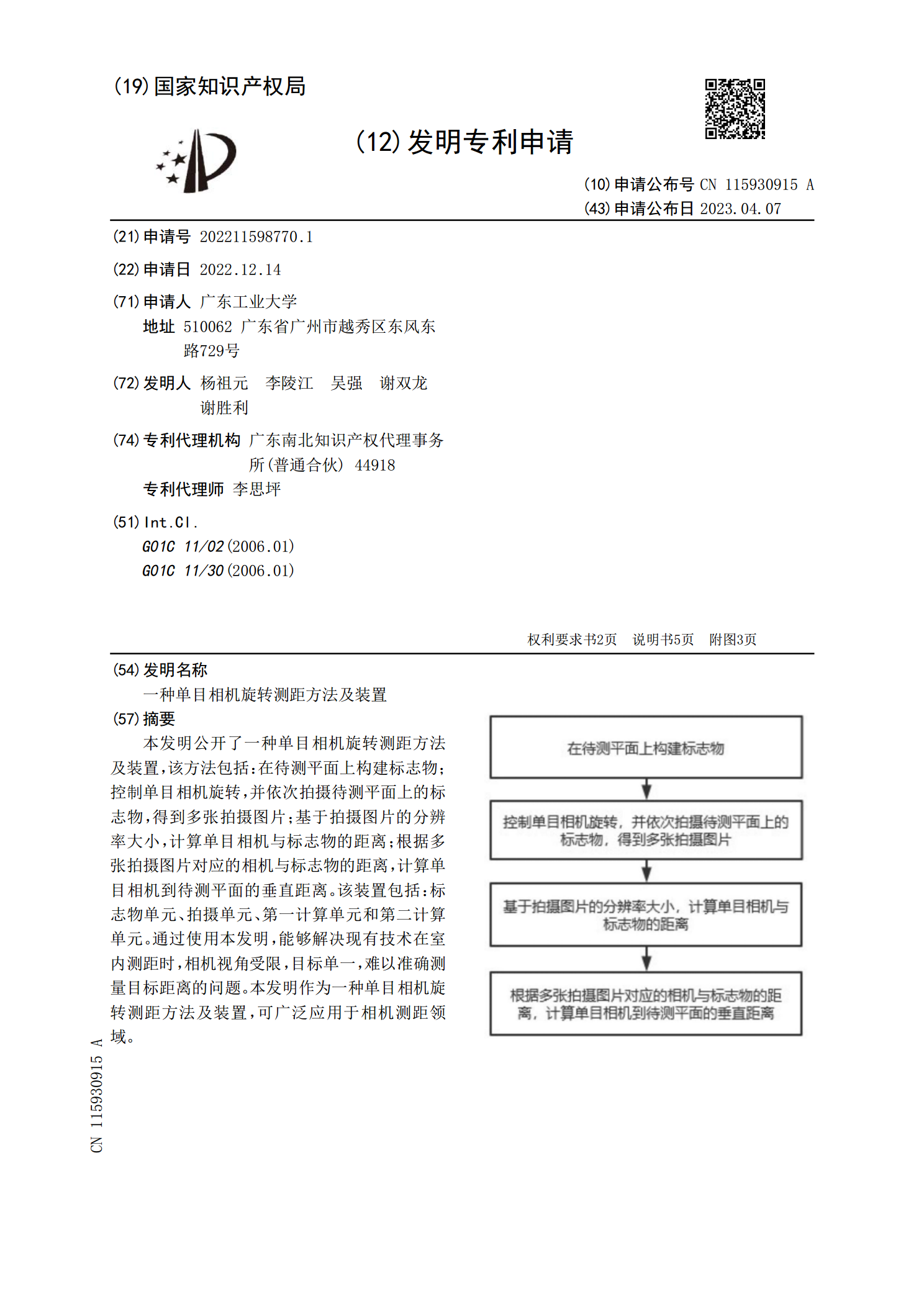
本发明公开了一种单目相机旋转测距方法及装置,该方法包括:在待测平面上构建标志物;控制单目相机旋转,并依次拍摄待测平面上的标志物,得到多张拍摄图片;基于拍摄图片的分辨率大小,计算单目相机与标志物的距离;根据多张拍摄图片对应的相机与标志物的距离,计算单目相机到待测平面的垂直距离。该装置包括:标志物单元、拍摄单元、第一计算单元和第二计算单元。通过使用本发明,能够解决现有技术在室内测距时,相机视角受限,目标单一,难以准确测量目标距离的问题。本发明作为一种单目相机旋转测距方法及装置,可广泛应用于相机测距领域。
一种基于单目相机的三维目标定位方法及系统.pdf
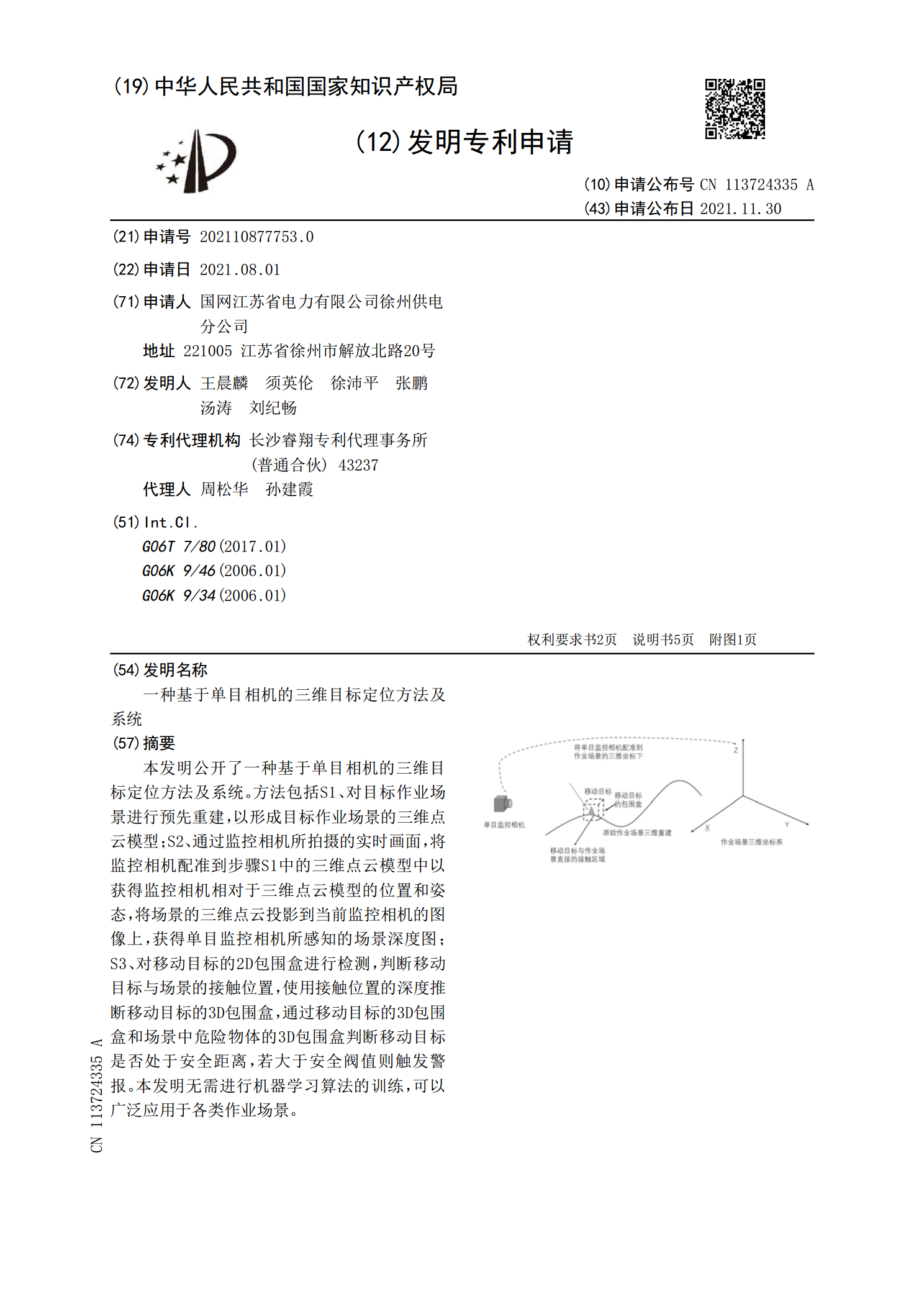
本发明公开了一种基于单目相机的三维目标定位方法及系统。方法包括S1、对目标作业场景进行预先重建,以形成目标作业场景的三维点云模型;S2、通过监控相机所拍摄的实时画面,将监控相机配准到步骤S1中的三维点云模型中以获得监控相机相对于三维点云模型的位置和姿态,将场景的三维点云投影到当前监控相机的图像上,获得单目监控相机所感知的场景深度图;S3、对移动目标的2D包围盒进行检测,判断移动目标与场景的接触位置,使用接触位置的深度推断移动目标的3D包围盒,通过移动目标的3D包围盒和场景中危险物体的3D包围盒判断移动目标